

ЛАБ.РАБ / lab_4
.pdf
|
|
Лабораторная работа ¹ 4. |
|
|
|
|
|||||
|
ИЗУЧЕНИЕ ЗАКОНОВ КОЛЕБАНИЙ ПРИ ПОМОЩИ |
|
|||||||||
|
МАТЕМАТИЧЕСКОГО И ОБОРОТНОГО МАЯТНИКОВ. |
||||||||||
|
I. Цель работы: определение ускорения свободного |
||||||||||
падения по периоду колебаний математического и оборотного |
|||||||||||
физического маятников. |
|
|
|
|
|
|
|
|
|||
|
II. Описание установки. |
|
|
|
|
|
|
|
|||
|
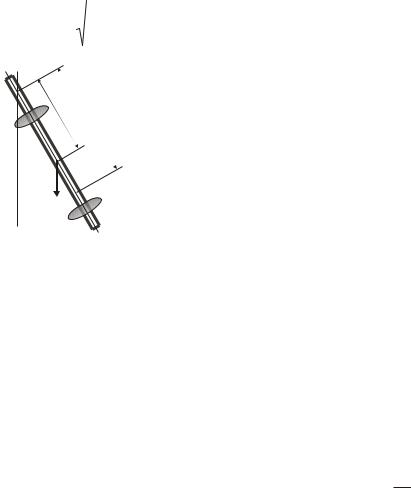
Общий вид универсального маятника представлен на |
||||||||||
рисунке. К основанию прибора закреплена колонна 1, на которой |
|||||||||||
зафиксирован верхний кронштейн 2 и нижний кронштейн 3 с |
|||||||||||
фотоэлектрическим датчиком 4. С одной стороны кронштейна 2 |
|||||||||||
находится математический маятник 5, с другой - оборотный |
|||||||||||
маятник 6. |
|
|
|
|
|
|
|
|
|
||
|
Длину математического маятника можно регулировать с |
||||||||||
|
7 |
8 |
помощью воротка 7, и измерять с |
||||||||
|
помощью шкалы на колонне 1. |
||||||||||
|
|
|
Оборотный маятник выполнен в |
||||||||
|
2 |
|
âèäå |
стального |
стержня, |
íà |
|||||
|
9 |
котором |
фиксированы |
äâà |
|||||||
|
|
||||||||||
|
|
|
повернутые |
äðóã |
ê |
другу |
|||||
|
1 |
6 |
лезвиями ножа 8 и два ролика 9. |
||||||||
|
|
Íà |
стержне |
через |
10 |
ìì |
|||||
|
|
8 |
нанесены |
кольцевые |
нарезки, |
||||||
|
|
служащие |
äëÿ |
|
точного |
||||||
|
|
|
определения |
длины |
оборотного |
||||||
|
|
9 |
маятника. Ножи и ролики можно |
||||||||
5 |
3 |
перемещать вдоль оси стержня и |
|||||||||
|
|||||||||||
4 |
фиксировать в любом положении. |
||||||||||
|
|||||||||||
|
|
|
Нижний кронштейн вместе с |
||||||||
|
|
|
|
||||||||
|
|
|
фотоэлектрическим |
датчиком |
|||||||
|
|
|
òîæå |
можно |
перемещать вдоль |
||||||
|
|
|
колонны |
è |
фиксировать |
â |
|||||
|
|
|
произвольно |
|
|
избранном |
|||||
|
|
|
положении. |
|
|
|
|
|
|||

2
III. Методика измерений и расчетные формулы. Возможность определения ускорения свободного падения
g по периоду колебаний математического маятника основана на том, что период гармонических колебаний математического маятника зависит только от его длины a и от ускорения свободного падения согласно формуле
a
T = 2π |
|
. |
(1) |
|
|
||||
|
|
g |
|
|
Следует помнить о том, что данная формула справедлива только в том случае, когда на маятник действует единственная внешняя силасила тяжести. Так, если точка подвеса маятника участвует в некотором ускоренном движении, то наличествует еще одна внешняя силасила инерции.
Измерив длину математического маятника и период малых
колебаний T, можно рассчитать ускорение свободного падения 4π2 a
по формуле: g = |
|
. |
|
||
|
T 2 |
|
Âэтих формулах a- расстояние от оси колебаний до центра масс колеблющегося тела (шарика).
Âусловиях данного опыта нельзя пренебречь размерами шарика (d) при определении длины маятника и считать ее равной
длине нити l. Разница (a − l = d / 2) дает относительную погрешность того же порядка, что и приборная погрешность определения T и на порядок больше приборной погрешности измерения a.
В то же время на установке можно подобрать такую длину нити l, которая позволяет пользоваться приближенной формулой при расчете момента инерции, т.е. считать J = ma2 , как для материальной точки.
Чтобы исключить ошибки при определении à, связанные с неоднородностью шарика, искажением его формы и невозможностью достаточно точно определить положение оси колебаний, следует проделать два опыта с разной длиной à1 è à2 , определить соответствующие периоды Ò1 è Ò 2 и затем рассчитать g по разности ( a2 − a1 ) è (Ò 22 −Ò12 ).
Из формулы (1) получаем:
3
Ò12 |
= |
4π |
2 à |
; |
T22 |
= |
4π2 a |
2 |
. |
|
|
|
|
|||||
|
|
|
|
1 |
|
|
|
|
|
|||||||||
|
g |
|
g |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Таким образом, ускорение свободного падения равно: |
||||||||||||||||||
g = |
4π2 ( a |
2 |
− a ) |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
1 |
. |
|
|
|
|
|
|
|
(2) |
||||
|
|
2 −T |
2 ) |
|
|
|
|
|
|
|
||||||||
|
|
|
(T |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|||
При малых колебаниях физический маятник совершает |
||||||||||||||||||
гармонические колебания с периодом |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T = 2π |
|
|
L |
, |
|
|
|
|
|
|
|
|
|
|
(3) |
|||
|
|
g |
|
|
|
L- приведенная |
|
|||||||||||
|
|
|
|
|
|
|
|
ãäå |
длина |
физического |
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
маятника: L = |
J |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
. |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
0 |
|
a |
|
|
L |
|
|
|
|
|
|
|
ma |
|
|
|||
|
|
|
|
|
|
|
|
|
Введены обозначения: m- масса маятника, |
|||||||||
|
|
|
|
|
|
|
|
|
a- расстояние между точкой подвеса 0 и |
|||||||||
|
|
|
|
|
|
|
|
|
центром масс Ñ маятника (см. рис.). |
|||||||||
C |
|
|
|
|
|
|
|
|
|
|
Точка 0′, находящаяся на расстоянии |
|||||||
mg |
|
0′ |
|
|
|
|
|
приведенной длины L от точки подвеса, |
||||||||||
|
|
|
|
|
|
|
называется |
центром |
качания |
физического |
||||||||
|
|
|
|
|
|
|
|
|
маятника. Оказывается что всегда L > a. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
Точка |
подвеса 0 |
и центр качания 0′ |
|||||
обладают свойством взаимозаменяемости: если ось подвеса сделать проходящей через центр качания, то прежняя точка подвеса станет центром качаний, а период колебаний физического маятника не изменится.
В процессе выполнения работы следует определить экспериментально положение центра качания, а также приведенную длину физического маятника.
IV. Порядок выполнения работы.
Задание I. Определение g с помощью математического маятника.
1. Рассчитать минимальную длину маятника a min , начиная с которой момент инерции можно рассчитывать по приближенной
формуле J = ma2 , пренебрегая слагаемым J 0 = 1 md 2 .
10
4
Приборные погрешности в данной работе дают относительную
погрешность |
результата εï ðèá = 0,01 (т.е. 1%), поэтому |
|||
достаточно потребовать, чтобы |
||||
|
J |
|
d 2 |
|
εJ = |
|
= 0,1 |
|
= 0,001, |
J |
|
|||
|
|
a2min |
||
т.е. была на порядок меньше, чем εï ðèá (d- диаметр шарика).
Åñëè a > a min , то погрешность пренебрежительно мала и маятник можно считать математическим.
2.Выбрать два значения a1 > a min è a2 > a min так, чтобы разность (a1 − a2 ) была максимальной. Выбор a1 − a2 согласовать
ñпреподавателем.
3.Установить нижний кронштейн вместе с фотоэлектрическим датчиком в нижней части колонки так,
чтобы черта на корпусе датчика соответствовала выбранному a1 на шкале колонки. Затянуть вороток, фиксируя датчик в
избранном положении.
4.Поворачивая верхний кронштейн, поместить над датчиком математический маятник.
5.Вращая вороток на верхнем кронштейне, установить длину математического маятника так, чтобы черта на шарике была продолжением черты на корпусе фотоэлектрического датчика.
6.Нажать переключатель "Сеть", проверяя, все ли индикаторы измерителя показывают цифру нуль и горит ли лампочка датчика.
7. Привести математический маятник в движение, отклонив шарик на 4 −50 от положения равновесия.
8.Нажать кнопку "Сброс".
9.После подсчета измерителем 9 периодов нажать клавишу
"Стоп". Снять показания прибора (n- число периодов и t1 - время колебаний).
10.Измерения t1 , повторить 3 - 5 раз при одинаковом числе n колебаний.
11.Переместить нижний кронштейн в положение, соответствующее выбранной длине a2 .
5
12.Установить длину a2 , вращая вороток на верхнем кронштейне.
13.Провести измерения t2 ïî ï.ï. 7 - 10.
Задание 2. Определение g с помощью оборотного маятника.
1.Повернуть верхний кронштейн на1800 .
2.Зафиксировать ролики несимметрично таким образом, чтобы один из них находился вблизи конца стержня (4 - 5 см от конца), а другойвблизи его середины.
3.Ножи маятника закрепить по обеим сторонам центра тяжести системы, полученной по выше указанному способу таким образом, чтобы они были обращены лезвиями друг к другу. Один из них поместить вблизи свободного конца стержня (4 - 5 см от конца), а второйвблизи середины расстояния между роликами.
4.Проверить, отвечают ли грани лезвий ножей нарезкам на стержне.
5.Закрепить маятник на вкладыше верхнего кронштейна на крайнем ноже.
6.Нижний кронштейн с датчиком переместить таким образом, чтобы стержень маятника пересекал оптическую ось.
7.Отклонить маятник на 4 −50 от положения равновесия и отпустить.
8.Нажать клавишу "Сброс".
9.После подсчета измерителем 9 полных колебаний нажать
кнопку "Стоп". Записать t2 .
ВНИМАНИЕ! Если время 10 колебаний t2 >13,5 ñ èëè t2 <12,0 с, то необходимо изменить приведенную длину маятника, немного переместив верхний ролик.
10.Добившись выполнения условия 12,0 с≤ t2 ≤ 13,5 с, повторить измерение времени t2 не менее 3- 5 раз. Найти ( t2 )ñ ð и период T2 оборотного физического маятника.
11.Рассчитать приведенную длину L, используя формулу
(3)и полагая g =10ì / ñ2 .
12.Поместить второй нож на расстоянии Lрасч. от первого.
13.Снять маятник и, перевернув, закрепить его на втором
íîæå.

6
14.Нижний кронштейн с фотоэлектрическим датчиком переместить так, чтобы маятник пересекал оптическую ось.
15.Отклонить маятник на 4 −50 от положения равновесия, измерить период Ò и сравнить результат с ранее полученной
величиной Ò 2 : åñëè Ò > T2 , то второй нож надо переместить в направлении ролика, находящегося на конце; если же T < T2 - в направлении середины стержня.
16.Повторно измерить T и сравнить с T2 . Изменять положение второго ножа до момента получения равенства T = T2
ñточностью до 0,5%,т.е. T −T2 = 0,005.
T2
17. Определить приведенную длину L оборотного маятника, определив расстояние между ножами.
V. Таблицы измерений. |
|
|
|
||||||
Задание 1. |
|
|
|
d = |
|
a min = |
|||
1. Диаметр шарика |
; |
||||||||
2. Первый опыт. |
|
|
|
|
|||||
Число колебаний: n =10 |
|
|
|
||||||
Длина нити: a1 |
= |
; a1 |
= |
|
|
||||
Время колебаний: |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
¹ опыта |
|
|
|
|
t1 |
|
t1 |
||
|
|
|
|
|
|
|
|
|
|
Среднее значение |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
( t1 )ï ðèá = |
|
|
|
|
|
|
|
||
Расчет: ( t1 )ñë. = |
; t1 = L ± L |
||||||||
Период колебаний : |
|
|
|
||||||
T = |
t1 |
; |
T = |
|
t1 |
; T = L ± L |
|||
|
|
|
|||||||
1 |
n |
1 |
|
n |
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
3. Второй опыт оформить аналогично, записав результаты измерений в виде :

|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
t2 |
= L ± L; T2 = L ± LÒ2=…±… |
|
|
|
|
|||||||||
Задание 2. |
|
|
|
|
|
|
|
|
|
|
|
|||
1. |
Время 10 колебаний. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¹ опыта |
|
|
t2 |
|
|
|
|
Dt2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Среднее значение |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
Период колебаний : |
|
|
|
|
|
|
|
|
|
||||
T2 = |
t2 |
; DT2 = |
Dt2 |
; T2 = L ± L |
|
|
|
|
||||||
|
|
|
|
|
|
|||||||||
|
|
n |
n |
|
|
|
|
|
|
|
|
|
||
3. |
Приведенная длина (расчет на основе T2 ): Lðàñ÷.= |
|||||||||||||
4. |
Период после оборота маятника: T = L ± L |
|||||||||||||
Точность выполнения равенства T = T2 : |
|
|
T -T2 |
|
|
= |
||||||||
|
|
|||||||||||||
|
|
|||||||||||||
|
|
|
|
|
|
|||||||||
5. |
|
|
|
|
|
|
|
|
|
|
T2 |
|||
Приведенная длина (расстояние между ножами). |
||||||||||||||
|
|
|
L = ; DL = ; |
L = L ± L |
|
|
|
|
||||||
VI. Обработка результатов измерений. Задание 1.
1.По формуле (2) рассчитать g.
2.Определить погрешность Dg по формуле:
Dg 2 ×Dp Da + Da 2(T ×DT + T ×DT )
= + 1 2 + 2 2 1 1 .
g |
p |
a - a |
2 |
T |
2 |
-T 2 |
|
|
1 |
|
2 |
1 |
3. Записать окончательный результат измерений:
g = L ± L

8
Задание 2.
1.Используя формулу (3), определить ускорение
свободного падения: g = 4p2 L .
T 2
2. Определить погрешность gD по формуле:
Dg 2 ×Dp DL 2 ×DT
|
= |
|
+ |
|
+ |
|
. |
|
|
|
|
||||
g |
p |
L |
T |
||||
3.Записать окончательный результат измерений: g = L ± L
4.Сравнить полученные значения ускорения свободного
падения с истинным: g èñò. = 9,81ì / ñ2 . Погрешность определения g не должна превышать 1%. Сделать вывод о качестве проведенных экспериментов.
Контрольные вопросы.
1.Какие колебания называются гармоническими? Какова связь между угловым ускорением и угловым отклонением при гармонических колебаниях?
2.Что такое циклическая частота гармонических колебаний? От каких параметров она зависит?
3.Какие силы участвуют в создании гармонических колебаний маятника?
4.Что такое математический маятник.
5.От каких параметров системы зависит период колебаний физического маятника? математического маятника?
6.Как меняетсяr при гармоническом колебанииr вращательный момент M внешних сил? Как направлен M?
7.Что такое длина математического маятника? Можно ли в условиях проделанной работы считать ее равной длине нити?
8.Как определяется минимальная длина математического маятника, начиная с которой можно считать шарик материальной точкой?
9.Что такое приведенная длина физического маятника? Как она определялась экспериментально в работе?