

курсач ЭП
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Факультет автоматики и вычислительной техники
Кафедра электропривода и автоматизации промышленных установок
Н. И. ПРИСМОТРОВ
С. И. ОХАПКИН
Д. В. ИШУТИНОВ
ЭЛЕКТРИЧЕСКИЙ ПРИВОД.
КУРСОВОЕ ПРОЕКТИРОВАНИЕ
Учебное пособие
Киров
2013
1
УДК 62-83(07) П771
Рекомендовано к изданию методическим советом факультета автоматики и вычислительной техники ФГБОУ ВПО «ВятГУ»
Допущено редакционно-издательской комиссией методического совета ФГБОУ ВПО «ВятГУ» в качестве учебного пособия для студентов cпециальности 140604.65 «Электропривод и автоматика промышленных установок и технологических комплексов», направления 221000.62 «Мехатроника и робототехника», 140400.62 «Электроэнергетика и электротехника», профиля подготовки «Электропривод и автоматика»
Подготовлено на кафедре «Электропривод и автоматизация промышленных установок»
Рецензенты:
руководитель тематического направления ОАО «Электропривод», кандидат технических наук,
заслуженный конструктор Российской Федерации В. Ф. Шалагинов;
доцент кафедры «Автоматика и телемеханика» ФГБОУ ВПО «ВятГУ», кандидат технических наук В. И. Семеновых
Присмотров, Н. И. |
|
П771 Электрический привод. Курсовое проектирование. |
Учебное пособие / |
Н. И. Присмотров, С. И. Охапкин, Д. В. Ишутинов. – |
Киров: ФГБОУ ВПО |
«ВятГУ», 2013. – 169 с.: ил. |
|
|
УДК 62-83(07) |
В учебном пособии рассматриваются теоретические основы современного частотного электропривода. Приведена классификация и основы расчета типовых механизмов. Достаточно подробно рассмотрены системы асинхронного электропривода со скалярным, полярным и векторным управлением, а также системы с прямым управлением моментом (DTC). Методическая база пособия позволяет решать проектные задачи, связанные с созданием современного электропривода. Учебное пособие предназначено для студентов специальности 140604.65 «Электропривод и автоматика промышленных установок и технологических комплексов», изучающих дисциплины: «Теория электропривода», «Электрический привод», «Системы управления электроприводами (СУЭП)», «Автоматизированный электропривод типовых производственных механизмов и технологических комплексов (АЭПТПМ и ТК)», «Электропривод типовых механизмов (ЭПТМ)», «Приводы и элементы систем управления роботами и манипуляторами», «Специальные приводы». А также для студентов направления 221000.62 «Мехатроника и робототехника», изучающих дисциплины: «Электрические и гидравлические приводы мехатронных и робототехнических систем», «Системы управления приводами», «Проектирование электротехнических устройств», «Приводы в современных технологиях», «Моделирование мехатронных систем», «Основы мехатроники и робототехники», «Цифровой и частотный привод», «Общепромышленные приводы» и направления 140400.62 «Электроэнергетика и электротехника», профиля подготовки «Электропривод и автоматика», изучающих дисциплины: «Электропривод», «Цифровое и частотное управление», «Моделирование в технике», «Спецприводы», «Системы управления электроприводами», «Проектирование электротехнических устройств», «Электроприводы в современных технологиях», «Общепромышленный электропривод».
Тех. редактор А. В. Куликова
© ФГБОУ ВПО «ВятГУ», 2013
2
Содержание
Введение………………………………………………………………………. 5
1.Задание на курсовое проектирование……………………………......... 6
2.Составление расчетных схем механической части электропривода и их упрощение……………………………………………….………… 8
2.1. Передаточные механизмы……………………………………….. 9
3.Расчет нагрузочной диаграммы электропривода, требуемого мо-
мента, скорости и мощности приводного двигателя………………… |
21 |
|
3.1. |
Расчет нагрузочной диаграммы механизма…………………….. |
21 |
3.2. |
Расчет момента, выбор скорости и мощности двигателя……… |
23 |
4. Системы асинхронного частотно-регулируемого электропривода… |
25 |
|
4.1.Показатели качества регулирование координат
электропривода……………………………………………………………. 25
4.1.1.Точность и диапазон регулирования скорости……………...... 25
4.1.2.Динамические показатели качества регулирования…………. 28
4.2.Системы скалярного управления…………………………………… 29
4.2.1.Разомкнутые системы скалярного управления в частотно-
регулируемом асинхронном электроприводе…………… |
35 |
4.2.2. Замкнутые системы скалярного управления…….……… |
37 |
4.2.3.Структурные схемы систем ПЧ-АД при скалярном управлении………………………………………………... 41
4.2.4.Выбор вида и расчет параметров регуляторов. Последовательная коррекция контуров
регулирования……………………………………………………. 42
4.2.5.Выбор вида и расчет параметров регулятора
скорости…...……………………………………………………….. 47
4.3.Системы асинхронного электропривода с частотно-токовым управлением………………………………………………………. 50
4.3.1.Обобщенная электрическая машина.………..………….. 50
4.3.2.Координатные преобразования уравнений обобщенной электрической машины…………………………………... 53
3
4.3.3.Варианты выбора скорости вращения координатных
осей U,V……………………………………………………………. 57
4.3.4.Фазные преобразования переменных…………………… 58
4.3.5.Разомкнутые системы скалярного частотно-токового управления………………………………………………... 59
4.3.6.Замкнутые системы ЧТУ при скалярном
управлении……………………………………………………….. 62
5.Системы полярного и векторного управления асинхронными двигателями……………………………………………………………... 70
5.1.Система полярного частотно-токового управления при поддержании потокосцепления ротора…………………………. 76
5.2.Регулирование момента в системах частотного и частотнотокового управления асинхронного электропривода………….. 82
5.3.Тормозные режимы частотно-управляемых электроприводов.. 86
5.4.Оптимизация контуров регулирования системы полярного частотно-токового управления……………………….…....……. 91
5.5.Системы векторного управления в частотно-регулируемом электроприводе при поддержании постоянства потокосцепления ротора……………………………………………………….………. 98
5.5.1.Преобразование переменных величин из одной системы координат в другую в системах векторного
управления……………………………………………………… 100
5.5.2.Система регулирования скорости и момента электропривода с векторным управлением
асинхронного двигателя при определении потокосцепления ротора по модели потока…………….. 103
6. Прямое управление моментом асинхронного двигателя….….……… 119
Приложения……………………………………………………………..…. 133
Библиографический список………………………………………………….. 169
4
Введение
Курс электрического привода включает в себя комплекс общих вопро-
сов, относящихся к силовой части электропривода и систем управления,
обеспечивающих электромеханическое преобразование энергии. Правильный выбор системы электропривода с соответствующей силовой частью и систе-
мой управления позволяет получить необходимые эксплуатационные харак-
теристики, отвечающие требованиям технологической установки приводи-
мой в движение.
Задания на курсовое проектирование посвящены вопросам составления расчетных схем электропривода и их упрощения, расчета мощностей при-
водных двигателей на основании данных о технических параметрах, требуе-
мых значений моментов, скоростей и ускорений технологической установки и выбора комплектного электропривода с учетом требуемого диапазона и точности регулирования координат, расчета регулировочных характеристик в установившихся и переходных режимах, проверки выбранного двигателя по теплу, перегрузочной способности и условиям пуска, определение расхода электроэнергии за цикл работы, среднециклового КПД и коэффициента мощности.
В работе приводятся методические указания по всему комплексу вы-
полняемых в проекте расчетных задач.
5
1. Задание на курсовое проектирование
1.1. Исходные данные для проектирования электроприводов механиз-
мов технологических установок приведены в Приложении 1.
1.2. Содержание работы
1.2.1. Расчетная часть. При курсовом проектировании расчетную часть
рекомендуется выполнять в следующем порядке:
1) Составить исходную расчетную схему механической части, выпол-
нив приведение параметров элементов и моментов нагрузки к валу двигателя.
Провести ее упрощение путем перехода к двухмассовой и одномассовой (же-
сткое приведенное звено) расчетным схемам (раздел 2).
2) |
На основании технических данных (Приложение 1) рассчитать на- |
грузочную диаграмму механизма (раздел 3.1). |
|
3) |
По заданной тахограмме и нагрузочной диаграмме рассчитать тре- |
буемый |
момент, скорость и мощность двигателя (раздел 3.2). |
4) |
Выбрать по каталогу комплектный электропривод, включающий |
двигатель (Приложение 2) и преобразователь частоты (Приложение 3), раз-
работать принципиальную схему электропривода.
5) Составить структурную схему электропривода (по заданию прапода-
вателя, разделы 4, 5).
6) Построить механические характеристики соответствующие макси-
мальной и минимальной скоростям механизма (по заданию праподавателя,
разделы 4, 5).
7) Рассчитать динамические характеристики привода M f ( t )и
f ( t ) при пуске и торможении:
а) с учетом результирующей податливости и зазора в двухмассовой ме-
ханической системе;
б) без учета зазора;
в) для жесткого приведенного звена (вариант расчета задается препода-
вателем).
6
8) Проверить предварительно выбранный двигатель по нагреву, пере-
грузочной способности и условиям пуска.
9) Определить расход электроэнергии за цикл работы, среднецикловые значения КПД и коэффициента мощности.
1.2.2. Графическая часть должна содержать:
1)Кинематическую схему электропривода.
2)Исходную и упрощенную расчетные схемы механической части.
3)Электрическую принципиальную схему электропривода.
4)Тахограмму и нагрузочные диаграммы механизма и электропривода.
5)Механические характеристики электропривода.
6)Структурную схему электропривода.
7) Графики переходных процессов (M = f(t), = (t)) пуска
и торможения.
7
2. Составление расчетных схем механической части электроприво-
да и их упрощение
Кинематические схемы электропривода (ЭП) представляют собой абст-
рактное изображение механической части ЭП, отражающее передачу элек-
тромагнитной мощности от двигателя к рабочему органу и кинематическую связь в механизме. Здесь пренебрегают упругостью элементов и зазорами в передачах. Данные упрощения при расчетах дают представление лишь о средних значениях скоростей, ускорений, сил и моментов, действующих в движущихся звеньях механизма.
Истинные значения величин скоростей, ускорений, сил и моментов да-
ют динамические расчеты, учитывающие упругость механических связей и зазоров. В связи со сложностью динамических расчетов, обусловленной от-
сутствием точных количественных характеристик, связей и наличием второ-
степенных факторов, мало влияющих на динамику, прибегают к упрощению расчетных схем. Это позволяет составить достаточно простую расчетную схему, удовлетворительно отражающую динамические свойства ЭП.
Упрощение расчетов достигается за счет введения следующих допущений:
1)Представления всех распределенных параметров сосредото-
ченными.
2)Приведения моментов и сил, моментов инерции и движущихся масс, упругих связей и зазоров к одной скорости (чаще всего к скорости вала двигателя).
3)Пренебрежения рядом второстепенных факторов, например,
упругостью отдельных элементов, трением в кинематических цепях и т. д.,
помня при этом, что основные закономерности движения многомассовых систем определяются наибольшими массами (моментами инерции) и наи-
меньшими жесткостями (наибольшими податливостями) упругих механиче-
ских связей. Выделение в расчетных схемах основных масс и упругих связей обычно не вызывает затруднений. Если выделение основных масс и упругих
8

связей затруднено, можно воспользоваться методом обоснованного последо-
вательного упрощения расчетных схем [6].
2.1. Передаточные механизмы
По конструктивному исполнению различают следующие виды переда-
точных механизмов:
Редукторы (рис. 2.1 а) по числу зубчатых пар разделяются на одно-,
двух-, трех-, n-ступенчатые. По виду зубьев: на прямоугольные, косозубые,
червячные. По исполнению: на цилиндрические и конические. По принципу действия: обычные, планетарные, волновые.
Редуктор характеризуется передаточным числом
i 1 z2 ,
2 z1
где 1 , 2 – входная, выходная скорости вращения редуктора; z1 , z2 – количество зубьев шестерен зубчатой пары.
Передаточное число n – ступенчатого редуктора i i1 i2 ... in ,
где i1 ,i2 ,...,in – передаточные числа отдельных ступеней.
Ременные (цепные) передачи (рис. 2.1 б) характеризуются передаточ-
ным числом
i |
1 |
|
D2 |
|
z2 |
, |
||
|
2 |
D |
z |
|||||
|
|
|
|
|||||
|
|
|
1 |
1 |
|
|||
где D1 , z1 – диаметр (число зубьев) входного шкива (звездочки);
D2 , z2 – диаметр (число зубьев) выходного шкива (звездочки).
Передачи зубчатое колесо-рейка, барабан – трос (рис. 2.1 в, 2.1 г) пре-
образуют вращательное движение в поступательное и характеризуются ра-
диусом приведения
V D , м / рад .1 2
9
Z 1
Вход
Вход |
|
|
|
|
|
|
|
D1 (Z1 ) |
|
|
|
|
|
||||
|
|
|
|
|
|
|



 1
1 

 1
1
2 |
|
|
|
|
Выход |
Выход |
D2 |
(Z2 ) |
|
|
2 |
Z 2 |
|
а) |
б) |
D |
D |
1 |
1 |
|
|
|
V |
m |
V |
|
в) |
г) |
V |
V |
1 |
|
1
д) |
ж) |
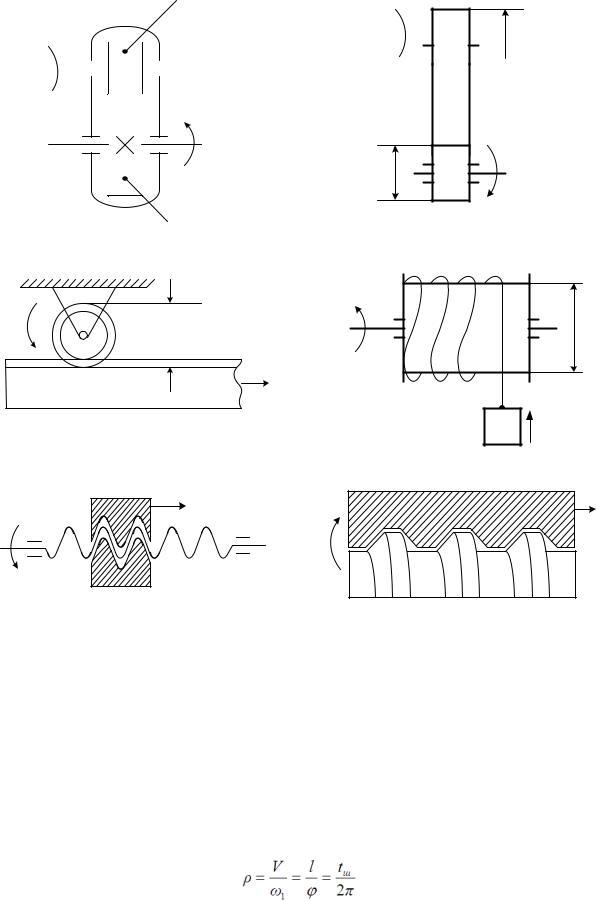
Рис. 2.1. Кинематические звенья: редуктор (а); ременная (цепная передача) (б); передача «зубчатое колесо-рейка» (в); передача «канат (трос) – барабан (шкив)» (г); передача «винт-гайка» (д); «червячно-реечная» передача (ж)
Винтовая и червячно-реечная передачи (рис. 2.1 д, 2.1 ж) преобразуют
вращательное движение винта (червяка) в поступательное перемещение гай-
ки (рейки). Радиус приведения поступательного движения к вращательному:
а) для винтовой передачи:
;
10