

курсач ЭП
.pdfб) для червячно-реечной передачи:
|
V |
|
l |
|
t р |
ZЧ |
, |
|
|
|
|
||||
1 |
|
|
2 |
||||
|
|
|
|
|
где l, V – линейное перемещение, скорость;
, 1 – угловое перемещение, скорость; tш , t р – шаг винта, рейки;
ZЧ – число заходов червяка.
Расчетная схема механической части электропривода составляется пу-
тем приведения к одной расчетной скорости [5]. Формулы приведения угло-
вых (линейных) перемещений, скоростей, моментов (сил), жесткостей (по-
датливостей), моментов инерции (масс) и естественного механического демпфирования даны в табл. 2.1.
В табл. 2.1: ii 1 – передаточное число от двигателя к i-ому элементу
i
передачи, совершающему вращательное движение; j Vj – радиус приведе-
1
ния j-ого элемента, совершающего поступательное движение к скорости вращения вала.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Приводимый |
Приведение |
Приведение поступа- |
Приведение враща- |
|||||||||||||||||||||||||||
вращательных |
тельного движения к |
тельного движения к |
||||||||||||||||||||||||||||
параметр |
||||||||||||||||||||||||||||||
движений |
вращательному |
поступательному |
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||
Угол поворота |
прi |
i |
ii |
|
прj |
|
|
S j |
|
Sпрi |
i |
|
||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Угловая скорость |
прi |
i |
ii |
|
прj |
|
|
V j |
|
Vпрi |
i |
|
||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Кинематический зазор |
зпрi |
зi ii |
зпрj |
|
|
S j |
Sзрi |
зи |
||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Момент, усилие |
М прi |
|
|
M i |
|
М прj Fj |
Fпрi |
|
М i |
|
||||||||||||||||||||
|
|
ii |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Жесткость |
|
cпрi |
|
|
сi |
|
c |
|
|
c |
|
|
2 |
|
cпрi |
|
|
ci |
|
|||||||||||
|
|
i |
2 |
|
|
прj |
j |
|
|
|
2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Податливость |
e |
|
е i 2 |
|
e |
|
|
|
e j |
|
e |
|
e |
2 |
||||||||||||||||
прi |
|
прj |
|
прi |
||||||||||||||||||||||||||
|
|
|
|
i |
|
i |
|
|
|
|
2 |
|
|
i |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
11

Окончание табл. 2.1
Момент инерции, |
J прi |
|
J i |
|
|
J |
|
|
m |
|
|
2 |
mпрi |
|
J i |
|
||||
масса |
ii2 |
|
|
прj |
j |
|
2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Коэффициент есте- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
ственного механиче- |
|
|
|
i |
|
|
|
|
|
|
2 |
|
|
|
|
|||||
ского демпфирова- |
|
прi |
|
ii2 |
|
|
|
|
прj |
|
i |
|
|
|
прi |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ния |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При вычислении приведенного момента сопротивления, потери на тре-
ние в передачах механизма учитываются использованием коэффициента по-
лезного действия передачи (КПД).
В этом случае приведение внешних моментов и сил к валу двигателя,
производится по формулам:
– при направлении потока энергии от двигателя к рабочему органу
М |
|
|
М |
i |
; M |
|
|
Fj |
j |
; |
|
|
|
|
|
|
|
||||||
с |
|
|
|
c |
|
|
|||||
|
|
ii |
i |
|
j |
|
|||||
|
|
|
|
|
|
||||||
– при обратном направлении потока энергии (тормозной режим)
М с Мiii i ; M c Fj j j ,
где Mi, Fj – соответственно момент и сила, действующие на i, j элемент кине-
матической схемы или рабочий орган производственного механизма, Н м, Н;
i, j – КПД кинематической цепи между валом двигателя и i-м, j-м
элементом или рабочим органом;
MC – приведенное значение момента сопротивления механизма, Н м.
Если после приведения n упругих элементов с жесткостью с1 ,с2 ,...,сn
они окажутся соединенными последовательно, то эквивалентная жесткость cэкв этих элементов подсчитывается по формуле
сэкв |
|
|
|
|
|
|
1 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
1 |
... |
1 |
|
|||||
|
|
|
с |
|
|
|
|
||||
|
|
|
|
с |
2 |
|
с |
n |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
Для случая параллельного соединения m упругих элементов эквива-
лентная жесткость определяется по формуле
12
сэкв с1 с2 ... сm .
Для характеристики упругих свойств механических элементов исполь-
зуется понятие податливости, представляющую собой величину, обратную жесткости
е 1с .
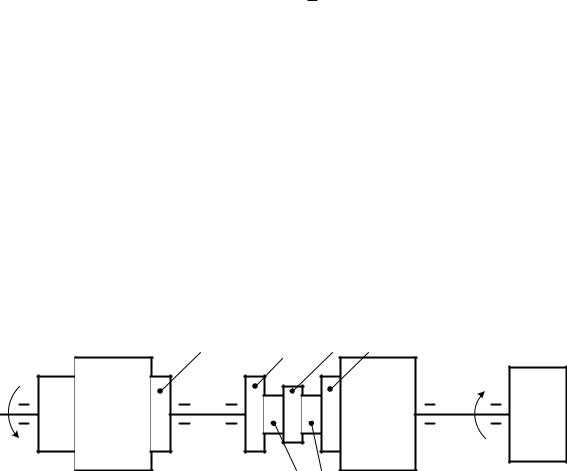
Последовательность составления расчетной схемы механической части электропривода и ее упрощения рассмотрим на примере механизма подъема
(Приложение 1).
В результате приведения к оси вала двигателя получим расчетную схе-
му (рис. 2.2), повторяющую реальную кинематическую схему, но элементы этой схемы имеют одну и ту же скорость и новые, приведенные значения моментов инерции, масс, жесткости и действующих на них моментов и сил.
Для дальнейших расчетов целесообразно графически изобразить эту схему в условном виде, как это показано на рис. 2.2:
J П 1 |
J2 ПР |
J4 ПР |
J П 1 |
M |
|
|
|
|
M с |
|
|
|
|
|
|
|
|
JТ |
J |
Д |
|
J |
J |
Г .ПР |
|
|
|
|
Б .ПР |
|
|
|
|
СМ |
|
|
СК .ПР |
|
|
|
|
|
|
|
|
|
|
J1 |
J |
3 ПР |
|
|
|
|
|
|
|
|
Рис. 2.2. Расчетная схема механической части электропривода механизма подъема
В расчетной схеме рис. 2.2 элементы со значительными моментами инерции J Д , Jб .пр. , J Г .пр изображаются прямоугольниками большей площади по сравнению с элементами с малыми моментами инерции JТ , J П1 , J П 2 , J1 ,
J 2 пр. , J3пр. , J4 пр. , которые изображаются прямоугольниками небольшой пло-
щади. Упругие механические связи большой жесткости (малой податливо-
сти) на рис. 2.2 изображаются короткими участками валов, а малой жестко-
сти (большой податливости) – длинными участками. Такое изображение по-
13
зволяет наглядно представить соотношение между этими параметрами эле-
ментов и обоснованно провести дальнейшее упрощение полученной расчет-
ной схемы.
На первом этапе этого упрощения следует объединить элементы, со-
единенные по условию задачи абсолютно жесткими механическими связями (элементы JТ , J Д , J П 1 и J П 2 , J1 , J 2пр. , J 3пр , J 4пр , J б.пр ). В результате для рас-
сматриваемого примера получается схема рис. 2.3, где три инерционных эле-
мента соединены двумя упругими связями. Такая расчетная схема называется трехмассовой механической системой.
|
|
|
, |
1 |
|
|
|
|
|
|
|
2 , 2 |
|
|
|
|
|
|
3 , 3 |
|
||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
С12 |
|
|
|
|
|
|
С23 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
J1 |
|
|
|
|
|
|
|
|
J |
2 |
|
|
|
|
|
|
|
|
|
J |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|||||
М |
|
|
|
|
M12 M 12 |
|
|
M |
23 |
M |
23 |
|
|
|
с |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Рис. 2.3. Схема трехмассовой механической системы
На рис. 2.3 также обозначены момент двигателя М, упругие моменты
М 12 , М 23 и момент сопротивления М С .
Другими характерными системами являются двухмассовая, показанная на рис. 2.4 а, и одномассовая (жесткое приведенное звено), рис. 2.4 б.
|
|
|
, |
1 |
|
|
|
|
|
|
|
|
2 , 2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
С12 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
J1 |
|
|
|
|
|
|
|
|
|
J2 |
|
|
|
|
|
|
|
|
|
|
|
M12 |
|
|
|
|
|
|
M с |
|||
|
|
|
|
|
|
|
M12 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
М |
|
|
|
|
|
|
|
|
|
а) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
,
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
с |
||
М |
|
|
|
|||||
|
|
|
|
|
б) |
|||
|
|
|
|
|
|
|
|
|
Рис. 2.4. Схема двухмассовой механической системы (а); одномассовой механической системы (б)
14

Двухмассовая механическая система, показанная на рис. 2.4 а, где J1 –
суммарный момент инерции первой массы; J2 – второй массы; C12 – жест-
кость механической связи между ними; M, M12, MC – моменты, действующие на элементы системы.
При выполнении курсового проекта в случае, если исходная система является трехмассовой, то рекомендуется перейти к двухмассовой системе.
Этот переход может быть осуществлен с помощью метода последовательно-
го упрощения [6], позволяющего динамическую систему с n дискретными массами привести к системе с m (m<n) дискретными массами, у которых соб-
ственные частоты и формы колебаний будут с достаточной точностью совпа-
дать с соответствующими характеристиками исходной системы. Расчетная схема разбивается на отдельные (парциальные) системы.
Собственная парциальная частота двухмассовой системы (рис. 2.4 а)
согласно [6], для вращательного движения |
|
Ωпа |
|
(J1 J2 ) C12 |
|
, а для од- |
||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J1J2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
номассовой (рис. 2.4 б) Ωпб |
|
Сэк |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Jпр |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
C12 |
|
|
|
|
|
|
|
|
|
|
CПР 1 |
|
|
|
CПР 2 |
|
||||||||
|
|
|
|
J1 |
|
|
|
|
J2 |
|
|
|
|
|
|
JПР |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
б) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
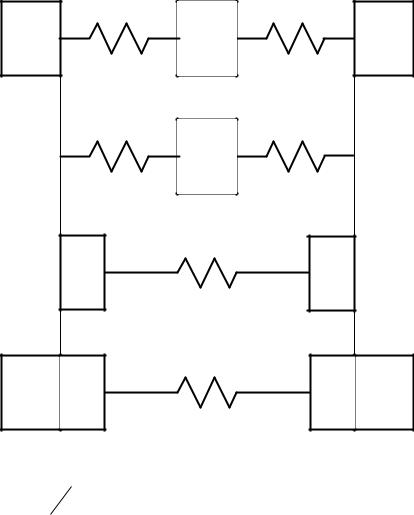
Рис. 2.5. Переход от двухмассовой системы к эквивалентной одномассовой
Тогда при переходе от двухмассовой парциальной системы (рис. 2.5 а)
к эквивалентной одномассовой (рис. 2.5 б) значения приведенных парамет-
ров рассчитываются по формулам:
J |
|
J |
|
J |
|
; C |
|
|
( J1 J 2 |
) C12 |
; C |
|
|
( J1 J 2 |
) C12 |
. |
пр |
1 |
2 |
пр.1 |
J 2 |
|
пр.2 |
J1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15

При обратном переходе от одномассовой системы (рис. 2.6 а) к эквива-
лентной двухмассовой (рис. 2.6 б) формулы для расчета приведенных пара-
метров имеют вид:
|
|
J |
|
|
|
J C1 |
; J |
|
|
|
J C2 |
; C |
|
|
|
|
|
С1 С2 |
. |
|
|
|
|
|
|||||||
|
|
|
П1 |
|
C1 C2 |
|
|
П 2 |
|
C1 C2 |
пр.12 |
|
С1 С2 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
C1 |
|
|
|
|
C2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CПР 12 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
JП1 |
|
|
|
|
|
|
|
JП2 |
|
|
|
||||||||
J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
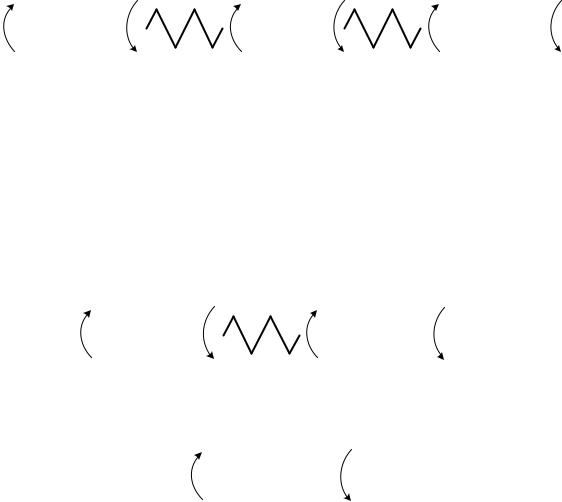
Рис. 2.6. Переход от одномассовой системы к эквивалентной двухмассовой Применительно к случаю сведения трехмассовой системы к двухмассо-
вой порядок действий следующий. В трехмассовой системе (рис. 2.7 а) выде-
ляется звено, включающее в себя элемент J2 и упругие связи C12 и C23
(рис. 2.7 б). Далее это звено заменяется звеном, состоящим из двух элементов J21, J23 и упругой связи C13 (рис. 2.7 в).
Значения J21, J23 и упругой связи C13 (рис. 2.7) рассчитываются по фор-
мулам:
J |
|
J |
|
|
|
C12 |
|
; |
J |
|
J |
|
|
|
C23 |
|
; C |
|
|
C12 C23 |
. |
|||||
|
21 |
|
2 |
|
C |
12 |
C |
23 |
|
|
23 |
|
2 |
|
C |
12 |
C |
23 |
|
13 |
|
C |
12 |
C |
23 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Затем элементы J21 и J23 |
присоединяются соответственно к элементам |
|||||||||||||||||||||||||
J1 и J3 в результате чего образуется двухмассовая система с жесткостью уп-
ругой связи C13 (рис. 2.7 г).
В курсовом проекте обычно рассматривается двухмассовая механиче-
ская система. Уравнения, записанные в соответствии с рис. 2.4 а для каждого
из элементов системы, имеют вид:
М М |
|
J |
|
|
d 1 |
|
; |
М |
|
М |
|
J |
|
|
d 2 |
; |
|||||
12 |
1 |
|
12 |
C |
2 |
|
|||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.1) |
||||||
|
|
|
|
|
|
; |
|
dM12 |
|
|
|
, |
|||||||||
М |
|
C |
|
|
C |
|
|||||||||||||||
12 |
|
|
|
|
|||||||||||||||||
|
|
12 |
1 |
|
2 |
|
|
|
dt |
|
12 |
1 |
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
16
где M, 1 , 1 , J1 – соответственно момент, скорость, угол поворота и момент инерции первой массы;
M 12 , C12 – упругий момент и жесткость механической связи;
2 , 2 , J 2 , M C – соответственно скорость, угол поворота, момент инерции и момент сопротивления второй массы.
C12
J1
C12
J21 |
J2 |
J2 |
C13
|
C13 |
J1 |
J21 |
C23
J3
а)
C23
б)
J23
в)
J23 |
J3 |
г) |
|
Рис. 2.7. Приведение трехмассовой системы к двухмассовой
При замене d dt на оператор p уравнения (2.1) в операторной форме записи, основанной на преобразованиях Карсона-Хевисайда примут вид:
M M12 J1 1 p; |
|
|
||||
|
|
M C J2 2 |
p; |
(2.2) |
||
M12 |
||||||
M |
12 |
p C |
|
. |
|
|
|
12 |
1 |
2 |
|
|
|
Тогда структурная схема двухмассовой системы примет вид (рис. 2.8):
17
|
|
|
|
|
M с |
|
M |
1 |
1 |
С12 |
M 12 |
1 |
2 |
|
J1 p |
|
p |
|
J 2 p |
|
|
M 12 |
|
2 |
|
|
|
Рис. 2.8. Структурная схема двухмассовой механической системы
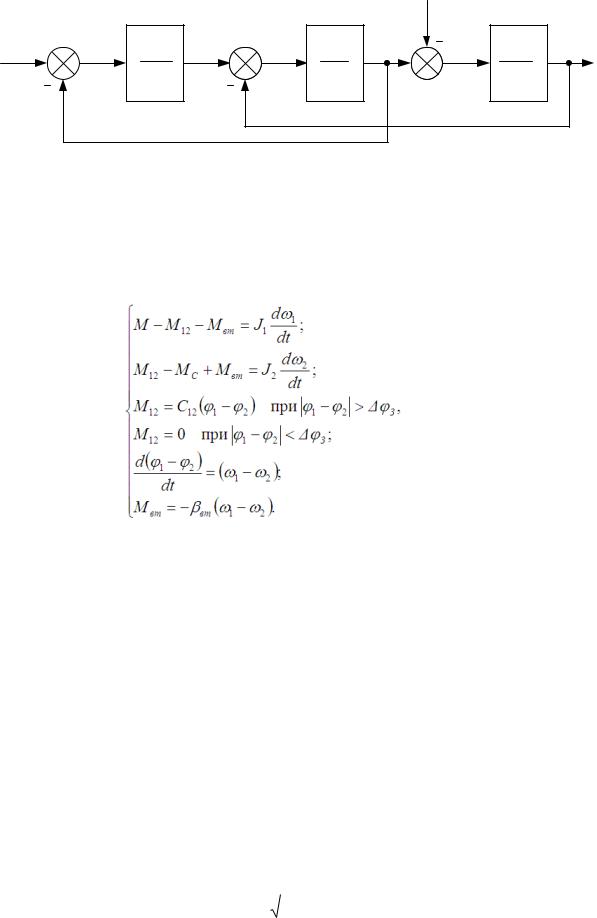
При учете кинематических зазоров в механическом оборудовании и есте-
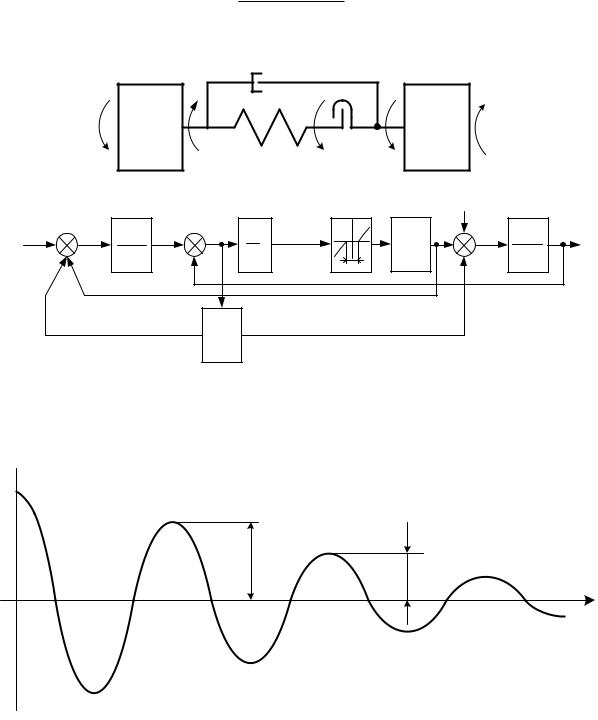
ственного механического демпфирования уравнения, описывающие движение двухмассовой расчетной механической системы (рис. 2.4 а) примут вид:
(2.3)
Естественное демпфирование в механических системах определяется рассеянием энергии при колебаниях, вызванное потерями, связанными с несовершенством упругого элемента и потерями в сочленениях (шпоночных и шлицевых соединениях, опорах валов и т. п.) [5].
Для характеристики рассеяния энергии в колебательных системах пользуются логарифмическим декрементом, представляющим собой лога-
|
A |
|
|
|
1 |
|
рис. 2.10. |
|
|||
рифм отношения двух последовательных колебаний ln |
A2 |
|
|
|
|
|
Логарифмический декремент может быть определен по известной величине действительной и мнимой части корней характеристического уравнения, так для двухмассовой системы
|
2 вт |
|
|
2 вт |
|
, |
(2.4) |
|
|
|
|
|
|||||
|
р |
122 |
вт2 |
|||||
|
|
|||||||
18
где |
вт |
вт ( J1 J 2 |
) |
; 2 |
C12 |
( J1 J2 ) . |
|
|
|
|
|
|
||
|
2J1 J 2 |
|
|
12 |
|
J1 J2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
, |
1 |
|
|
|
вт |
|
|
, |
2 |
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
С12 |
|
|
|
|
|
|
|
|
|
J1 |
|
|
|
|
|
З |
J2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
M 12 |
|
M 12 |
M 12 |
|
|
M с |
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
1 |
1 |
|
1 |
1 2 M12 |
M12 |
M с |
1 |
2 |
||||
M |
|
|
||||||||||||
|
|
J1 p |
|
|
2 |
p |
3 / 2 |
|
С12 |
|
|
|
J2 p |
|
|
|
|
|
1 2 |
|
|
+ |
|
|
|||||
|
|
M12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M вт |
|
|
вт |
|
|
M вт |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
б)
Рис. 2.9. Расчетная схема двухмассовой механической системы (а) и структурная схема (б)
 M 12
M 12
A1 |
А2 |
t |
|
Рис. 2.10. Колебательный процесс при наличии демпфирования
По данным [3] естественное механическое демпфирование обеспечива-
ет значение 0,1...0,3 .
При представлении демпфирования эквивалентным вязким трением
[3,5] выражение для момента демпфирования
M вт вт ( 1 2 ) ,
19

где вт – эквивалентный коэффициент вязкого трения.
Для двухмассовой расчетной схемы [5] аналитическое выражение, свя-
зывающее вт |
с параметром механической части и |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вт |
2 |
|
|
J |
1 J |
2 C12 |
|
. |
(2.5) |
|||||
|
|
|
J |
|
) |
(7,45 2 |
|
||||||||
|
|
|
( J |
1 |
2 |
) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для одномассовой расчетной схемы (рис. 2.4 б) уравнение движения |
|||||||||||||||
имеет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M M C J |
|
d |
|
|
|
(2.6) |
|||||||
|
|
|
|
, |
|
|
|
||||||||
|
|
|
dt |
|
|
|
|||||||||
где J – суммарный момент инерции привода.
|
n |
Ji |
m |
|
|
J J Д |
|
mj p2j , |
(2.7) |
||
2 |
|||||
|
i 1 |
i |
j 1 |
|
|
|
i |
|
где JД – момент инерции двигателя;
Ji , m j – моменты инерции, массы элементов механической части при-
вода, совершающие вращательное и возвратно-поступательное движение;
ii , p j – передаточное число от i-го и радиус приведения от j-го элемен-
тов к валу двигателя.
Структурная схема одномассовой системы приведена на рис. 2.11.
M |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
MC |
|
J Σ p |
|
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
|
|
, |
|
||||||
|
|
|
|
|
|
|
|
||
Рис. 2.11. Структурная схема одномассовой системы механической части электропривода
20