

курсач ЭП
.pdfщения поля статора при f1Н; рП – число пар полюсов АД; R1, R’2, xk = x1 + x2’ –
активные и индуктивные сопротивления обмотки статора и ротора.
При отсутствии данных о параметрах схемы замещения АД R1, R’2, x1 ,
и x'2 для их расчета применяется, представленная ниже, приближенная мето-
дика, которая опирается на основные паспортные данные асинхронного дви-
гателя (Приложение 2):
1. Рассчитывается величина потерь в номинальном режиме
ΔP Pэ Pн 3U1фн I1н cos н Pн , |
(4.8) |
|||
где Pэ – активная электромагнитна мощность потребляемая двигателем из се- |
||||
ти в номинальном режиме; |
|
|
|
|
Pн – номинальная мощность двигателя; |
|
|
||
U1фн – номинальное фазное напряжение; |
|
|
||
I1н – номинальный фазный ток статора; |
|
|
||
cos н – номинальный коэффициент мощности. |
|
|||
2. Рассчитываются полные потери мощности |
|
|||
ΔP ΔP ΔP ΔP |
, |
(4.9) |
||
1 |
2 |
мех |
||
P1 – потери мощности в статорной цепи двигателя;
P2 – потери мощности в роторной цепи двигателя;
Pмех – механические потери мощности.
3. Рассчитываются суммарные потери в роторной цепи и механические потери
ΔP2 ΔPмех |
Pэл н Pн |
Mэл нω0 Pн , |
(4.10) |
где M эл н 1,05 Pн ωн – электромагнитный номинальный момент двигателя; |
|||
н – номинальная угловая скорость двигателя; |
|
||
0 – угловая скорость идеального холостого хода двигателя. |
|
||
4. Рассчитываются потери в статорной цепи |
|
||
ΔP ΔP ΔP ΔP . |
(4.11) |
||
1 |
2 |
мех |
|
5. На основании величины потерь в статорной цепи рассчитывается ак-
тивное сопротивление статора
31
|
|
ΔP |
, |
|
|
||||
R1 |
|
|
|
1 |
|
(4.12) |
|||
3I |
|
2 |
|||||||
|
|
|
1н |
|
|
|
|||
|
|
|
|
|
|
|
|
||
6. На основании данных режима короткого замыкания асинхронного |
|||||||||
двигателя рассчитывается приведенное активное сопротивление ротора |
|||||||||
R2' |
|
M |
п |
ω |
|
||||
|
|
|
|
|
0 |
, |
(4.13) |
||
|
|
3I |
2 |
|
|||||
|
|
|
п |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
где Mп = mп Mн – пусковой момент двигателя;
где mп M п M н – отношение пускового момента АД к номинальному;
Iп – пусковой ток двигателя.
7. На основании данных режима короткого замыкания асинхронного двигателя рассчитывается индуктивное сопротивление короткого замыкания
x |
U12нф |
R |
R' |
2 . |
(4.14) |
|
|||||
к |
I 2 |
1 |
2 |
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
8. Индуктивные сопротивления статора и ротора принимаются при- |
|||||
ближенно одинаковыми по величине |
|
|
|
|
|
x1 x'2 xк  2 .
2 .
9.Индуктивные сопротивления x1 x'2 L 1 0 эл.н , x L12 0 эл.н .
10.0эл.н 2f1н – электрическая скорость вращения поля статора при но-
минальной частоте f1н.
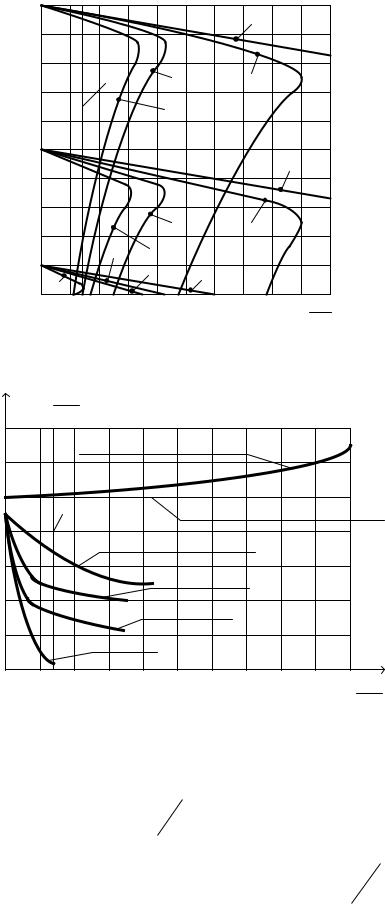
Влияние законов регулирования напряжения на вид механических ха-
рактеристик при частотном регулировании рассмотрим на примере электро-
двигателя ЭПЧ-3, технические характеристики и экспериментально опреде-
ленные параметры схемы замещения которого, приведены в табл. 4.3, меха-
нические характеристики и зависимости потокосцепления от нагрузки
при различных законах регулирования приведены на рис. 4.4.
32
Таблица 4.3
Название параметра |
Тип электрического двигателя |
|
ЭПЧ-3 |
||
|
|
Рн ,кВт |
3,0 |
||||||
|
f1 , Гц |
400 |
||||||
Номинальные данные |
n ,об |
мин |
12000 |
|||||
|
||||||||
|
c |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
U н ,В |
220 |
||||||
|
М н ,Н м |
2,5 |
||||||
|
mп |
|
М п |
|
1,2 |
|||
|
М н |
|||||||
|
|
|
|
|
||||
|
mk |
|
|
М k |
|
2,6 |
||
Механическая характеристика |
|
М н |
||||||
|
|
|
|
|||||
|
I * |
|
Iн |
|
5,0 |
|||
|
|
|||||||
|
п |
|
|
|
Iп |
|
||
|
|
|
|
|
|
|||
|
Sн ,% |
2,8 |
||||||
|
Sk ,% |
13,5 |
||||||
|
КПД |
0,81 |
||||||
Энергетические показатели |
|
|
|
|
|
|
|
|
(номинальный режим) |
|
|
|
|
|
|
|
|
|
сos 1 |
0,8 |
||||||
|
|
|
||||||
|
x ,Ом |
17 |
||||||
|
|
|
||||||
|
R1 ,Ом |
0,31 |
||||||
|
|
|
||||||
Параметры схемы замещения |
x1 ,Ом |
1,2 |
||||||
|
|
|
||||||
|
R2' ,Ом |
0,32 |
||||||
|
|
|
||||||
|
x'2 ,Ом |
1,1 |
||||||
|
|
|
|
|
|
|
|
|
33
|
f * ( f1 / f1H ) |
|
|
|
|
Sa |
|
|
|
|
|
1 |
|
|
|
0,8 |
н |
|
|
|
|
0,2 |
|
|
3 |
|
2 |
|
|
|
|
|
|
|
|
|
|
||
0,6 |
|
4 |
|
|
|
0,4 |
|
|
|
|
|
|
|
||
0,4 |
|
|
|
|
1 |
|
|
|
|
|
|
|
0,6 |
|
|
|
|
3 |
|
2 |
|
|
|
0,2 |
|
|
|
|
0,8 |
|
|
|
|
|
|
|
|
||
|
2 |
4 |
|
|
|
|
|
|
4 |
3 |
1 |
|
|
|
|
|
|
|
|
|
M 1,0 |
|
|
0 |
1 |
2 |
3 |
4 |
|
|
|
|
|
|
|
|
|
M н |
а) |
|
|
|
|
|
|
|
|
Рис. 4.4 а. Механические характеристики ЭПЧ-3 |
|||||||
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1( f * 1; f * 0,5; f * 0,1 ) |
|
|
|||
1 |
|
|
н |
|
2( f * |
1; f * 0,5; f * 0,1 ) |
|
||
|
|
|
|
|
|||||
|
|
|
|
|
3( f * |
1; f * 0,5; f * 0,1 ) |
|
|
|
0,8 |
|
|
|
|
|
4( f * |
1 ) |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
4( f * 0,5 ) |
|
|
||
0,6 |
|
|
|
|
4( f * 0,1 ) |
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
M |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
M н |
б) |
|
|
|
|
|
|
|
|
|
|
0 |
– потокосцепление АД в режиме холостого хода |
||||||||
|
|
|
|
|
|
|
|
Рис. 4.4.б. Зависимости f M |
при различных законах управления |
||||||
|
|
M н |
|
|
|
|
|
|
при: f* = 1; f* = 0,5; f* = 0,1 для двигателя ЭПЧ-3. |
||||||
1 2 |
const;2 const;3 1c |
const;4 |
U |
1 |
f |
const |
|
|
|
||||||
|
|
|
|
|
|
1 |
|
34
|
При всех законах управления, за исключением случая U1 f |
const, |
|
|
1 |
* |
f не зависит от f * , чем и объясняется независимость критического |
|
|
|
|
момента от частоты. В этом случае при уменьшении частоты механические характеристики смещаются вниз, не деформируясь. При управлении по зако-
ну U1 f1 const на низких частотах проявляется влияние падения напряже-
ния на активных сопротивлениях статора R1 , независящего от частоты.
При законах регулирования 2 |
const, const и 1c |
const |
обеспечивается высокая перегрузочная способность во всем диапазоне регу-
лирования скорости при изменении частоты f1 и обеспечивается, в разомкну-
тых системах управления, диапазон регулирования скорости до 8:1.
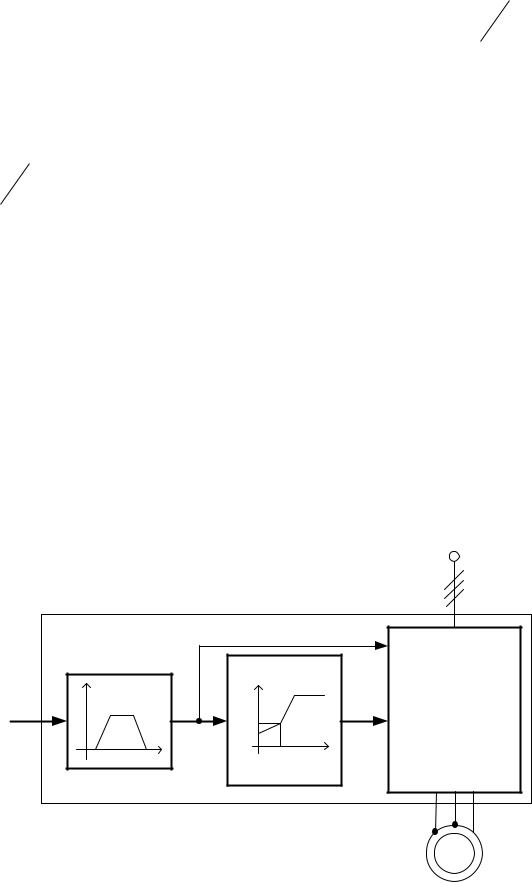
4.2.1. Разомкнутые системы скалярного управления в частотно-
регулируемом асинхронном электроприводе
При небольшом диапазоне регулирования наиболее целесообразным
является управление в разомкнутых системах (рис. 4.5).
|
ЗИ |
U |
U |
у |
|
|
t |
|
|
|
|
|
|
|
~ |
|
ПЧ |
|
U yf1 |
|
|||
U ун |
|
|
|
|
|
||
Uун |
|
ФП |
U |
ун |
ИН |
||
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
U ун0 |
U |
уf 1 |
U |
уf |
|
|
|
|
|
|
|
|
|
||
f1 var М  U1 var
U1 var
Рис. 4.5. Функциональная схема разомкнутой системы ПЧ – АД
35
В системах c ПЧ на базе автономного инвертора напряжения ИН f1 и U1
на статоре АД формируются пропорционально напряжению управления U у .
Для сохранения перегрузочной способности АД по моменту при законе час-
тотного регулирования U1 f1 const , при уменьшении f1 в функциональном преобразователе (ФП) предусматривается такое соотношение между напря-
жением управления частотой U уf 1 и напряжением U ун , при котором обеспе-
чивается компенсация падения напряжения на активных сопротивлениях об-
мотки статора. Это соотношение характеризуется нелинейной функцией, ко-
гда U ун снижается в меньшей степени, чем U уf 1 .
У большинства серийных ПЧ эта функция реализуется путем выбора в характеристике ФП двух (или нескольких) базовых координат – U ун1 при
U уf 1 |
и U у0 при U уf 0 (рис. 4.5). Первая координата определяет задание мини- |
||||
мального значения частоты |
f1 и соответствующего ей напряжения U1 на вы- |
||||
ходе |
ПЧ, |
при |
которых |
еще сохраняется равенство соотношений |
|
U1 f |
U1ном |
f |
|
. |
|
|
1 |
|
1ном |
|
|
|
На практике наименьшее значение выходной частоты преобразователя |
||||
f1 min , которая определяет достижимый диапазон регулирования скорости при
заданных пределах изменения нагрузки M c min и M c max |
соответствующие ему |
|||||||
значения U |
уf 1 |
, полезно выбрать из условия |
f1min |
0ном |
рп Sc max |
2 |
, |
при котором |
|
|
|||||||
|
|
|
|
|
|
|
||
пусковой момент двигателя будет близок моменту M c max . Здесь Sc max – сколь-
жение АД при нагрузке M c max . В этом случае зона нечувствительности по сиг-
налу управления скоростью АД будет минимальной и его движение начнется практически одновременно с началом увеличения сигнала управления.
Вторая координата выбирается с учетом уменьшения теплоотдачи за-
торможенного двигателя (режим динамического торможения) из условия ог-
раничения тока статора на уровне (0,7…0,8)I1ном. Это соответствует установке
36
выходного напряжения ПЧ при Uуf0 на уровне U1 (0,7…0,8)I1номR1,где R1 активное сопротивление обмотки статора АД.
Ограничение токов и моментов АД при пуске и торможении достигает-
ся ограничением темпа изменения U уf 1 («мягкий пуск») за счет включения в цепь управления задатчика интенсивности (ЗИ).
Недостаток разомкнутой системы – ограниченный диапазон регулиро-
вания скорости, отсутствие ограничений переменных электропривода (на-
пряжения, тока, момента) при возможных перегрузках со стороны нагрузки
или отключениях напряжений питающей сети.
4.2.2. Замкнутые системы скалярного управления
Механические характеристики АД при частотном управлении по рас-
смотренным выше законам стабилизации потокосцеплений реализуются без ограничения тока. Вместе с тем [8] при критических скольжениях и законах регулирования при стабилизации потокосцеплений 1с и 1 токи ротора
составляют примерно 70 % от тока короткого замыкания двигателя, что соот-
ветствует токам статора АД порядка (3 7)Iном. При стабилизации потокосце-
пления 2 механические характеристики не имеют критического скольже-
ния, и ток короткого замыкания I 2' кз S 1 ограничивается только активным сопротивлением ротора.
Такие токи при питании АД от преобразователя частоты (система ПЧ –
АД) недопустимы по условиям перегрузочной способности преобразователя.
Современные преобразователи частоты |
имеют |
стандартную |
|
1,5-кратную перегрузочную |
способность по |
току при |
длительности |
t = (30 60)c и 2-кратную при |
t 10 c . Поэтому критические моменты при |
||
законах регулирования 1с и 1 const, момент короткого замыкания при законе 2 const недостижимы при указанных ограничениях тока преобра-
зователей частоты.
37
Наиболее распространенными замкнутыми системами скалярного управления в промышленных электроприводах являются системы с обратной связью по току статора и обратной связью по скорости.
Вариант функциональной схемы системы частотного управления АД с обратной связью по току статора АД представлен на рис. 4.6.
|
ЗИ |
U |
U |
у |
|
|
t |
|
|
|
|
|
|
|
|
|
~ |
|
|
|
ПЧ |
|
|
|
|
|
|
U |
U |
|
f |
|
U |
d |
U уf1 |
В |
|
|
1 |
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
ФП |
|
|
|
U ун |
Ф |
|||
|
|
|
|
|
|||||
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
U d |
корректор |
|
ИН |
||
К |
|
|
|
|
|
|
|
ДТ |
f1 var |
2 |
|
|
|
|
|
|
U1 var |
||
|
|
|
|
|
|
а |
|||
Модуль |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ФПТ |
i1а |
|
компенсации |
|
|
|
|
К1 |
i1с |
ДТ |
||
скольжения |
|
|
|
ПИ |
|
|
с |
||
|
|
|
|
|
М |
АД |
|||
IR компенсация |
|
|
|
|
|||||
|
|
|
|
|
|
||||
|
|
|
U |
отс |
|
|
Imax |
|
|
|
|
|
|
|
|
|
|
|
|
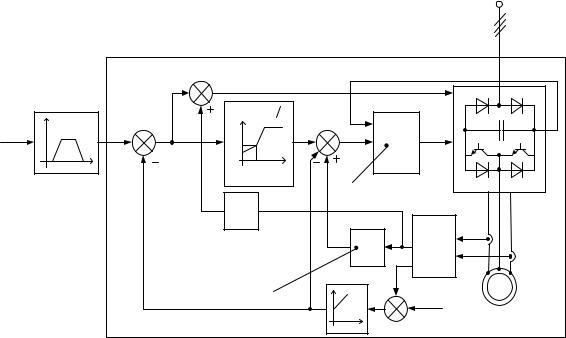
Рис. 4.6. Схема ПЧ-АД с обратной связью по току статора (IR – компенсация, компенсация скольжения)
Здесь информация о мгновенных значениях токов статора фаз А и С i1а, i1c с выходов датчиков тока ДТа, ДТс поступают на функциональный преобра-
зователь тока (ФПТ), в котором формируются выходные сигналы I1 и I1a,
пропорциональные действующим значениям тока статора и его активной со-
ставляющей.
Для защиты ПЧ и АД от перегрузок по току используется режим токовой отсечки. При I1>I1max ПИ-регулятор ограничения тока воздействует одновременно на уменьшение выходного напряжения ПЧ и частоты, что обеспе-
чивает постоянство магнитного потока, абсолютного скольжения и в итоге момента двигателя [8].
Для компенсации падения напряжения на внутренних сопротивлениях ПЧ и возможных колебаниях напряжения питающей сети в ПЧ, как источни-
38
ке напряжения используется внутренний контур стабилизации (обратная связь по Ud на входе Ud – корректора) выходного напряжения.
Одновременное воздействие обратной связи по активной составляю-
щей тока статора I1a на выходную частоту (модуль компенсации скольжения)
и напряжение ПЧ (IR-компенсация) обеспечивает стабилизацию скорости и сохранение перегрузочной способности АД по моменту. Повышение жестко-
сти механических характеристик АД позволяет увеличить диапазон регули-
рования до 10:1.
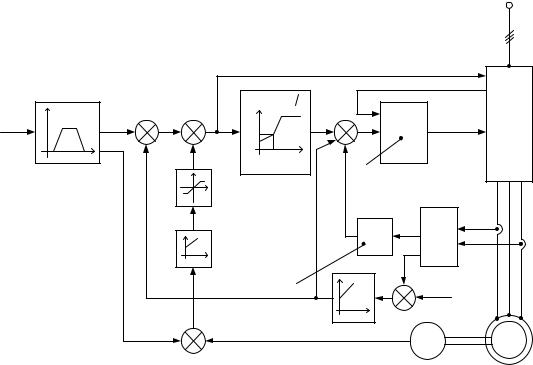
Увеличение диапазона регулирования по скорости можно добиться за счет введения в рассматриваемую систему управления (рис. 4.6) обратной связи по скорости.
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
U уf |
1 |
|
|
|
|
ЗИ |
|
|
|
U1 |
f1 |
Ud |
|
|
|
|
|
|
|
|
|
|
U зс1 |
|
|
|
|
|
ПЧ |
|||
|
|
|
|
|
|
|
|
|
|
||||
U |
U |
U |
|
U |
|
|
|
U ун |
|
|
|
||
зс |
|
|
|
|
|
(ИН) |
|||||||
|
у |
|
|
ФП |
|
|
|
|
|
||||
|
|
t |
|
|
+ |
f |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
Ud |
корректор |
|
|
|
|
||
|
|
|
|
|
БО |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UРС |
|
К1 |
I1а ФП i1а ДТа |
ДТс |
||||
|
|
|
|
|
РС |
|
Т |
i1с |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
ПИ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IR компенсация |
|
|
|
|
|
|
|
|
|
|
|
|
|
Uос |
U |
отс |
|
Imax |
|
|
|
АД |
|
|
|
|
|
|
|
|
ДС |
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
Рис. 4.7. Функциональная схема системы ПЧ-АД
собратной связью по скорости
Вэтом случае (рис. 4.7) на входе регулятора скорости РС суммируются сигналы задания на скорость Uзс с выхода ЗИ и обратной связи по скорости
Uос с датчика скорости (ДС). Выходное напряжение РС Uрс подается на звено ограничения (ЗО) и суммируется с результирующим напряжением с выхода
39
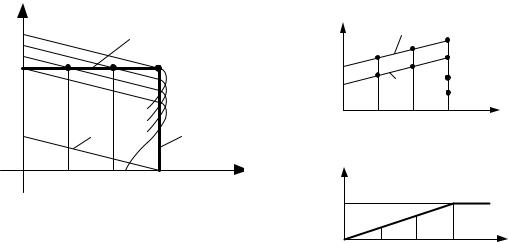
ЗИ и регулятора ограничения тока. С ростом нагрузки на валу АД (рис. 4.8 а)
за счет уменьшения скорости АД и сигнала Uос растет сигнал на входе РС
U∑ = Uзс – Uос ≡ ωоз – ω ≡ Sa, пропорциональный абсолютному скольжению двигателя. Здесь ωоз – заданная скорость идеального холостого хода АД, со-
ответствующая исходному сигналу управления Uзс; ω – фактическая скорость АД при данной нагрузке на его валу. При U∑ ≠ 0 сигнал на выходе РС сумми-
руется с сигналом Uзс1 = Uзс (при I1<I1max). В рассматриваемом случае (ПИ– регулятор скорости) за счет интегральной составляющей обеспечивается та-
кое приращение Uyf1, при котором выходная частота ПЧ становится равной f10(1+Sa), а скорость холостого хода ω01. Одновременно с ростом частоты растет и выходное напряжение ПЧ U1 по сравнению с начальным U10
(рис. 4.8 б). При этом скорость двигателя восстанавливается до заданного значения ω0З, обеспечивая получение абсолютно жесткой механической ха-
рактеристики АД (линия 1, рис. 4.8 а).
|
0 max |
|
|
|
|
|
|
U1 , f1 |
U1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
01 |
|
|
|
|
|
|
U10 |
|
|
|
|
|
|
02 |
|
|
|
|
|
|
|
U1min |
|
|
|
||
|
03 |
|
|
|
|
|
|
f10 |
f1 |
|
|
|
|
|
|
|
|
|
|
|
|
f1min |
|
|
|
||
0 min |
|
3 |
|
|
2 |
|
М1 |
М 2 |
М max |
М |
б) |
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
М1 |
М |
|
М |
|
|
U pc |
|
|
|
|
|
|
|
2 |
max |
|
U pc max |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
М1 |
М 2 |
М max |
М |
в) |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.8. Механические характеристики (а), зависимости выходного на- |
|||||||||||||
пряжения и частоты ПЧ (б), напряжение регулятора скорости (в) от момента |
|||||||||||||
всистеме ПЧ-АД с обратной связью по скорости
Вслучае превышения допустимого тока статора АД (I1>I1max) и, соот-
ветственно M > Mmax выходное напряжение регулятора РС за счет ЗО ограничивается на уровне Uзс.мах (рис. 4.8 в). При этом вступает в работу отрицательная обратная связь по току статора с регулятора ограничения тока, обес-
40