

Пермский государственный технический университет
КАФЕДРА «Механика композиционных материалов и конструкций».
КУРСОВОЙ ПРОЕКТ
ПО ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Тема:
Задание:
Вариант:
Выполнил: студент группы
Проверил: профессор
Поезжаева Е.В.
Пермь 2005г.
Содержание:
Структурный анализ механизма………………………………………………3
Кинематический анализ механизма…………………………………………..4
Кинетостатический анализ механизма…………………………………….…9
Расчёт маховика………………………………………………………............12
Профилирование кулачка……………………………………………………17
Проектирование зубчатой передачи………………………………………...20
Указания по выполнению расчётов для курсового проекта по ТММ…….23
Список литературы…………………………………………………………...24
Структурный aнали3 кривошипно-ползунного механизма
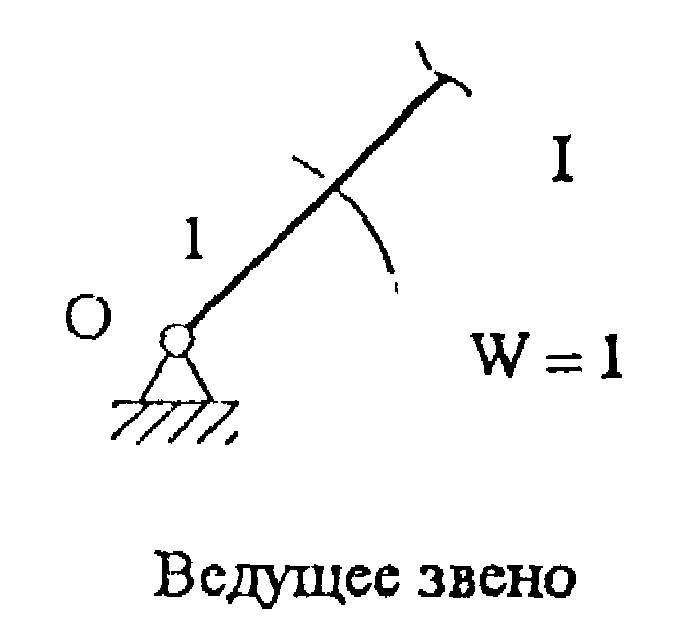
1. Изобразим структурную схему механизма
ОА — кривошип - совершает вращательное движение;
АВ - шатун - совершает плоскопараллельное движение;
В - ползун - совершает поступательное движение.

2. Найдем степень подвижности механизма по формуле Чебышева:
W=3n-2p5-p4
3. Разложим на структурные группы Ассура
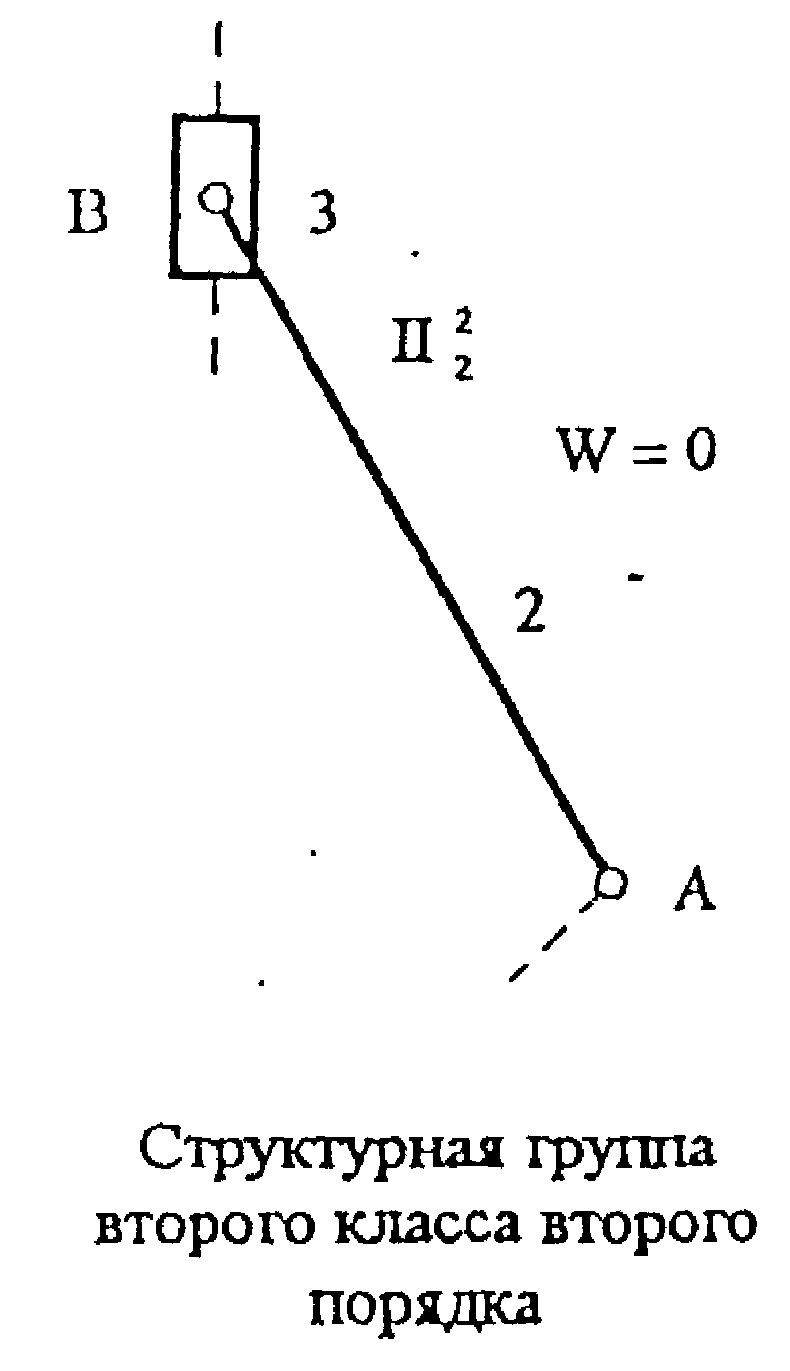
4. Запишем структурную формулу механизма I=>II22
5. Определим класс, порядок всего механизма.
Исследуемый механизм состоит из механизма первого класса и структурной группы второго класса второго порядка (шатун и ползун), следовательно, гидронасос ОАВ - механизм второго класса второго порядка.
Кинематический анализ механизма
Исходные
данные:
![]() OA=
м,
OA=
м,
![]() AB=
мм
AB=
мм
1 = с-1
При кинематическом анализе решаются три задачи:
задача о положениях;
задача о скоростях;
задача об ускорениях.
Задача о положениях
Проектирование кривошипно-ползунного механизма, Найдем крайние положения механизма: начало и конец рабочего хода. Начало рабочего хода найдем по формуле:
S'=l+r
где
l -длина кривошипа ОА
г - длина шатуна АВ
Конец рабочего хода найдем по формуле:
S"=l-r[м];
Рабочий ход
S=S' - S"=2r [м];
Построим механизм в масштабе
1
=
![]() AB
/ OA=
[м / мм]
AB
/ OA=
[м / мм]
Найдем длину АВ:
АВ
=
![]() AB/1=
[мм]
AB/1=
[мм]
Покажем перемещение точек в двенадцати положениях механизма. Для этого разделим окружность на 12 равных частей (используя метод засечек).
Построим шатунную кривую. Для этого найдем центр тяжести каждого звена и соединим плавной линией.
Планы положений механизма используются для определения скоростей и ускорений в заданных положениях.
Задача о скоростях
Кинематический анализ выполняется графоаналитическим методом, который отражает наглядность изменения скоростей и обеспечивает достаточную точность. Скорость ведущего звена:
![]() [мс-1]
[мс-1]
Запишем векторные уравнения:
VB = VA+VAB ; VB = VX+VBX
где VX=0; VA OA; VAB AB; VBX BX
Величины векторов VBA, VB, VS2 определим построением. Выберем масштаб плана скоростей
![]() [мс-1/мм].
[мс-1/мм].
Ге pa - отрезок, характеризующий величину скорости на чертеже = мм. От произвольной точки р - полюса плана скоростей отложим вектор ра,
перпендикулярный ОA. Через т. а проводим перпендикулярно АВ прямую. Точка пересечения оси х (выбранной в направлений т. в) с этой прямой даст т. в, соединив т. в с полюсом получим вектор скорости т. в. Определим величину скорости т. в:
![]() [мс-1]
[мс-1]
Положение т. на плане скоростей определим из пропорции:
![]()
Соединив т. S2 с полюсом р, получим величину и направление скорости т. S2:
![]() [мс-1]
[мс-1]
![]() [мс-1]
[мс-1]
Определим:
![]() [мс-1]
[мс-1]
![]() [мс-1]
[мс-1]
![]() [мс-1]
[мс-1]
Определим:
![]() [с-1]
[с-1]
Направление 2 определяется переносом вектора vba в т.В относительно т.А.
|
Параметр
|
Положение механизма
| |||||||||||
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
| |
|
VBA мс-1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vnx МС-1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vsi мс-1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VS2 мс-1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vs3 мс-1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 с-1
|
|
|
|
|
|
|
|
|
|
|
|
|