

Измененные с троки матрицы жесткости при наложении граничных условий
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|






Не указанные элементы не изменяются.
Вектор-столбец нагрузки получит нулевые значения на закрепленных направлениях:
 ;
;
Если перемещения в закрепленных узлах не равны нулю, то их действительные значения, умноженные на диагональный элемент матрицы жесткости, помещают в соответствующую строку вектора нагрузки.
Решение системы уравнений и анализ результатов расчета
Таким образом, уравнения равновесия для фермы примут вид
 . (2.8)
. (2.8)
Решение системы
уравнений (2.8) сводится к вычислению
вектора-столбца неизвестных перемещений

 . (2.9)
. (2.9)
Существуют стандартные программы решения системы линейных алгебраических уравнений методом Гаусса без нахождения обратной матрицы к матрице жесткости (SIMQ“Fortrun”).
После решения уравнений (2.8) и нахождения узловых обобщенных перемещений по выражению (2.9) определяются узловые продольные перемещения в локальной системе координат для каждого элемента по формуле (2.1):

По продольным
перемещениям в локальной системе
координат можно найти величину
относительной деформации
 :
:
 (2.10)
(2.10)
И величину внутренних нормальных напряжений в каждом элементе
 (2.11)
(2.11)
А также продольное внутреннее усилие
 (2.12)
(2.12)
Для решения динамической задачи формируется система уравнений вида:
 , (2.13)
, (2.13)
в которой
глобальная матрица масс
 формируется аналогично матрице жесткости
путем сложения матриц масс элементов.
формируется аналогично матрице жесткости
путем сложения матриц масс элементов.
Поиск частного
решения уравнения (2.13), при гармоническом
внешнем воздействии
 ,
сводится к заданию выражения для
обобщенных перемещений
,
сводится к заданию выражения для
обобщенных перемещений в виде функций, подобных правой части
уравнения.
в виде функций, подобных правой части
уравнения.
Пусть внешние силы изменяются по закону:
 =
= . (2.14)
. (2.14)
Если ни одна
из собственных частот колебаний не
совпадает с частотой
 ,
то возможно найти амплитуды вынужденных
установившихся колебаний.
,
то возможно найти амплитуды вынужденных
установившихся колебаний.
Произвольное частное решение уравнения (2.13), соответствующее установившемуся режиму, представим в виде
 (2.15)
(2.15)
Вторая производная от выражения (2.15) равна

Подставляя выражение (2.15) в уравнение (2.13), получим

Приравнивая
коэффициенты в левой и правой части при
 ,
приходим к линейной системе алгебраических
уравнений:
,
приходим к линейной системе алгебраических
уравнений:
 ,
,
вынесем за скобки неизвестные амплитудные значения
 (2.16)
(2.16)
Обозначим
 ,
,
тогда уравнение (2.16) становится аналогичным (2.8)
 (2.17)
(2.17)
В матрице
 и столбце
и столбце необходимо преобразовать строки,
соответствующие перемещениям, на которые
наложены ограничения (необходимо учесть
главные граничные условия), также как
это производилось для матрицы [K]
при статических расчетах. После система
уравнений (2.17) решается с помощью
программы, реализующей метод Гаусса и
находятся амплитуды вынужденных
колебаний
необходимо преобразовать строки,
соответствующие перемещениям, на которые
наложены ограничения (необходимо учесть
главные граничные условия), также как
это производилось для матрицы [K]
при статических расчетах. После система
уравнений (2.17) решается с помощью
программы, реализующей метод Гаусса и
находятся амплитуды вынужденных
колебаний в решении (2.15) для установившегося
режима.
в решении (2.15) для установившегося
режима.
Разработка интерфейса пользователя
Исходные данные (Рис. 2.4) формируются в таблицах (элемент управления dataGridView) размещенных на вкладках (tabPage).

Рис. 2.4 Координатная матрица узлов конструкции.
С целью контроля корректности ввода данных, считываемые координаты узлов масштабируются и выводятся на форму в элементе PictureBoxи соединяются элементами в соответствии с топологической матрицей (Рис. 2.5). Здесь же отражаются условия закрепления конструкции и внешние узловые силы. После вычисления статических перемещений узлов или амплитудных значений обобщенных координат при решении динамической задачи, результаты в увеличенном масштабе наносятся на графическое представление фермы при нажатии кнопки «Построение».
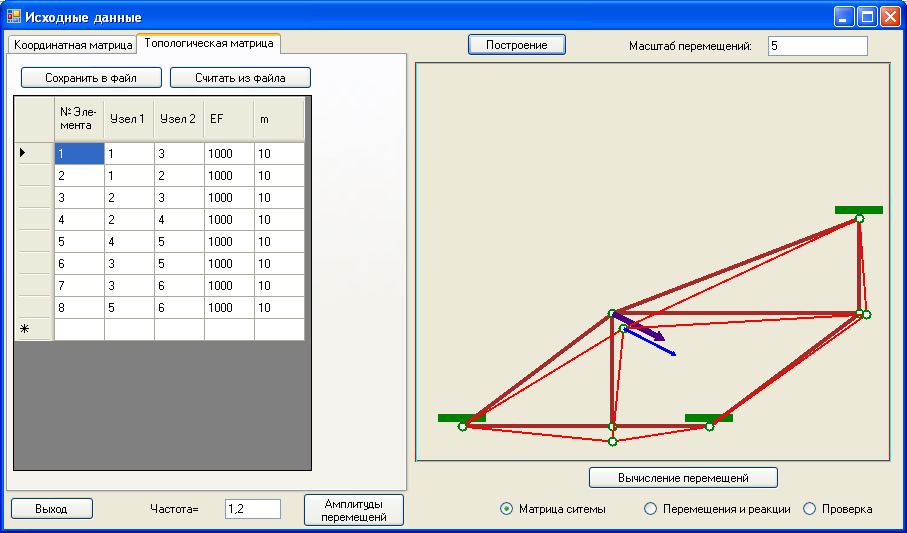
Рис. 2.5. Топологическая матрица элементов и изображение амплитуд перемещений в пятикратном увеличении.
Информация о числовых значениях всех матриц расчетных уравнений, которые формируются и преобразуются при проведении вычислений выводятся в таблице (dataGridView) на второй форме (Рис. 2.6), причем результат вывода зависит от радио-кнопок на основной форме. В зависимости от радио-кнопок и вида расчетов (статика, динамика) на второй форме в первой таблице отражаются: матрица жесткости системы, матрица системы уравнений для определения амплитуд установившихся колебаний при заданной частоте внешних сил, перемещения и реакции связей и статическая проверка решения.

Рис. 2.6. Результаты расчетов матриц системы и усилий в стержнях фермы.
Во второй таблице на форме 2 приводятся величины относительных деформаций и продольные усилия в стержнях конструкции. Текст клиентского кода программы приведен в ПРИЛОЖЕНИИ 1.
Формирование матриц жесткости и масс конечного элемента при исследовании деформации изгиба
Метод конечных элементов предусматривает задание форм перемещений не по всей длине стержня, а лишь на отдельных участках длины h(Рис. 3.1), на которые разбивается стержневая система:

Рис. 3.1. Выделение элемента длины h.
В пределах каждого участка для случая для случая изгиба стержня формы перемещений задаются кубическим полиномом:
 (3.1)
(3.1)

Рис. 3.2. Нумерация перемещений в пределах элемента
Учитывая, что:




Если выразить
 через прогибы и углы поворота на краях
рассматриваемого элемента, то получим:
через прогибы и углы поворота на краях
рассматриваемого элемента, то получим:




Подставляя
 в выражение (3.1) имеем
в выражение (3.1) имеем

Вынесем обобщенные координаты за скобки как общие множители и сформируем произведение матриц
 ,
(3.2)
,
(3.2)
В компактной форме

где q – вектор-столбец обобщенных перемещений, которыми являются перемещения узловых точек на границе элементов по ортогональным направлениям


- одномерные функции Эрмита:

Функции Эрмита удовлетворяют следующим условиям:

 ;
; ;
; ;
;

 ;
; ;
; ;
;

 ;
; ;
; ;
;

 ;
; ;
; ;
;
Каждая из функций Эрмита определяет изгиб жестко заделанной балки, которая получила единичное смещение по соответствующему направлению. Эти единичные смещения показаны на рисунке 3.3.
Выражения (3.2) можно представить в виде
 ;
;
Обозначим

Тогда
 (3.3)
(3.3)

Рис. 3.3. Единичные смещения по обобщенным перемещениям
Равновесие элемента в обобщенных координатах имеет вид

где
 - обобщенные силы от внутренних сил
упругости элемента,
- обобщенные силы от внутренних сил
упругости элемента,
 - обобщенные силы от внешних активных
сил.
- обобщенные силы от внешних активных
сил.
Чтобы получить обобщенные силы от внутренних сил упругости и матрицу жесткости для балочного элемента, запишем выражение потенциальной энергии внутренних сил элемента:
 ;
(3.4)
;
(3.4)
где
 (3.5)
(3.5)
E- модуль упругости материала балки,I- момент инерции сечения элемента.

Обобщенные силы от внутренних сил упругости выражаются через потенциальную энергию

Обозначим как матрицу жесткости элемента

После вычисления
интеграла и подстановки матрицы
 получим
получим

После перемножения матриц имеем:
 (3.6)
(3.6)
Обобщенные силы от внутренних сил упругости примут вид
 (3.7)
(3.7)
где
 – вектор-столбец обобщенных перемещений.
– вектор-столбец обобщенных перемещений.
Обобщенные силы от внешних активных воздействий на элемент определим через возможную работу на обобщенных перемещениях
 (3.8)
(3.8)
где в соответствии с (3.3) вариация поперечного перемещения
 ,
,
а проекция
распределенной нагрузки на поперечное
направление к оси элемента при линейном
законе распределения выражается через
ее узловые значения
 :
:
 , (3.9)
, (3.9)
при
 ,
,
 .
.
 (3.10)
(3.10)
где
 ,
,

Рис. 3.4. Интенсивность воздействия распределенных сил на рамный (балочный) конечный элемент
Тогда
 .
(3.11)
.
(3.11)
Коэффициенты
в выражении возможной работы при
соответствующих вариациях обобщенных
координат
 называются
обобщенными силами, то есть
называются
обобщенными силами, то есть
 (3.12)
(3.12)
где
 -
значения распределенной нагрузки в
узловых точках.
-
значения распределенной нагрузки в
узловых точках.
В выражение (3.12) необходимо добавить сосредоточенные узловые активные силы, в проекции на направление обобщенных перемещений.
Вернемся к условию равновесия в обобщенных координатах, представив его в виде
 ,
,
Тогда для конечного элемента оно выглядит так:
 (3.13)
(3.13)
При решении динамической задачи уравнения составляем на основе уравнений Лагранжа второго рода:
 (3.14)
(3.14)
где T – кинетическая энергия механической системы, которую необходимо выразить через обобщенные координаты:
 ,
,
где m –масса единицы длины стержневого элемента.
Выразим скорости точек элемента через обобщенные координаты и функции Эрмита, получим:
 (3.15)
(3.15)
Под интегралом в выражении (3.15) стоит квадратная матрица:

После вычисления
интеграла получаем выражение кинетической
энергии через произведение обобщенных
скоростей и матрицы масс [M]
размером 4 4.
4.
 , (3.16)
, (3.16)
где


Вычисляя производные в левой части уравнений Лагранжа второго рода (3.14), получим:

и с учетом соотношения (3.7) запишем
 (3.17)
(3.17)
Уравнение (3.17) определяет модель движения упругой динамической системы под действием внешних переменных сил.
Формирование матриц жесткости и масс рамного конечного элемента
Рамный конечный
элемент плоской конструкции кроме
деформаций изгиба испытывает деформации
растяжения-сжатия и отличается от
элемента балки, тем что к четырем
обобщенным перемещениям
 добавляются два, аналогичные обобщенным
перемещениям элемента фермы
добавляются два, аналогичные обобщенным
перемещениям элемента фермы (Рис. 1.2). Перенумеруем обобщенные
перемещения элемента в порядке следования
узлов (рис. 3.5).
(Рис. 1.2). Перенумеруем обобщенные
перемещения элемента в порядке следования
узлов (рис. 3.5).

Рис. 3.5. Нумерация перемещений в пределах элемента
Что будет соответствовать вектор-столбцу перемещений узлов элемента
 .
.
Тогда к внутренним силам добавится продольная сила и ее учет в матрице жесткости приведет к ячейкам, аналогичным ячейкам матрицы ферменного элемента
 (3.18)
(3.18)
Подобным образом расширяется матрица масс в уравнении (3.17):
 ; (19)
; (19)
И вектор-столбец
внешних узловых сил
 :
:
 (3.20)
(3.20)
После формирования всех матриц для исследования динамического равновесия каждого элемента можно записать уравнения вида (3.17), если в правую часть добавить сосредоточенные внешние силы, приложенные в узлах элемента
 (3.21)
(3.21)
в которых размерность системы равна шести. Это уравнение составлено в локальной системе координат (рис. 3.5).