

Федеральное агентство по образованию РФ
Государственное образовательное учреждение
высшего профессионального образования
«Пермский государственный технический университет»
Н.А. Шевелев, т.Е. Мельникова
ИССЛЕДОВАНИЕ ДИНАМИКИ
МЕХАНИЧЕСКИХ СИСТЕМ
Учебное пособие
Пермь 2007
УДК 534.1
Ш37
Рецензенты:
зам. директора ИМСС УрО РАН по научной работе, докт. физ.-матем. наук, профессор А.А. Роговой (Институт механики сплошных сред Уральского отделения РАН);
член-корр. АТН РФ, д-р техн. наук, профессор Г.Л. Колмогоров
(ГОУ ВПО «Пермский государственный технический университет»)
Шевелев Н.А., Мельникова Т.Е.
Ш37 Исследование динамики механических систем: Учеб. пособие / Перм. гос. техн. ун.-т. Пермь, 2007. 50 с.
Рассмотрены наиболее важные разделы теории механических колебаний: исследование вынужденных колебаний систем с конечным числом степеней свободы и систем с распределенными параметрами; приближенные методы расчета собственных частот колебаний; приведен численный алгоритм по проблеме собственных значений. Теоретические положения иллюстрируются примерами; дано описание лабораторных работ по указанным разделам курса и курсовой работы.
Предназначено для студентов специальности «Динамика и прочность машин», магистров и бакалавров техники и технологий по направлению «Прикладная механика», изучающих курс «Аналитическая динамика и теория колебаний».
УДК 534.1
© Пермский государственый
технический университет,
2007
Содержание
1. Исследование колебаний систем с конечным числом степеней свободы……………………………..………………………………………………..... 4
2. Исследование колебаний систем с распределенными параметрами (изгибные колебания балки постоянного поперечного сечения)……………....…... 13
3. Метод парабол отыскания корней алгебраических и трансцендентных уравнений…………………………………….……….………………………… 18
4.Приближенные методы расчета колебаний………………………………….28
4.1. Дискретизация систем с распределенными параметрами………………..29
4.2. Простейшие приближенные формулы для оценки низшей частоты…….30
4.3. Метод Релея – Ритца…………………………………………………..……33
4.4. Метод последовательных приближений (тематика курсовой работы)….35
Список литературы………………………………………………………………45
Приложение………………………………………………………………………46
1. Исследование колебаний систем с конечным числом степеней свободы
Рассмотрим вынужденные колебания линейной системы с одной степенью свободы [1]. В любой момент процесса вынужденных колебаний на груз массой m действуют две силы: сила упругости, пропорциональная смещению х груза, и возмущающая сила P(t), изменяющаяся во времени по некоторому закону. Дифференциальное уравнение движения груза в этом случае будет следующим:
![]() ,
(1)
,
(1)
где с– жесткость упругой связи. Обозначаяp2 = c/m, запишем уравнение (1) в стандартной форме:
 .
(2)
.
(2)
К этому же виду можно привести задачу о вынужденных колебаниях, вызываемых кинематическим способом (то есть при «кинематическом возбуждении»). Чтобы пояснить это, рассмотрим одномассовую систему (рис. 1), но предположим, что причиной колебаний служат заданные колебания точки крепления пружины.









 c
f(t)
c
f(t)
m
Рис. 1.
 Коэффициент жесткости
винтовой пружины
Коэффициент жесткости
винтовой пружины![]() гдеDдиаметр винтовой пружины;nколичество витков;dдиаметр поперечного сечения проволоки
пружины;Gмодуль упругости при сдвиге материала
проволоки [2].
гдеDдиаметр винтовой пружины;nколичество витков;dдиаметр поперечного сечения проволоки
пружины;Gмодуль упругости при сдвиге материала
проволоки [2].
Положим, что закон движения этой точки задан в виде f(t). В текущий момент времени удлинение пружины x = f(t) и на груз действует сила упругости пружины c(x – f(t)), соответственно этому дифференциальное уравнение имеет вид:
![]() (3)
(3)
или
 .
(4)
.
(4)
Произведение cf(t) можно принять за приведенную возмущающую силу P(t) = cf(t), что приводит уравнение (4) к стандартной форме (2).
Общее решение уравнения (2) может быть записано в виде
 .
(5)
.
(5)
Здесь первые два слагаемых выражают свободные колебания, порожденные начальными возмущениями X0 и V0, а последнее слагаемое вынужденные колебания, вызываемые возмущающей силой.
В случае нулевых начальных условий, когда движение начинается при X0 = 0 и V0 = 0, получим
 .
(6)
.
(6)
В случае кинематического возмущения решение (6) примет вид
 .
(7)
.
(7)
Одним из наиболее часто встречающихся в практике случаев действия возмущающей силы является случай, когда сила изменяется по гармоническому закону:
![]() ,
,
здесь P0 – амплитуда силы; – частота силы.
При 0 из выражения (6) получим
 ,
(8)
,
(8)
где xст = P0/c изгиб, вызываемый статически приложенной постоянной силой.
Решение (8) показывает, что при нулевых начальных условиях возникают сложные колебания, состоящие из двух частей: колебаний, происходящих с частотой возмущающей силы, первое слагаемое и колебаний, происходящих с собственной частотой, второе слагаемое.
Обычно первые колебания называют вынужденными, а вторые – свободными. Следует иметь в виду условность такой терминологии.
Решения, соответствующие стационарным, незатухающим колебаниям,
 .
.
Амплитуда вынужденных колебаний
 .
.
![]() В
случае кинематического возмущения,
если А
– амплитуда точки крепления, то
В
случае кинематического возмущения,
если А
– амплитуда точки крепления, то
![]()
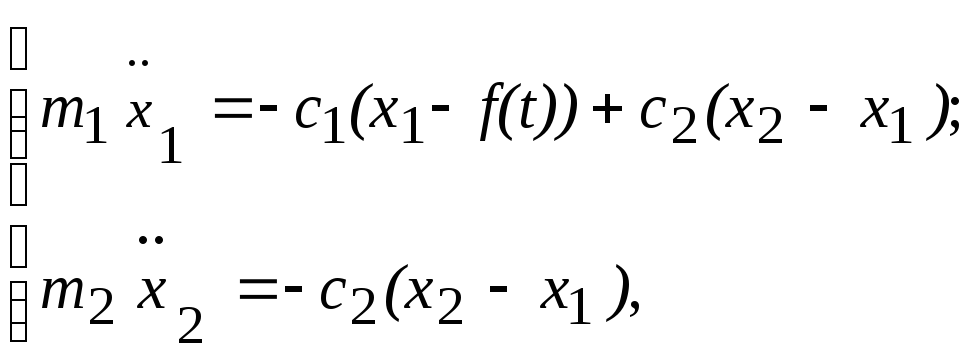
В случае колебания двухмассовой системы (см. рис. 2, система № 1), если точка первой массы колеблется по закону f(t), уравнение движения каждой из масс будет:
 (9)
(9)
где x1, x2 перемещения массы m1 и m2 соответственно.
Эти уравнения принято записывать таким образом, чтобы в правой части была возмущающая сила:
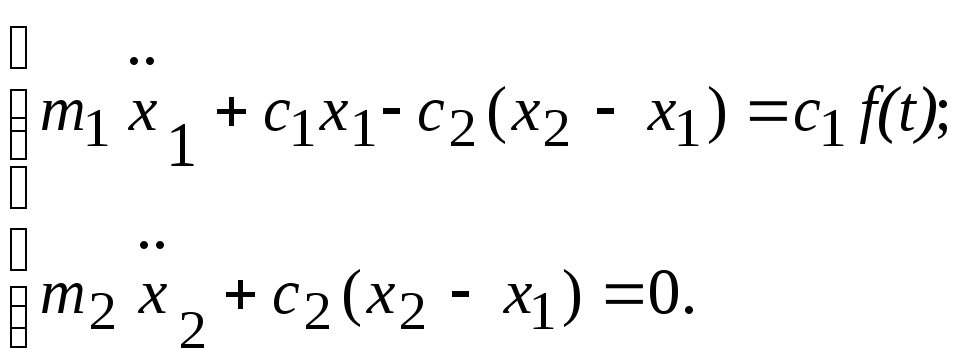 (10)
(10)
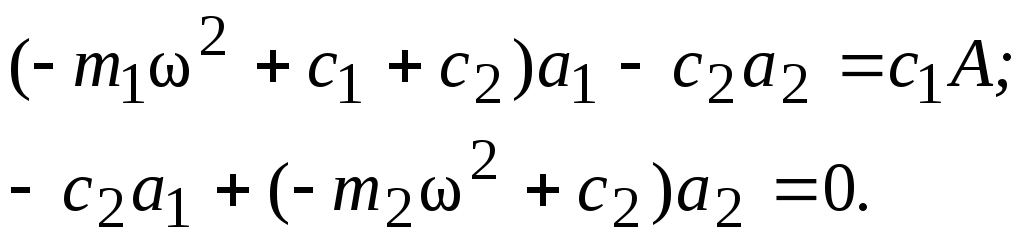
Пусть f(t) =A·sin t. Найдем решение, соответствующее стационарному режиму вынужденных колебаний. Для этого примем
![]() (11)
(11)
где a1, a2 – амплитуды колебаний каждой массы.
Подставляя (11) в (10), получим
Отсюда
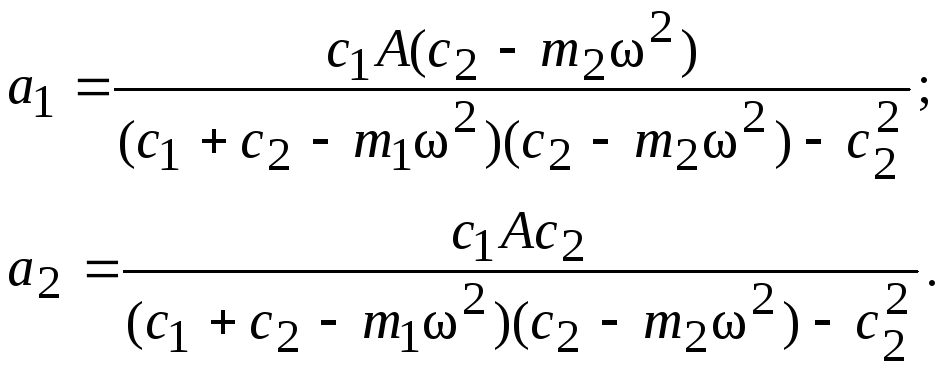
В частном случае, когда с2 = m2 2 = 0 амплитуды а1 и a2 имеют следующие значения:
![]()
то есть первая масса остается неподвижной, хотя возмущение приложено к этой массе. Этот эффект носит название динамического гасителя колебаний.
Приведенные соотношения позволяют провести теоретическое исследование вынужденных колебаний одномассовых и двухмассовых систем при кинематическом возбуждении, а именно рассчитать собственные частоты и амплитуды вынужденных колебаний, построить формы колебаний исследуемых систем, рассчитать параметры динамического гасителя колебаний для двухмассовой системы.
Экспериментальные исследования вынужденных колебаний механических систем
Цель: экспериментальное и теоретическое исследование вынужденных колебаний одномассовых и двухмассовых систем при кинематическом возбуждении; исследование колебаний двухмассовой системы в режиме динамического гасителя; сравнение полученных параметров с расчетными параметрами.
Используемое оборудование и приборы:
1. Вибростенд ST-1000.
2. Электронный частотомер.
3. Строботахометр.
4. Набор исследуемых объектов (возможность изменения жесткости, массы, числа степеней свободы системы).
5. Измерительные инструменты.
Общая схема экспериментальной установки представлена на рис. 2.







№1 №2 №3






5

23233243 4 6




































3 2 1















Рис. 2.
Схема экспериментальной установки.
Блок управления 1позволяет формировать гармонический электрический сигнал нужной частоты и амплитуды, что осуществляется поворотом соответствующих ручек на БУ (см. инструкцию по эксплуатации вибростенда). Электромагнит 2 передает заданный на блоке управления гармонический сигнал на рабочий стол 3. Рабочий стол 3 позволяет с помощью дополнительных креплений разместить на нем исследуемые объекты, и таким образом, реализовать кинематическое возбуждение. Электронный частотомер 4 предназначен для более точного и удобного при проведении эксперимента наблюдения за частотой внешнего возбуждения.
Строботахометр 5позволяет визуально зафиксировать форму движения исследуемого объекта (частоту колебаний).
На рис. 2 приведены различные варианты систем (№ 1, 2, 3) с конечным числом степеней свободы, которые могут быть изменены по решению преподавателя. В случае исследования систем с распределенными параметрами вместо рамки 6на вибростоле3будут размещаться балочные системы (рис. 3, 4).
Е, J, l,



консольная балка
3
Рис. 3.
E,J, l, ρ
Рис. 4.
Варианты закрепления балок могут быть различными, что отразится лишь на рабочей части практикума. Схема экспериментальной установки и порядок проведения исследований остаются одинаковыми во всех случаях.