

A10-262
.pdfМинистерство Образования РФ
Московский Государственный Индустриальный Университет МГИУ
Динамика механической системы
Методическая разработка к выполнению расчетно-графической работы
по динамике механической системы
А10-262
Москва 2004
1
Методическая разработка предназначена для студентов II курса дневного отделения и студентов II курса вечернего отделения всех специальностей.
В методической разработке по выполнению расчетно-графической работы по динамике механической системы даны общие указания по решению задач динамики, дана методика решения задач динамики механической системы различными способами, а также даны указания и требования по оформлению работы. Кроме этого, приведены примеры и даны их решения.
При составлении методической разработки был использован опыт кафедры «Теоретическая механика и теория механизма».
Утверждено на заседании кафедры , протокол № 2 от 02.10.03
Составители: А.С. Дмитриев, Ю.С. Иванов, Т.А. Игнатова.
2
ОБЩИЕ УКАЗАНИЯ
Расчетно-графическая работа по динамике механической системы состоит из задачи, которую необходимо решить четырьмя различными способами. Эти способы представляют следующие темы раздела «Динамика» курса «Теоретическая механика».
Способ №1– использование теоремы об изменении кинетической энергии механической системы; Способ №2– использование дифференциальных уравнений движения,
составленных для каждого тела механической системы. Способ №3– использование общего уравнения динамики; Способ №4– использование уравнений Лагранжа II рода.
К выполнению данной работы можно приступать только после тщательной проработки теоретического материала, а также при самостоятельном решении всех домашних задач, заданных на практических занятиях.
При выполнении задания рекомендуется использовать следующую литературу:
1.Тарг С. М. «Краткий курс теоретической механики».
2.Бать М.И., Джанелидзе Г.О., Кельзон А.С. «Теоретическая механика в примерах и задачах» ч.п.
Задачу, представленную в расчетно-графической работе по динамике механической системы, необходимо решить четырьмя различными способами.
3
ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАСЧЕТНО-ГРАФИЧЕСКОЙ РАБОТЫ
1.Расчетно-графическая работа выполняется на листах формата А-4 (297*210).
2.На титульном листе необходимо указать наименование работы, раздел курса, фамилию и инициалы, шифр учебной группы, вариант задания, год выполнения работы (см. приложение).
3.В задаче должен быть приведен полностью текст условия, а также составлено краткое условие задачи со всеми необходимыми цифровыми данными ( Дано: … Найти: …).
4.Рисунки и схемы выполняются карандашом. На рисунках не должно быть цифровых данных – только буквенные обозначения.
5.При решении задачи необходимо приводить пояснения и ссылки на используемые аксиомы, законы, теоремы, принципы и положения. Необходимо оставлять поля для замечаний и вопросов преподавателя.
6.Все уравнения, теоремы и принципы механики, а также решения задачи необходимо проводить в общем виде в буквенных обозначениях. Цифровые данные подставлять только при определении неизвестных.
7.Расчеты производить с точностью до трех значащих цифр после запятой.
8.В работе должен быть приведен анализ и исследование полученных в ходе решения задачи результатов, сделаны необходимые выводы и приведены ответы.
9.В конце работы ставится дата выполнения и подпись. В случае необходимости приводится список используемой литературы.
4

ПЕРВЫЙ СПОСОБ: ИСПОЛЬЗОВАНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ ГРУЗА 1.
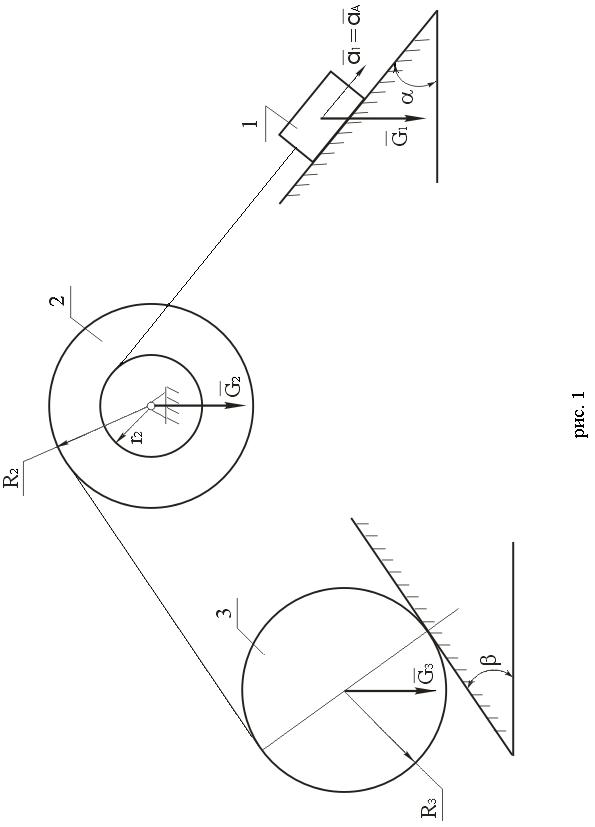
1.Изображаем механическую систему в исходном состоянии с учетом соотношений размеров тел, составляющих систему. Углы изображаются с помощью транспортира. (рис.1 - заданная схема).
2.Выписываем полное условие задачи. На основе полного условия составляем краткое условие, в котором приводим все цифровые данные задачи.
Механическая система (см. рис.1) состоит из трех абсолютно твердых тел: груза 1, двухступенчатого составного барабана 2 и сплошного однородного цилиндрического катка 3. Тела между собой соединены невесомыми нерастяжимыми нитями. Ускоренное перемещение груза 1 по
шероховатой наклонной плоскости, образующей угол с горизонтом вызывает вращение составного барабана 2 вокруг неподвижной горизонтальной оси. Вследствие вращения барабана каток 3 катится без скольжения вверх по шероховатой наклонной плоскости образующей угол
с горизонтом при наличии трения качения. Даны веса тел ( G1 ,G2 ,G3 ),
размеры ( R1, R2, r2, R3), радиус инерции барабана 2, коэффициент трения скольжения груза f1 и коэффициент трения качения катка k3. Определить ускорение груза I.
Дано: |
|
|
|
G1 |
= 400 н; |
R1 =0,20 м; |
f1=0,12; |
G2 |
= 100 н; |
R2 =0,15 м; |
k3=0,0025 м; |
G3 |
= 250 н; |
r2=0,10 м; |
g = 9,81 м/с2 |
= 60о; |
R3 =0,25 м; |
|
|
=30o; |
2 = 0,18 м; |
|
|
Найти: |
аA ? |
|
|
3. Производится анализ движения тел, входящих в механическую систему. (см. рис.1)
Тело 1 – груз, совершает поступательное движение; Тело 2 – блок, совершает вращательное движение;
Тело 3 – каток, совершает плоскопараллельное движение.
5
6

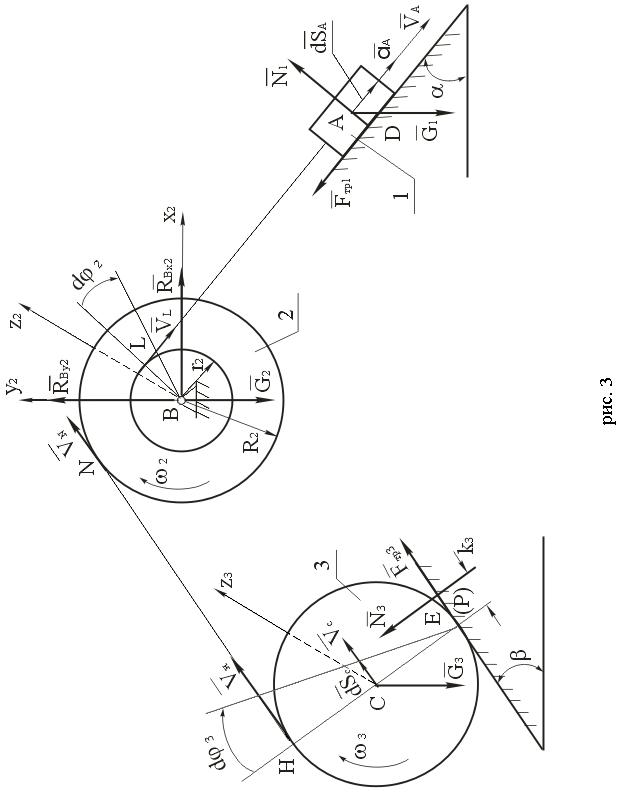
4. Изображаем механическую систему в целом в произвольный момент времени (рис. 2).
Выявляем, описываем и изображаем на чертеже все силы, которые действуют на механическую систему и определяем их точки приложения.
Активные силы:
G1 - сила тяжести груза 1 приложена в точке А;
|
|
|
|
|
|
G2 |
- сила тяжести груза 2 приложена в точке В; |
||
|
|
|
|
|
G3 |
- сила тяжести груза 3 приложена в точке С. |
|||
Согласно аксиоме освобождаемости от связей рассматриваются силы реакций связей:
N1 – нормальная реакция плоскости груза 1, приложенная в точке Д;
Fтр1 – сила трения скольжения груза 1 о плоскость, приложенная
в точке Д;
RBX 2 ,RBY2 – составляющие реакции неподвижного цилиндричес-
кого шарнира, приложены в точке В;
N3 – нормальная реакция плоскости на каток приложена
в точке Е, отстоящей от точки (Р) на величину коэффициента трения качения k3;
Fтр3 – сила трения скольжения катка 3 о плоскость, приложена в точке (Р).
5. Записываем уравнение, определяющее 1-ый способ решения задачи – теорему об изменении кинетической энергии системы.
Для определения ускорения груза 1 удобнее использовать теорему об изменении кинетической энергии в дифференциальной форме.
dT dA e dAi |
, или |
dT |
|
dAke |
|
dAk i |
|
|
|
|
|||||
k |
k |
|
dt |
|
dt |
|
dt |
|
|
|
|
|
|||
где Т – кинетическая энергия системы,
dAke – элементарная работа kой внешней силы, dAki - – элементарная работа kой внутренней силы.
7

6. Определяем кинетическую энергию системы.
Кинетическая энергия системы складывается из кинетической энергии тел, составляющих систему.
Т= Тк
Для данной задачи Т=Т1 +Т2 +Т3, где Т1, Т2, Т3 – кинетическая энергия груза, блока и катка соответственно.
Кинетическая энергия груза, совершающего поступательное движение:
T1 12 M 1 VA2 12 Gg1V 2A
Кинетическая энергия блока, совершающего вращательное движение:
T1 |
1 |
J Z 2 22 |
, где J Z 2 |
|
G2 |
22 |
|
2 |
g |
||||||
|
|
|
|
|
здесь 2 – радиус инерции блока 2 относительно оси z2 (см.рис.2).
Угловая скорость блока 2 определяется из формулы:
V = h , |
|
V |
|
|
h |
||||
|
|
|||
для данного случая (см. рис. 2) V VL VA , |
h r2 |
|||
тогда |
|
|
VA |
. |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||
|
|
r2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
G2 |
2 |
|
V 2A |
Тогда |
|
T 2 |
|
|
|
|
2 |
|
r22 |
||
|
2 |
g |
|||||||||
|
|
|
|
|
|
|
|
|
|||
8
9

Кинетическая энергия катка, совершающего плоскопараллельное
|
T 3 |
1 |
M 3V C2 |
|
|
1 |
J Z3 32 |
движение |
2 |
3 |
2 |
||||
|
|
|
|
|
|
где M 3 Gg3
JZ3 - момент инерции тела относительно оси z3, проходящей через центр масс, для катка - сплошного однородного (см. рис.2).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J Z3 |
|
|
1 G3 |
R |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 g |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Выразим скорость точки С и 3 через V A (см. рис. 2): |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
V C |
|
1 |
|
|
V H |
|
1 |
|
|
V N |
|
|
1 |
|
|
|
R |
1 |
|
V A |
|
R2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
2 |
|
r2 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 V C |
1 |
|
|
|
|
|
|
R2 |
|
|
|
VA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
Это получено исходя из того, что мгновенный центр скоростей катка |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
находится в точке P (см. рис. 2). |
||||||||||||||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
G3 |
|
1 |
|
|
|
R22 |
|
|
|
|
|
2 |
|
|
|
1 |
|
|
1 |
|
|
|
|
G3 |
|
|
2 |
|
|
1 |
|
|
|
|
R22 |
|
|
|
|
2 |
|
|
|
3 |
|
G3 |
|
R22 |
2 |
||||||||||||||||||
T 3 |
|
|
|
|
|
|
|
|
|
V A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
|
V A |
|
|
|
|
|
|
|
|
V A |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R32 |
r22 |
|
|
|
|
r22 |
|||||||||||||||||||||||||||||||||||||||||||
|
|
2 g 4 |
|
|
r22 |
|
|
|
|
|
|
|
|
|
|
|
2 2 g |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
16 g |
|
|
||||||||||||||||||||||||||||||||||||
|
|
Сложив кинетические энергии тел, получим кинетическую энергию |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
системы в произвольный момент времени: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
G1 |
|
|
|
G2 |
|
|
22 |
|
|
|
3 |
|
|
G3 |
R22 |
|
|
2 |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V A |
|
|
M ПРV A |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
g |
|
|
|
|
g |
|
|
|
|
r |
|
|
|
|
|
8 |
|
|
|
|
g |
|
|
|
2 |
|
|
|
2 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
М ПР |
|
G1 |
|
G2 |
|
|
|
|
22 |
|
3 |
|
G3 |
|
|
R22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r22 |
|
|
|
|
|
|
|
|
|
|
|
r22 |
приведенная масса системы. |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
g |
|
|
g |
|
|
|
8 |
|
|
g |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
Это обозначение введено для уменьшения громоздкости дальнейших преобразований.
10