

 лочное
программирование
лочное
программирование
Глава 6. Блочное программирование
При решении задач большой размерности значительная часть времени тратится на обращения к внешней памяти и это является главным препятствием на пути увеличения размерности задач. Уменьшить число обращений к внешней памяти можно, если удается большую задачу заменить рядом задач существенно меньшей размерности. Приемы и методы, позволяющие выполнять такие преобразования, составляют предмет блочного программирования.
Одним из эффективных методов блочного программирования применительно к линейным задачам является метод декомпозиции Данцига – Вулфа. По данным авторов метод позволяет решать задачи с размерностью n106, m105.
6.1. Метод декомпозиции Данцига - Вулфа
Сначала рассмотрим математические преобразования, приводящие к разбиению исходной задачи, а затем покажем, в каких случаях это дает эффект по сравнению с непосредственным решением большой задачи.
Пусть имеется следующая модель задачи:
L=CTXmax; (6.1)
AX=B; (6.2)
X0, (6.3)
где вектор X имеет размерность n, а векторB– m.
Условия (6.2), (6.3) определяют допустимое множество задачи D. Представим матрицуАи векторВв виде двух подматриц:
Тогда условия задачи (6.2)-(6.3) записываются следующим образом:
А(0)Х=В(0); (6.4)
А(1)Х=В(1); (6.5)
Х0 (6.6)
Условия (6.4), включающие m0 равенств, порождают допустимое множество D0, а система (6.5) содержитm1 равенств и вместе с (6.6) задает множество D1. Очевидно, что m=m0+m1, D= D0 D1. При этом выделение подматриц выполняется так, что m1>>m0.
Далее будем полагать, что множество D1 ограниченное и, значит, является выпуклым многогранником. В противном случае его легко сделать ограниченным добавлением ограничений сверху на переменные так, что они не повлияют на исходное множество D.
Предположим, что нам известны вершины множества D1. Обозначим их координаты через Х1,Х2,…,ХN, где N – число вершин. ПосколькуD1 – выпуклый многогранник, то любую его точку можно представить в виде линейной комбинации вершин:
Х=![]() zX;
(6.7)
zX;
(6.7)
z=1; (6.8)
z0, v. (6.9)
Так как все решения Х, определяемые по (6.7)-(6.9), принадлежатD1, то описание (6.7)-(6.9) эквивалентно (6.5), (6.6).
Подставим Хв виде (6.7) в (6.1) и (6.4):
L =![]() CT
zX;
CT
zX;
A(0)Xz=B(0).
Считая X известными, введем обозначения:
СТХ=; (6.10)
А(0)Х=Р. (6.11)
Тогда преобразованная модель задачи запишется в виде
L=![]() zmax;
zmax;
![]() Pz=B(0);
Pz=B(0);
![]() z=1;
z=1;
z0.
В этой модели неизвестными являются z, число которых равно числу вершин многогранникаD1. Последнее равенство модели можно объединить со всеми остальными, используя обозначения расширенных векторов
![]() .
(6.12)
.
(6.12)
Тогда окончательно получим:
L=![]() zmax;
(6.13)
zmax;
(6.13)
![]()
![]() z
=
z
=
![]() ;
(6.14)
;
(6.14)
z0. (6.15)
Задача в виде (6.13) – (6.15) называется координирующейилиосновнойзадачей. Главное отличие этой задачи от исходной в несравнимо меньшем числе условий (m0+1<<m).
Если мы сможем ее решить, то есть найти Z*, то получим решение и исходной задачи, воспользовавшись (6.7):
Х*=![]() z*X.
(6.16)
z*X.
(6.16)
Для решения основной задачи применим модифицированный симплекс-метод. Начальное решение можно построить, не зная ни одной вершины, с помощью искусственных переменныхzN+i.
Согласно модифицированному методу после получения очередного базисного решения вычисляются относительные оценки. В разд. 4.10 получены формулы:
![]()
![]()
Перепишем их в обозначениях координирующей задачи:
![]() (6.17)
(6.17)
![]()
или окончательно
![]() (6.18)
(6.18)
Мы не можем вычислить все оценки, так как нам не известно даже их число. Но этого и не требуется, достаточно только определить: есть или нет среди них отрицательные. Для ответа на этот вопрос будем искать наименьшую оценку. Если она отрицательная, текущее решение координирующей задачи может быть улучшено введением переменной с этой оценкой. В противном случае констатируется выполнение признака оптимальности.
Итак, задача состоит в следующем:
min.
Отбросив в (6.18) константу, запишем ее в виде
(TA(0)-CT)X![]() (6.19)
(6.19)
Решение задачи (6.19) проблематично, так как минимум ищется на дискретном множестве вершин многогранника D1. Учитывая, что минимизируемая функция линейная, будем искать решение не на вершинах, а на всем многограннике. Известно, что если решение существует, то оно будет достигаться в вершине. Поэтому решение на всем (непрерывном) множествеD1 совпадет с решением задачи (6.19).
Таким образом, задачу (6.19) заменяем эквивалентной:
Lвсп=
(TA(0)-CT)X![]() (6.20)
(6.20)
A(1)X = B(1); (6.21)
X 0. (6.22)
Эта
задача называется вспомогательной.
Если она неразрешима, то и исходная
задача не имеет решения. Пусть оптимальное
решение вспомогательной задачи
(6.20)-(6.22) достигается в вершине r.
Это означает, что нам становятся известны
координаты вершины Xr
и оптимальное значение критерия
![]() .
Тогда согласно формуле (6.18) вычисляем
минимальную оценку
.
Тогда согласно формуле (6.18) вычисляем
минимальную оценку
![]() (6.23)
(6.23)
Очевидно,
что если r0,
то и все оценки неотрицательны, и решение
координирующей задачи завершено. При
отрицательнойrрешение продолжается. В базис основной
задачи вводится вектор![]() ,
определяемый по формуле
,
определяемый по формуле
![]() (6.30)
(6.30)
Направляющий столбец находится разложением этого вектора по текущему базису:
![]() .
(6.31)
.
(6.31)
После определения направляющего элемента и симплекс-преобразования получаем новое решение основной задачи. Коэффициент критерия (6.13) при переменной, введенной в базисное решение, вычисляется согласно (6.10):
r =CTXr. (6.32)
Теперь
по формуле (6.17) находим новый вектор
![]() ,
снова решаем вспомогательную задачу и
по полученной минимальной оценке делаем
вывод о дальнейших действиях.
,
снова решаем вспомогательную задачу и
по полученной минимальной оценке делаем
вывод о дальнейших действиях.
Таким образом, решение исходной задачи заменяется многократным решением основной и вспомогательной задач. При этом порядок размерности вспомогательной задачи такой же, как у исходной. Поэтому естественнен вопрос: в каких случаях такой метод эффективен?
Ответ очевиден: в тех случаях, когда сложность решения вспомогательной задачи намного ниже, чем исходной. Такие случаи имеют место, когда матрица условий задачи (после упорядочения строк и столбцов) оказывается почти-блочно-диагональной, как показано на рис. 6.1. Примером может служить задача планирования производства продукции в крупной фирме или холдинге, когда у каждого предприятия своя номенклатура продукции, а некоторые ресурсы являются общими. Подматрица А(0), входящая в параметры координирующей задачи, соответствует ограничениям по общим ресурсам. Такие условия называют связующими. Их относят к основной задаче.
О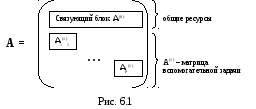 стальные
условия образуют вспомогательную
задачу. При этом подматрицаА(1)
имеет блочно-диагональную структуру,
что позволяет разбить вспомогательную
задачу на p независимых
задач:
стальные
условия образуют вспомогательную
задачу. При этом подматрицаА(1)
имеет блочно-диагональную структуру,
что позволяет разбить вспомогательную
задачу на p независимых
задач:
После решения этихзадач определяется критерий вспомогательной задачи по очевидной формуле
![]()
Таким образом, решение вспомогательной задачи существенно упрощается, если структура матрица условий может быть приведена к блочно-диагональной.
В следующем разделе декомпозиция вспомогательной задачи будет показана на примере решения транспортной задачи.
Применение рассмотренного метода может быть целесообразно и тогда, когда вспомогательная задача имеет особенности, позволяющие решать ее специальными методами.