

Лекция. Элементы Векторной Алгебры
.pdf§7. Уравнение плоскости в R3.
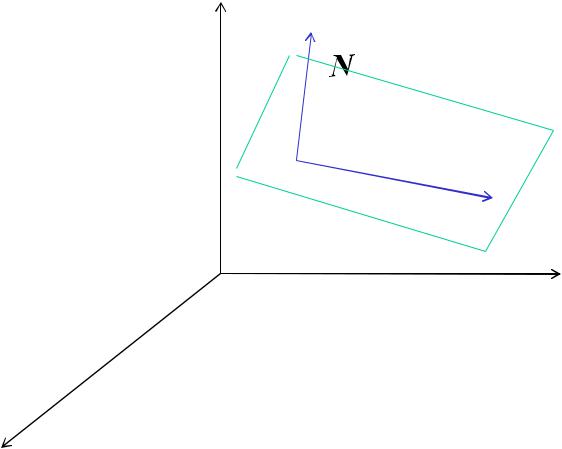
•Пусть плоскость π проходит через точку
M0(x0,y0,z0) перпендикулярно вектору
N=(A,B,C).
•Этими условиями определяется единственная
плоскость в пространстве Oxyz. Вектор
N=(A,B,C) называется нормальным вектором
плоскости.
M0 |
M |
|

•Возьмем в плоскости π произвольную точку
M(x,y,z).
•Вектор M0M=(x-x0,y-y0,z-z0) будет
перпендикулярен вектору N=(A,B,C) =>
•Скалярное произведение этих векторов равно
нулю: (N, M0M)=0, т.е. в координатной
форме: A(x-x0)+B(y-y0)+C(z-z0)=0 (7.1)
•Уравнение (7.1) представляет уравнение плоскости, перпендикулярной данному вектору N=(A,B,C) и проходящей через
данную точку M0(x0,y0,z0).
•Уравнение плоскости, записанное в виде
Ax+By+Cz+D=0
•называется общим уравнением плоскости.
•Теорема. Всякое уравнение 1-й степени (при
A2+B2+C2≠0) с тремя переменными есть
уравнение плоскости.
Исследование общего уравнения плоскости.
•1. D=0, Ax+By+Cz=0.
•Плоскость проходит через начало координат.
•2. A=0, By+Cz+D=0.
•Плоскость параллельна оси Ox.
•3. A=0, B=0, Cz+D=0 или z=-D/C.
•Плоскость параллельна плоскости Oxy.
•z=0 – плоскость Oxy.

• Уравнение плоскости в отрезках на осях:
z
ax by cz 1
(a,0,0) |
c |
|
|
|
|
(0,b,0) |
|
|
(0,0,c) |
b |
y |
|
a
x
Условия параллельности и перпендикулярности плоскостей.
•Даны две плоскости:
•П1 : A1x+B1y+C1z+D1 =0,
•П2 : A2x+B2y+C2z+D2 =0.
•Нормали к ним:
•N1 =(A1,B1,C1), N2 =(A2,B2 ,C2).

• Т 1. П1 || П2 : N1 || N2 N1= cN2
A1 B1 C1
A2 B2 C2
•Т 2. П1 _|_ П2 N1 _|_ N2 (N1*N2)=0,
т.е.
•A1A2 + B1B2+ С1С2=0.
•Пример. Написать уравнение плоскости,
проходящей через точку (3,1,-2) и параллельной заданной плоскости:
•-2x+2y+3z+1=0.
•Ответ: -2(x-3)+2(y-1)+3(z+2)=0.

•Расстояние d от точки M0(x0,y0,z0) до плоскости П: Ax+By+Cz+D=0 –
длина перпендикуляра, опущенного
из точки М0 на плоскость П.
• Теорема. |
|
| A x0 |
B y0 |
C z0 D | |
|
|
d |
||||
|
|
|
|
|
|
|
|
|
|
|
|
A2 B2 C2

Пример.
•Написать уравнение плоскости, проходящей
через 3 заданные точки: M1(x1,y1,z1),
M2(x2,y2,z2), M3(x3,y3,z3).
•Ответ:
x1 y y1 z z1
x2 x1 |
y2 y1 |
z2 z1 |
0 |
x3 x1 |
y3 y1 |
z3 z1 |
|