

Adaptive Control System
.pdf$ $
M
! " ! "
J
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# |
|
|
|
|
|
# |
|
$ |
|
|
! " |
|||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
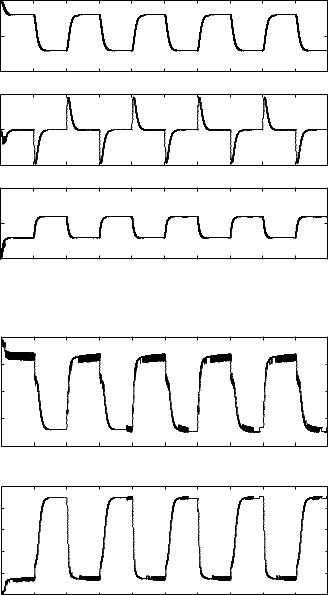
X1 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
−5 |
|
|
|
|
|
|
|
|
|
|
−10 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
0 |
||||||||||
|
|
|
|
|
X2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
−2 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
0 |
||||||||||
|
|
|
|
|
X3 |
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
0 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
0 |
||||||||||
|
|
|
|
|
Time (s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
−5 |
|
|
|
|
|
|
|
|
|
|
−10 |
|
|
|
|
|
|
|
|
|
|
−15 |
|
|
|
|
|
|
|
|
|
|
−20 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
0 |
||||||||||
|
|
|
|
|
U2 |
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
0 |
20 |
40 |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
0 |
||||||||||
|
|
|
|
|
Time (s) |
|
|
|
|
|

$ |
# # |
|
|
% |
|
# |
|
# ! "& # ! |
|
# |
|
# ! "& |
|
|
|
|
|
||||||||
$ # # |
|
|
|
|
|
|
|
|
||||
$ $ # % # ! "& # % # ! "&
$ ! "
$ ! " # % ! # " # ! "&
$ ! # "
|
J |
|||
|
|
|
|
|
$ |
|
$ |
$ |
|
$ $
$
$
$
$
|
|
|
|
|
|
|
|
|
|
|
|
# |
|
|
|
|
|
|
|
|
|
! |
# |
" # |
|
||
|
|
|
$ |
|
|
! # " # |
|
||||||
|
|
||||||||||||
|
|
|
|
# |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
! "
"
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
% |
|
! " |
|
|
! |
"& |
|
$ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
! " $ |
! " |
|
|
|
! " $ |
! " |
|
||||||||||||||||
! " |
|
|
! " |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
! |
|
# |
|
|
" |
|
|
! |
|
# |
|
|
" |
|
|
|
|
|
|
% & |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
$ |
|
|
|
|
|
|
$ |
|
|
J |
|
|
|
|
|||||||||||||||||||
|
$ |
# |
|
|
$ |
# |
|
|
|
|
|
|||||||||||||||||||||||

J
$ % & "
|
|
|
|
$ % & |
J
J
J $
|
|
|
||||||
$ |
|
|
$ |
$ |
|
$ $ |
|
$ |
J
|
|
|
|
|
|
$ |
|
|
$ $ |
||||||
$ $ |
$ |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
$ |
||||||||
$ |
|
|
|
|
|
|
|||||||||
$ $
J
$ $
! " ! "
M
J
J $
J
|
|
|
|
|
|
|
||
|
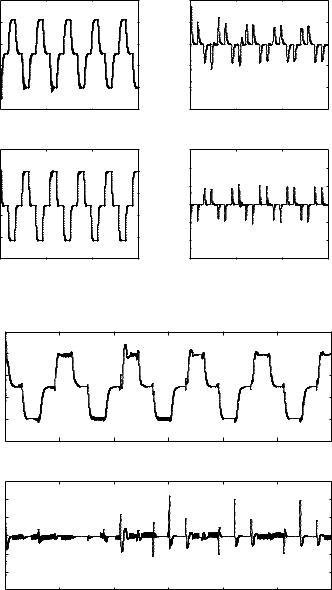
Theta_1 |
|
|
Theta_2 |
|
|
||
4 |
|
|
|
1 |
|
|
|
|
3 |
|
|
|
0.5 |
|
|
|
|
2 |
|
|
|
0 |
|
|
|
|
1 |
|
|
|
−0.5 |
|
|
|
|
0 |
|
|
|
−1 |
|
|
|
|
−1 |
100 |
200 |
300 |
−1.5 |
100 |
200 |
300 |
|
0 |
0 |
|
||||||
|
Theta_3 |
|
|
Theta_4 |
|
|
||
1 |
|
|
|
3 |
|
|
|
|
0 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
−2 |
|
|
|
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
−3 |
|
|
|
−2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
−4 |
100 |
200 |
300 |
−3 |
100 |
200 |
300 |
|
0 |
0 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Tau_1 |
|
|
|
|
30 |
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
−10 |
|
|
|
|
|
|
|
|
−20 |
50 |
|
100 |
150 |
200 |
250 |
300 |
|
0 |
|
|
||||||
|
|
|
|
Tau_2 |
|
|
|
|
20 |
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
−5 |
|
|
|
|
|
|
|
|
−10 |
50 |
|
100 |
150 |
200 |
250 |
300 |
|
0 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
M
M
M
M
M
M
M
M
M
M
M
J
M
J
M
M
L
M
M
M
M
M
M
M
M
M
J
J
M
J
M
M
J
J
M
$ ! " # ! "% ! " # # ! " & ! "
$ ! " # ! " % # ! "& ! " # ! " # ! " |
! " |
$ ! " # ! " % # ! "& ! " # ! " # ! " |
! " |
|
|
|
|
$ % |
|
|
|
|
|
|
& |
|
|
|
|
|
$ |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|||||||||||
$ |
# # $ |
|
|||||||||||||||||||||||||||||||
|
$ % |
|
|
$ % |
|
|
& |
|
|
|
|
$ |
|
||||||||||||||||||||
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
$ |
|
|
|
||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
$ $ |
||||||||||||||||||||||||||||||
! " ! " ! "
! " $ J
$
% "
! # " ! "
! "
$