

Тема 13. Розкриття статичної невизначуваності рам за методом сил.
Лекція 22. Ступінь статичної невизначуваності рами. Основна система і метод сил. Канонічні рівняння методу сил.
1. Ступінь статичної невизначуваності рами. В цій лекції треба відзначити, що кожний замкнутий стержньовий контур тричі статично невизначуваний. При n контурах кількість зайвих зв‘язків у системі, отже, і ступінь її статичної невизначуваності, дорівнюватиме 3n. Шарнір, у якому з‘єднуються два стержні, називається простим шарніром.
Якщо у плоскій стержньовій системі, що складається з n контурів, Ш простих шарнірів, то кількість зайвих зв‘язків дорівнюватиме
З= 3n –Ш.
У системі також можуть бути складні шарніри, де з’єднуються більше, ніж два стержні. Складний шарнір знімає число зв’язків на одиницю менше числа стержнів, які в ньому з’єднуються.
2. Основна система і метод сил. Основну систему можна одержати шляхом відкидання зайвих зв‘язків у заданій статично невизначуваній стержньовій системі. Основна система мусить бути геометрично незмінною.
Метод сил, який використовується при розрахунку статично невизначуваних систем, характеризується тим, що за зайві невідомі в ньому вибирають силові фактори (сили і моменти).
3. Канонічні рівняння методу сил. Додаткові рівняння переміщень, що виражають рівність нулю переміщень у напрямках зайвих невідомих, зручно складати в так званій канонічній формі. Переміщення, що входять до канонічних рівнянь, найчастіше визначають за методом Мора або згідно з правилом Верещагіна. Розрахунок статично невизначуваної рами зводиться до розрахунку основної системи, навантаженої зовнішніми силами і узагальненими невідомими – зусиллями, прикладеними в місцях, де зроблено розріз, введено шарніри чи рухому опору. На рис. 13.1 показана схема навантаження рами, а на рис.13.2 – один із варіантів вибору основної системи з прикладеними невідомими X1, X2, X3.
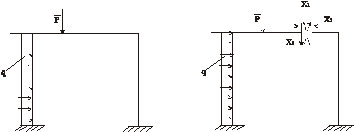
Рис.13.1 Рис.13.2
Система канонічних рівнянь являє собою своєрідну форму запису умов нерозрізності. Ці умови можна сформулювати так: взаємні переміщення від усіх навантажень в напрямі кожного із невідомих дорівнюють нулю.
Система канонічних рівнянь для рами, тричі статично невизначуваної, має вигляд:

З першого рівняння видно, що взаємне переміщення в основній системі в напрямі невідомого X1 дорівнює нулю з другого – що взаємне переміщення в напрямі X2 дорівнює нулю з третього – що взаємне переміщення в напрямі X3 дорівнює нулю.
Лекція 23. Розрахунок статично невизначуваних рам з урахуванням симетрії (симетрична рама, симетричне та асиметричне навантаження). Розкриття статичної невизначуваності рами від дії симетричного навантаження. Розрахунок статично невизначуваної рами від дії кососиметричного навантаження.
Слід особливу увагу звернути на раціональний вибір основної системи, оскільки від цього залежить обсяг обчислюваної роботи. Слід прагнути до того, щоб більше стержнів основної системи в одиничних і навантажувальних станах мали нульові епюри. Це спрощує обчислення коефіцієнтів і вільних членів рівняння. Крім того, необхідно використати симетрію рами, якщо вона є.
Основна система для симетричної рами також має бути симетричною (при цьому враховується не лише симетрія геометрична, але й пружна-жорсткостей стержнів). Для спрощення розрахунків можна використати такі властивості симетрії: від симетричного навантаження епюри моментів симетричні, від кососиметричного – кососиметричні; причому “добуток” цих епюр дорівнює нулю; як висновок цього – від симетричного зовнішнього навантаження в рамі у перерізі на осі симетрії виникають лише симетричні невідомі (наприклад, момент і нормальна сила), від кососиметричного – лише кососиметричні (перерізуюча сила).
Розв’язання задач по темі “Розкриття статичної невизначуваності рам за методом сил”.
Задача 13.1. Розкрити статичну невизначуваність і побудувати епюру згинаючих моментів для рами, яка показана на рис.13.3.
Розв’язання. Рама тричі статично невизначувана. Виберемо основну систему, відкидаючи ліве затиснення. Дію затиснення замінимо двома силами Х1, Х2 і моментом Х3 (рис.13.4). Тоді канонічні рівняння для рами набирають такого вигляду:

Рис. 13.3
 ,
,
 ,
,
 .
.
Основні переміщення в рамі, що розглядаються, визначаються згином. У зв’язку з цим, нехтуючи зсувом і стисканням стержнів, будуємо епюри згинаючих моментів від заданої сили Р і від трьох одиничних силових факторів (рис.13.4). Визначаємо коефіцієнти рівнянь, ураховуючи при цьому, що жорсткість на згинання всіх ділянок рами є сталою і дорівнює ЕІ. Величина δ11 визначається множенням першої одиничної епюри самої на себе.

Рис. 13.4
Тоді
 .
.
Зазначимо, що величини δік при і=к завжди додатні, оскільки площі епюр і ординати мають загальний знак.
Далі визначимо інші коефіцієнти рівнянь, помноживши відповідні епюри:
 ,
, ,
, ,
,
 ,
, ,
,
 ,
, ,
, .
.
Підставляємо знайдені коефіцієнти в канонічні рівняння. Після скорочень отримаємо:
 ,
,
 ,
,
 .
.
Розв’язавши цю систему рівнянь, знайдемо:
 ,
, ,
, .
.
Отже, розкриття статичної невизначуваності на цьому завершуємо. За цими даними будуємо епюру згинаючих моментів рами. Для цього треба просумувати епюру моментів від заданих сил і епюри моментів від трьох одиничних, збільшених відповідно в Х1, Х2, і Х3 разів.
Сумарна епюра згинаючих моментів показана на рис. 13.5. Там також показана форма зігнутої осі рами.
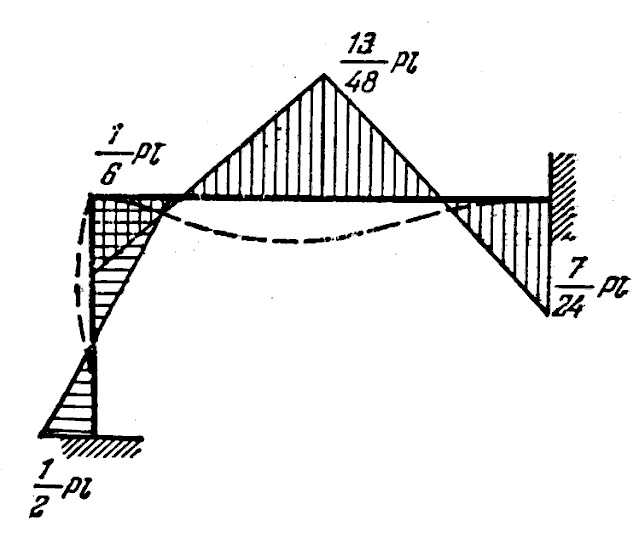
Рис.13.5
Задача 13.2. Розкрити статичну невизначуваність і побудувати епюру згинаючих моментів для рами, показаної на рис.13.6.
Розв’язання. Рама – симетрична і навантажена кососиметрично розташованими силами. Розрізаємо її по осі симетрії і в перерізі прикладаємо сили Х1 (рис.13.7). Симетричні силові фактори тут дорівнюють нулю. Замість трьох рівнянь маємо одне:

Рис. 13.6
 ,
,
де
 ,
, .
.
Звідки
 .
.

Рис.13.7
Епюра згинаючих моментів і форма зігнутої осі рами показана на рис. 13.8.
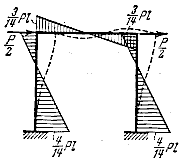
Рис.13.8
Здача 13.3. Визначити найбільший згинаючий момент в кільцевій рамі, навантаженій двома силами Р (рис.13.9).

Рис. 13.9
Рама тричі статично невизначу-вана, але умови симетрії дають змогу скоротити число невідомих до одного.
Розв’язання. Розріжемо раму по вертикальному діаметру АВ (рис.13.10,а), тобто, по осі симетрії. У перерізах А і В поперечні сили дорівнюють нулю. Рама одночасно симетрична відносно лінії дії сил. У зв’язку з цим
 і
і .
.
Позначимо момент через Х1. Тоді отримаємо еквівалентну систему, яка показана на рис.13.10,б).

Рис. 13.10
Канонічне рівняння для цієї рами запишемо так:
 .
.
У перерізі з кутовою координатою φ момент від заданих сил Р набирає вигляду
 .
.
Момент одиничного силового фактору дорівнює М1= -1.
Визначимо коефіцієнти канонічного рівняння
 ,
, .
.
Тоді
 .
.
Тоді згинаючий момент у довільному перерізі дорівнює алгебраїчній сумі моменту від заданих сил МР і моменту М1, який збільшуємо в Х1 разів.
Отже,
 .
.
Епюра згинаючих моментів для кільцевої рами показана на рис.13.11.

Рис.13.11
Задача 13.4. Визначити наскільки зменшиться діаметр АВ кільцевої рами (рис.13.12,а), якщо навантажити її силами Р.
Розв’язання. Статична невизначуваність цієї рами була розкрита в попередній задачі 13.3. Згинаючий момент для чверті рами АС в залежності від кута φ має такий вигляд:

Рис. 13.12
 .
.
Розріжемо раму в довільному перерізі і в точках А і В прикладаємо протилежно напрямлені одиничні сили (рис.13.12,б). Тоді в довільному перерізі для М1 маємо
 .
.
Величину зменшення діаметра δАВ отримаємо в такому вигляді:
 .
.
Задача 13.5. Визначити найбільший згина- ючий момент у прямокутній рамі, обпертій на шарнірно нерухому опору С і навантаженій силою Р (рис.13.13). Жорсткість рами ЕІ=const. Визначити також горизонтальне зближення точок А і В, які лежать на осі симетрії.
Рис. 13.13
Розв’язання. Рама тричі статично невизначу- вана, але умови симетрії дають змогу скоротити число невідомих до однієї.
Розріжемо раму впоперек по осі симетрії (рис.13.14).

Рис.13.14
У
перерізах А і В поперечні сили дорівнюють
нулю. Рама одночасно симетрична відносно
лінії дії сил:
 ,
, .
Позначимо момент через Х1.
Тоді отримаємо еквівалентну систему
(рис.13.14,б). Канонічне рівняння має вигляд:
.
Позначимо момент через Х1.
Тоді отримаємо еквівалентну систему
(рис.13.14,б). Канонічне рівняння має вигляд:
 .
.
Навантажену
епюру від сили
 ,
а також одиничну епюру від Х1=1
показано на рис13.15.
,
а також одиничну епюру від Х1=1
показано на рис13.15.
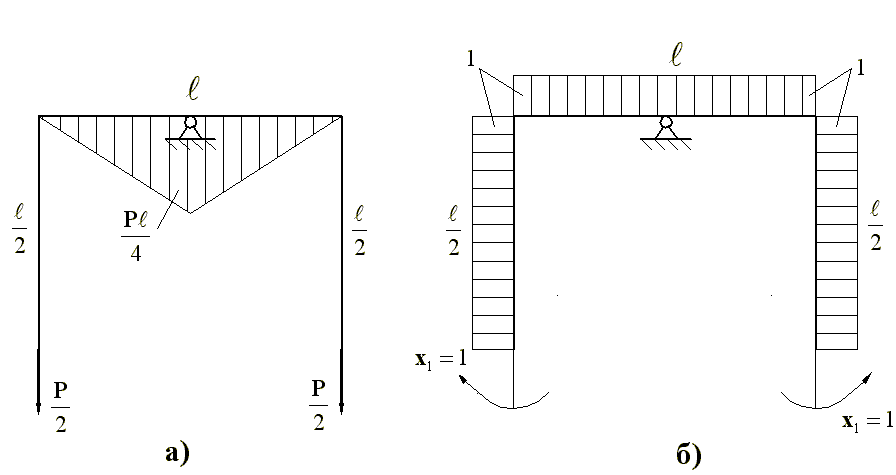
Рис. 13.15
У даному випадку коефіцієнти канонічного рівняння будуть дорівнювати:
 ;
; ,
тоді
,
тоді .
.
Побудуємо
епюру від
 для частини рами АСВ (рис.13.16).
для частини рами АСВ (рис.13.16).

Рис. 13.16
За одержаними даними на рис.13.17 побудована епюра згинаючих моментів.
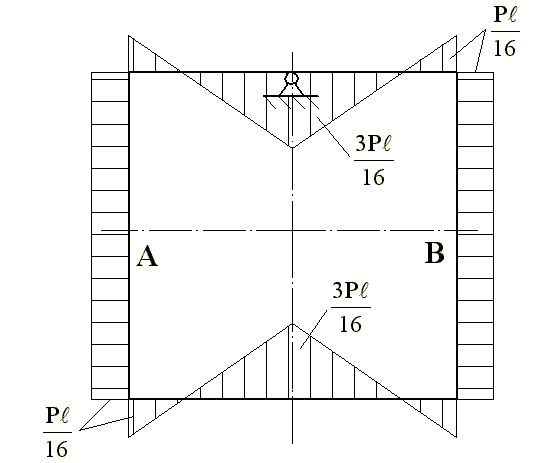
Рис. 13.17
Далі визначимо зближення δАВ точок А і В. Для цього в точках А і В прикладаємо протилежно напрямлені одиничні сили і будуємо від них епюру згинаючих моментів (рис.13.18).

Рис. 13.18
Для
визначення зближення δАВ
перемножимо
навантажні епюри згинаючих моментів
від сил
 (рис.13.15,а) і
(рис.13.15,а) і (рис.13.16) на епюру від одиничних навантажень
(рис.13.18), тоді матимемо:
(рис.13.16) на епюру від одиничних навантажень
(рис.13.18), тоді матимемо:
 .
.