

курсач ЭП
.pdfU |
|
R i |
|
d 1 |
; |
|
||||||
1 |
|
|
|
|
||||||||
|
1 |
1 |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 1 |
|
|
|
|
|
|||
|
|
R1 i1 |
|
|
|
|
|
|||||
U1 |
|
|
|
|
; |
|
||||||
|
|
dt |
|
(4.35) |
||||||||
|
|
|
|
|
|
|
d 2d |
|
||||
U |
|
R' |
i |
|
|
; |
||||||
|
|
|
||||||||||
|
2d |
2 |
2d |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
d 2q |
|
|
|
|||
U |
|
R' |
i |
|
, |
|||||||
2q |
|
|||||||||||
|
2 |
2q |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
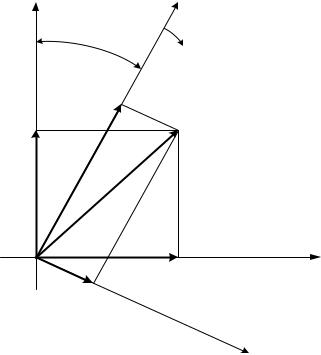
где R1 и R2 – активные сопротивления фазы статора и фазы ротора.
1 |
|
|
|
|
|
|
|
ось |
|
i1 |
|
|
|
|
|
|
|
|
|
U 1
эл
|
d |
сь |
2 |
|
эл
q
d
d
 ось 1
ось 1
 U1
U1 
 i1
i1
сь 2
Рис. 4.15. Модель ОЭМ в осях 1 – 1 , 2d – 2q
51
Потокосцепления обмоток определяются результирующим действием токов всех обмоток ОЭМ:
|
1 |
L1 ,1 i1 L1 ,1 i1 L1 ,2d i2d L1 ,2q i2q ; |
|||
|
1 |
L1 ,1 i1 |
L1 ,1 i1 L1 ,2d i2d L1 ,2q i2q ; |
||
|
|
|
|
|
(4.36) |
|
2d L2d ,1 i1 |
L2d ,1 i1 L2d ,2d i2d L2d ,2q i2q ; |
|||
|
2q L2q ,1 i1 |
L2q ,1 i1 L2q ,2d i2d L2q ,2q i2q , |
|||
где L1 ,1 L1 ,1 L1 – собственные индуктивности обмоток статора. |
|||||
L2d ,2d |
L2q ,2q |
L2 |
– собственные индуктивности обмоток ротора. |
||
L1 ,1 |
L1 ,1 |
0 ; |
L2d ,2q L2q ,2d 0 – взаимоиндуктивности обмоток |
||
статора и ротора, сдвинутых в пространстве на угол 90 электрических градусов.
Взаимные индуктивности обмоток статора и ротора:
L1 ,2d L2d ,1 L12 сos эл ;
L1 ,2q L2q,1 L12 сos( эл 90 ) L12 sin эл ;
L1 ,2q L2q,1 L12 сos эл ;
L1 ,2d L2d ,1 L12 сos( эл 90 ) L12 sin эл ,
где L12 – наибольшее значение взаимной индуктивности, которое имеет место при совмещении осей обмоток.
Электромагнитный момент ОЭМ определяется как частная производ-
ная от запаса электромагнитной энергии машины по углу поворота между осями статора и ротора.
|
|
|
М |
Wэм |
, |
(4.37) |
|
|
|
|
|||
|
|
|
|
|
|
|
2q |
ЭЛ – механический угол поворота ротора. |
|
||||
где WЭМ |
1 |
ii i ; |
|
|||
|
|
|||||
i 1 2 |
pП |
|
|
|
||
Тогда электромагнитный момент ОЭМ, выраженный через токи обмоток:
52
|
|
2q |
2q |
|
||
М |
1 |
ii |
Li , j |
ij . |
(4.38) |
|
|
|
|||||
|
2 i 1 |
j 1 |
|
|||
После подстановки выражений для собственных и взаимных индуктив-
ностей обмоток уравнение электромагнитного момента ОЭМ примет вид
М рП L12 (i1 i2d i1 i2q ) сos эл (i1 i2q i1 i2d ) sin эл , (4.39)
4.3.2. Координатные преобразования уравнений обобщенной элек-
трической машины
Система уравнений, описывающих процессы преобразования энергии ОЭМ, включающая в себя уравнения электрического равновесия (4.35) и
электромагнитного момента (4.39) в осях α-β, d-q, представляет собой систе-
му нелинейных дифференциальных уравнений с периодическими коэффици-
ентами, что представляет большие трудности для ее решения.
Для упрощения математического описания, которое заключается в за-
мене периодических коэффициентов на постоянные, то есть устранения зави-
симости взаимоиндуктивностей обмоток ОЭМ от угла поворота ротора, осу-
ществляется переходом от действительных переменных в осях α,β и d,q, свя-
занных со статором и ротором, к новым переменным в системе координат
U,V, вращающихся в пространстве со скоростью ωк (координатные преобра-
зования). При координатных преобразованиях должно соблюдаться условие постоянства (инвариантности) мощности в исходной и преобразованной системах.
Представим каждую обмоточную переменную – напряжение, ток, по-
токосцепление в виде вектора, направление которого связано с соответст-
вующей данной обмотке осью координат, а модуль изменяется во времени в соответствии с изменениями изображаемой переменной.
На рис. 4.16 показаны обмоточные переменные статорных цепей ОЭМ,
связанные с осями α,β, в общем виде обозначены буквой x1 и оси U,V, повер-
нутые относительно статора на угол к к t .
53
|
U |
|
k |
||
k |
||
X1U |
|
|
X 1 |
|
|
X 1 |
|
|
X 1 |
|
|
X1V |
|
V
Рис. 4.16. Переменные статорной цепи ОЭМ в системах координат α, β и U, V
Аналогично для роторных цепей в осях d,q , но в функции угла к эл .
Для перехода от осей α,β и d,q к осям U,V воспользуемся формулами преобразования декартовых координат при повороте осей [3].
Формулы прямого преобразования при переходе от осей α,β и d,q к
осям U,V
х1U x1 сos кt x1 sin кt |
|
|
|
|
|
||||||||
х1V |
x1 sin кt x1 сos кt |
|
|
|
|
||||||||
|
|
|
(4.40) |
||||||||||
х2U |
x2d сos( кt эл ) x2q sin( кt эл ) |
. |
|||||||||||
|
|
||||||||||||
х |
2V |
x |
2d |
sin( |
t |
эл |
) x |
2q |
сos( |
t |
эл |
) |
|
|
|
к |
|
|
к |
|
|
|
|||||
Формулы обратного преобразования при переходе от осей U,V к осям
α,β и d,q
х1 х1 х2d х2q
x1U
x1U
x2U
x2U
cos кt x1V sin кt |
|
|
|
|
|||||
sin кt x1V cos кt |
|
|
|
|
|||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
. |
(4.41) |
cos( кt эл ) x2V sin( кt эл ) |
|
||||||||
sin( |
t |
эл |
) x |
2V |
cos( |
t |
эл |
) |
|
к |
|
|
к |
|
|
|
|||
54
Формулы прямого и обратного преобразований (4.40, 4.41) координат ОЭМ используются при построении управляющих вычислительных уст-
ройств для регулируемых электроприводов переменного тока.
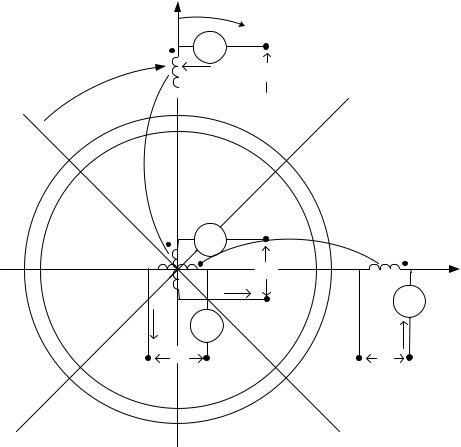
В результате координатных преобразований приходим к модели ОЭМ в осях U,V на рис. 4.17.
U |
e1U |
к |
|
|
|
|
|
~ |
к |
i |
U1U |
|
1U |
|





e2U
|
~ |
|
V |
|
|
|
|
|
|
U2U |
|
|
|
i2U |
|
|
|
|
~ e1V |
i2V |
~ |
|
i1V |
|
e2V |
||
|
|
||
|
|
|
|
U2V |
|
U |
1V |
|
|
|
Рис. 4.17. Модель ОЭМ в осях U,V
Как видно из рис. 4.17 переход к осям U,V соответствует переходу к взаимонеподвижным обмоткам, вращающимся со скоростью K. Поэтому в осях U,V потокосцепление каждой обмотки определяется собственной индук-
тивностью L1 или L2 и взаимной индуктивностью L12 c другой обмоткой, рас-
положенной на той же оси. Взаимодействие с токами других обмоток отсут-
ствует, так как их оси сдвинуты на 90 электрических градусов.
Выражение для потокосцеплений в осях U,V примут вид
55
1U
1V
2U
2V
L |
i |
L |
i |
|
|
1 |
1U |
12 |
2U |
|
|
L1 i1V L12 i2V |
|
(4.42) |
|||
|
|
|
|
. |
|
L2 i2U L12 i1U |
|
||||
L2 i2V L12 i1V
При подстановке в уравнения электрического равновесия (4.35) и элек-
тромагнитного момента (4.39) обмоточных переменных ОЭМ U, I и ψ, выра-
женных с помощью формул прямого преобразования (4.40), получим уравне-
ния электрического равновесия и электромагнитного момента в осях U,V [3].
U |
|
i |
R |
d 1U |
|
|
|
|
|
|
|
||||||||||||
1U |
|
|
к |
1V |
|
|
|||||||||||||||||
|
1U |
1 |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
d 1V |
|
|
|
|
|
|
|
|
|
|
|||||||
U |
|
i |
R |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
1V |
2V |
1 |
|
|
|
|
dt |
|
|
|
|
|
|
к |
|
|
1U |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
d 2U |
|
|
|
|
|
|
|
|
|||||||
U2U i2U R2 |
|
( к эл ) |
|
|
|||||||||||||||||||
|
|
dt |
|
|
2V |
|
|||||||||||||||||
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U2V |
i2V |
R2 |
|
|
2V |
|
|
|
( к эл ) |
|
(4.43) |
||||||||||||
|
|
|
dt |
|
|
2U |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M pП L12 (i1V i2U i1U i2V ) |
. |
||||||||||||||||||||||
|
|||||||||||||||||||||||
|
|||||||||||||||||||||||
M pП ( 1U i1V 1V |
i1U ) |
|
|
|
|||||||||||||||||||
|
|
|
|
L12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M p |
|
( |
|
i |
|
|
|
|
|
|
i ) |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
П |
|
L2 |
|
|
|
|
1V |
|
2U |
|
|
|
1U |
|
2V |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M p |
|
L12 |
( |
|
i |
|
|
|
|
i ) |
|
|
|||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
П |
|
L2 |
|
|
|
|
2U |
|
|
1V |
|
|
|
2V 1U |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В уравнениях электрического равновесия (4.43) первый член в правой части является падением напряжения на активных сопротивлениях, второй член обусловлен изменением тока в обмотках и называется трансформатор-
ной ЭДС, включающей в себя ЭДС само- и взаимоиндукции. Третья состав-
ляющая ЭДС вращения, связана с вращением системы координат U,V отно-
сительно исходных систем координат α,β и d,q.
Условие инвариантности мощности при координатных преобразовани-
ях выполняется [3].
Координатные преобразования упрощают математическое описание процессов электромеханического преобразования энергии в ОЭМ за счет
56
устранения зависимости взаимоиндуктивностей и электромагнитного момен-
та от механической координаты угла поворота ротора относительно статора φ.
4.3.3. Варианты выбора скорости вращения координатных осей U,V
На практике широко используются следующие варианты выбора скорости K.
Выбор K = 0 обеспечивает преобразование реальных переменных ро-
тора в осях d,q к неподвижным осям α,β, связанным со статором машины.
При этом напряжения и токи обмоток ОЭМ остаются переменными, но име-
ют одинаковую частоту, равную частоте тока статора.
Выбор K = ЭЛ соответствует преобразованию реальных переменных ОЭМ к осям d,q связанными с ротором машины. Напряжения и токи здесь также переменные, но имеют как в роторной, так и статорной цепях частоту тока ротора.
Выбор K = 0ЭЛ обеспечивает преобразование в осях x,y. Пусть к ре-
альным обмоткам статора ОЭМ приложена симметричная двухфазная систе-
ма напряжений:
U1 U1max сos оэлt ; U1 U1max sin оэлt ,
где U1max – амплитудное значение напряжения.
С помощью формул прямого преобразования (4.40), положив K = 0ЭЛ
преобразует напряжения U1 ,U1 в напряжения U1x ;U1y :
U1x U1max сos2 оэлt U1max sin2 оэлt U1max
U1y U1max сos оэлt sin оэлt U1max sin оэлt cos оэлt 0 .
Таким образом, в осях x,y реальные переменные напряжения преобра-
зуются в постоянное напряжение U1max , приложенное к обмотке по оси х. Во многих случаях, при исследовании динамики и построения систем управле-
ния, возможность замены синусоидальных переменных постоянными дости-
гается преобразованием к осям x,y.
57

Уравнения электромеханического преобразования энергии для корот-
козамкнутого АД примут вид
U |
|
i |
|
R |
d 1x |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
1x |
|
|
|
|
оэл |
1у |
|
|
|
|
||||||||||||||||||||||
|
|
1x |
1 |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
U |
|
i |
|
R |
d 1у |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1у |
2 у |
|
|
|
оэл |
1х |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 i |
/ |
R / |
|
|
|
d 2 х |
|
( |
|
|
|
|
|
|
|
) |
||||||||||||||||
2 х |
|
|
|
оэл |
эл |
|
||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0 i |
/ |
R / |
|
|
d 2 у |
( |
|
|
|
|
|
) |
||||||||||||||||||||
2 у |
|
|
оэл |
эл |
||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M pП ( 1х i1у 1у i1х ) |
|
|
|
|
|
|
||||||||||||||||||||||||||
M pП ( i1у i1х ) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
M p |
|
|
L12 |
( |
|
i |
|
|
|
i |
|
|
) |
|||||||||||||||||||
П |
|
2 х |
2 у |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
L2 |
|
|
|
|
|
|
1у |
|
|
|
|
|
|
1х |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2 у
2 х
. (4.44)
4.3.4. Фазные преобразования переменных
Реальные двигатели переменного тока чаще всего имеют трехфазную обмотку статора, поэтому возникает необходимость преобразования пере-
менных трехфазной машины к переменным двухфазной модели и наоборот.
Также как и при координатных преобразованиях должны выполняться усло-
вия инвариантности мощности.
Согласно [3] при переходе от параметров трехфазной к параметрам двухфазной машины
X |
|
|
|
3 |
|
|
X |
|
|
|
|
|
|
|
1 |
2 |
1a |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
, |
(4.45) |
|||
|
|
|
1 |
|
|
|
|
|
|
|||||
X |
|
|
|
( X |
|
X |
|
) |
|
|||||
1 |
|
|
|
|
|
1b |
1c |
|
||||||
|
|
|||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
где Х1а , Х1b , Х1с – реальные переменные статора трехфазной машины;
Х1α , Х1β – реальные переменные статора двухфазной машины.
При переходе от параметров двухфазной машины к трехфазной
58
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Х1а |
|
2 |
|
X1 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
3 |
|
|
|
|
|
|
X1b |
|
|
|
|
( |
|
X1 |
|
|
|
X1 ) |
(4.46) |
|||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
3 |
|
|
|
2 |
|
|
|
|
2 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
( |
|
1 |
X |
|
|
|
3 |
|
X |
|
|
|||
X |
|
|
|
|
|
|
|
|
) |
|
|||||||||||
1c |
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|||||||||
|
|
|
|
|
3 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Количественные соотношения между амплитудами переменных двух-
фазной и трехфазной машин:
X |
|
(2ф) |
3 |
|
X |
|
(3ф) |
|
|||
1max |
2 |
1max |
|
||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
. |
(4.47) |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
(3ф) |
|
2 |
|
|
X |
|
|||
X |
|
|
|
|
(2ф) |
|
|||||
1max |
|
3 |
1max |
|
|||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
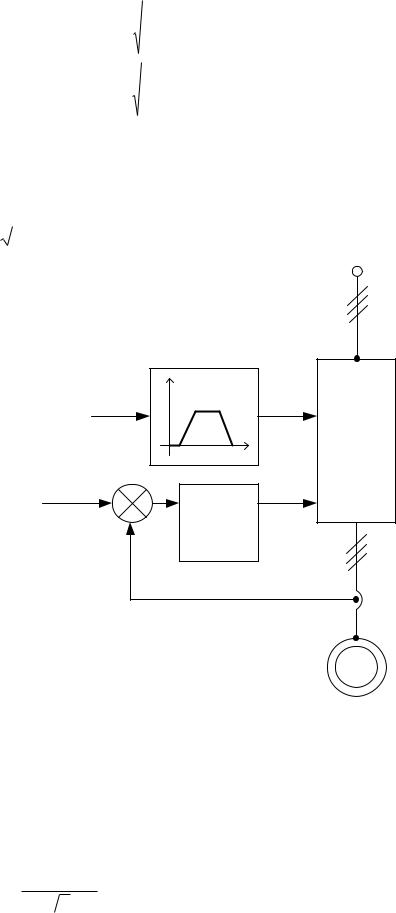
4.3.5. Разомкнутые системы скалярного частотно-токового управления
В разомкнутых системах частотно-токового уравнения (ЧТУ) АД управляющими величинами (рис. 4.18) являются частота f1 и величина тока I1
статора.
Согласно [3] выражения для расчета статической механической харак-
теристики M=f(S) токов I2/ и Iμ и жесткости механической характеристики на линейном участке (S<Sк) для двухфазной модели АД имеют вид
|
M |
|
|
|
|
2 M к1 |
|
|
|
; |
|
|
|
|
||||||
|
|
|
S |
|
|
S |
|
|
|
|
|
(4.48) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
к1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
S |
|
|
Sк1 |
|
|
|
|
|
|||||
|
|
|
|
I |
2 |
|
|
X |
2 |
н |
|
|
|
|
||||||
M к1 |
|
|
|
|
1max |
|
|
|
|
, |
(4.49) |
|||||||||
|
|
|
|
|
|
( Х |
|
|
|
|
Х |
/ |
|
|||||||
|
2 |
он |
н |
|
2н ) |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где Sк1 |
|
|
R/ 2 |
|
. |
X |
н |
Х / |
2н |
||
|
|
|
|
|
59
|
|
|
|
|
|
|
I / |
I |
|
|
|
|
|
|
|
|
|
X н |
|
|
|
|
|
; |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
2 |
|
|
|
|
|
/ |
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
X н Х / |
2н |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
(4.50) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
I I1 |
|
|
R / 2 |
/ S |
a |
2 X / |
2н 2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||||
|
|
|
|
|
|
|
R / 2 |
/ S |
a |
2 |
X |
н |
Х / 2н 2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Sa |
о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
– абсолютное скольжение; |
|
|
|
|
|
|||||||||||||||||
|
|
|
он |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
I |
|
|
I1 |
max |
|
– действующее значение тока статора. |
|||||||||||||||||||||
1 |
|
|
|
||||||||||||||||||||||||
|
|||||||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
U З f1
U ЗТ I1
~
ЗИ |
|
|
|
U |
U yf |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
ПЧ |
t |
|
|
(ИН) |
|
U yI |
1 |
|
|
|
|
|
РТ |
|
|
|
I1
АД M
Рис. 4.18. Функциональная схема разомкнутой системы ЧТУ При рассмотрении трехфазной машины
|
|
3 |
|
|
|
|
I 2 |
X 2 н |
|
|
|
|
||
М к 1 |
|
|
|
|
1 |
|
|
|
|
|
, |
(4.51) |
||
2 |
|
|
|
( Х |
|
|
Х / |
|
||||||
|
|
2 |
он |
н |
2 н ) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где I1 ( 3ф ) I1 max ( 2ф ) .  3
3
60