

1.6 Выравнивание нагрузочных диаграмм маховиком
1.6.1 Общие положения
Нагрузочная диаграмма на валу электропривода и на валу рабочей машины обычно не совпадают (даже с учетом приведения моментов к одному движению). Они могут совпасть (без учета потерь в передачах) лишь при абсолютно жесткой механической характеристике (для синхронного приводного двигателя) либо при J=0, что практически невозможно.
При
![]() и
и![]() (то есть даже при незначительной жесткости
естественных механических характеристик)
нагрузочные диаграммыМ=f(t)
и P=f(t)
электропривода и рабочей машины будут
отличаться вследствие работы инерционных
масс в периоды изменения скорости.
(то есть даже при незначительной жесткости
естественных механических характеристик)
нагрузочные диаграммыМ=f(t)
и P=f(t)
электропривода и рабочей машины будут
отличаться вследствие работы инерционных
масс в периоды изменения скорости.
При уменьшении
скорости в периоды пиков нагрузки часть
запаса кинетической энергии, накопленной
в инерционных массах электропривода и
рабочей машины (![]() ,
где
,
где![]() ),
расходуется на выполнение части полезной
работы, которую должен выполнить
двигатель.
),
расходуется на выполнение части полезной
работы, которую должен выполнить
двигатель.
Таким образом, при пиках нагрузки инерционные массы отдают часть запаса кинетической энергии, а при сбросе нагрузки, когда скорость электропривода растет, происходит зарядка инерционных масс.
Нагрузочная диаграмма на валу двигателя МД=f(t) и PД=f(t) вследствие работы инерционных масс всегда несколько сглажена по сравнению с нагрузочной диаграммой ММ=f(t) и PМ=f(t) на валу рабочей машины.
Если представить
себе, что момент инерции на валу привода
![]() ,
то было бы полное выравнивание пиков
нагрузки на валу двигателя, то есть
,
то было бы полное выравнивание пиков
нагрузки на валу двигателя, то есть![]() ,
скорость
двигателя при
этом не менялась бы.
,
скорость
двигателя при
этом не менялась бы.
Реальную нагрузочную диаграмму на валу двигателя можно получить лишь после расчета переходных процессов М(t) и I(t), причем если электромагнитная постоянная времени якоря двигателя (для машин постоянного тока обозначается как ТЯ) значительно меньше электромеханической постоянной времени (ТМ), то необходимо выполнить лишь расчет механического переходного процесса М(t).
При работе электропривода с резко неравномерной нагрузкой (молоты, ножницы, поршневые компрессоры, ткацкие станки, лесопильные рамы, поршневые насосы, некоторые прокатные станы и др.) работа двигателя характеризуется частыми пиками тока (момента, мощности), что может создавать следующие нежелательные явления и затруднения в эксплуатации таких маховичных электроприводов:
1) перегрузки, затруднения в выборе уставок защиты, нарушение селективности и отключение от источника питания не данного двигателя с пиком нагрузки, а последующих ступеней защиты, например, выключение трансформатора, питающего несколько электроприводов;
2) колебания напряжения в сети (последнее не существенно в современных заводских сетях большой мощности, но имеет значение для установок с автономными источниками питания, а также для установок, в которых питающий трансформатор удален от электропривода с пиковыми нагрузками на значительное расстояние);
3) в лобовых частях обмотки двигателя при пиках нагрузки возникают значительные механические усилия;
4
 )
и ток, что увеличивает потери электроэнергии
и приводит к выбору двигателя с завышенным
номинальным моментом.
)
и ток, что увеличивает потери электроэнергии
и приводит к выбору двигателя с завышенным
номинальным моментом.
Устранить перечисленные затруднения можно, если применить двигатель с относительно «мягкой» характеристикой (естественной или искусственной) и установить на валу двигателя маховик.
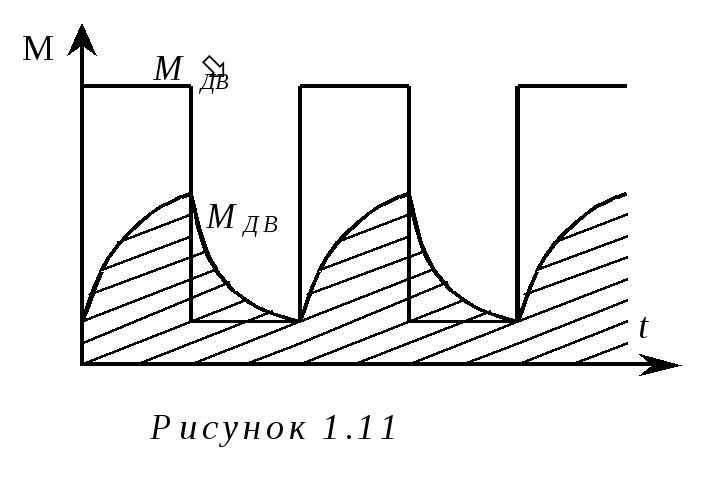
В этом случае маховик используется для выравнивания нагрузочной диаграммы на валу двигателя за счет кинетической энергии маховика.
Пики нагрузки на
валу двигателя снижаются, провалы
нагрузки в периоды холостого хода
заполняются нагрузкой от зарядки
маховика. Таким образом, двигатель,
выбранный по сглаженной нагрузочной
диаграмме (на рис. 1.11 она заштрихована),
будет меньшей мощности. Лучшее сглаживание
нагрузки на валу двигателя будет при
большей посадке скорости (![]() ).
На рисунке 1.11
).
На рисунке 1.11![]() – момент, приведенный к валу двигателя
без учета сглаживающего действия
маховика.
– момент, приведенный к валу двигателя
без учета сглаживающего действия
маховика.
Маховик в
электроприводе может выполнять и другую,
прямо противоположную функцию –
сглаживать не нагрузку на валу двигателя,
а сглаживать скорость электропривода.
Например, для электропривода проигрывателя
или магнитофона. В этом случае надо
выбирать двигатель с возможно более
жесткой характеристикой, а маховик
служит для сглаживания даже небольших
посадок (![]() )
скорости.
)
скорости.
Практикуется
установка маховиков в электроприводах
и с синхронными двигателями. Так как в
этом случае
![]() ,
то есть механическая характеристика
электропривода абсолютно жесткая, то
маховик не может ни отдавать, ни запасать
энергию в той форме, как это происходит
в электроприводе с жесткой характеристикой
(АД, ДНВ). В этом случае маховик служитдля уменьшения
частоты собственных колебаний ротора
в течение одного оборота, которая должна
быть меньше частоты вынужденных
колебаний, создаваемых моментом нагрузки.
,
то есть механическая характеристика
электропривода абсолютно жесткая, то
маховик не может ни отдавать, ни запасать
энергию в той форме, как это происходит
в электроприводе с жесткой характеристикой
(АД, ДНВ). В этом случае маховик служитдля уменьшения
частоты собственных колебаний ротора
в течение одного оборота, которая должна
быть меньше частоты вынужденных
колебаний, создаваемых моментом нагрузки.
Далее рассматривается работа электропривода с маховиком для выравнивания нагрузочной диаграммы. При выборе маховичного электропривода необходимо решить следующие задачи:
1. Какую часть пика нагрузки срезать за счет работы маховика, то есть как правильно распределить нагрузку между маховиком и двигателем;
2. Какие будут
колебания скорости при пиках нагрузки
и будет ли
![]() в допустимых (для технологического
процесса) пределах;
в допустимых (для технологического
процесса) пределах;
3. Какую механическую характеристику должен иметь двигатель в маховичном электроприводе;
4. До каких пор выгодно выравнивать нагрузку с точки зрения капитальных затрат на установку.
Вопрос о выборе маховичного электропривода должен решаться путем выполнения сравнительных технико-экономических расчетов. Это ответ на последний вопрос. При большем моменте инерции маховика уменьшается мощность, габарит и стоимость двигателя, но увеличиваются размеры и стоимость маховика. Оптимум здесь надо искать только путем сравнительных вариантных расчетов.
Далее рассмотрены лишь вопросы предварительного выбора МН двигателя (то есть его мощности) и J маховика.