Изобразить внешний вид регулировочных характеристик трёхфазного управляемого мостового выпрямителя для случая, когда. Привести математические выражения, описывающие эти выражения.
3-х фазный выпрямитель
служит для регулирования среднего
значения Ud
на нагрузке, за счёт задержки момента
отпирания очередных тиристоров
относительно точек естественного
отпирания. В случае достаточно большой
индуктивности![]() ,
задержка момента отпирания создаёт
аналогичную по величине задержку
запирания вентилей.
,
задержка момента отпирания создаёт
аналогичную по величине задержку
запирания вентилей.
При этом регулировочные
характеристики![]() имеют
особый характер.
имеют
особый характер.
Задание соответствующего угла задержки отпирания α определяет величину вырезки в кривой фазного напряжения, задание Ud.
Чем больше α, тем меньше Ud.
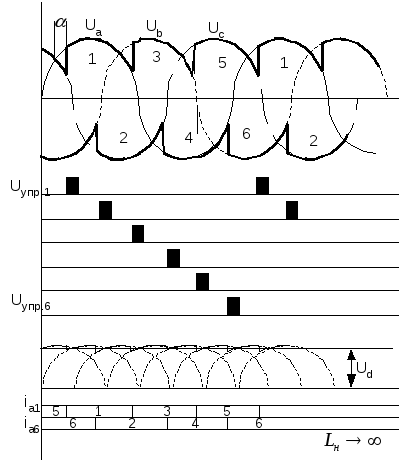
К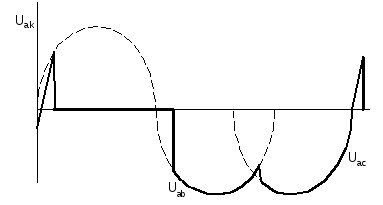 ороткие
импульсыUупр.
, подаваемые на управляющие электроды
VS
с определённой задержкой α
задаются в соответствии с алгоритмом
3-х фазной мостовой схемы СИФУ. На нагрузке
формируется линейное напряжение,
значение которого определяется α.
При
ороткие
импульсыUупр.
, подаваемые на управляющие электроды
VS
с определённой задержкой α
задаются в соответствии с алгоритмом
3-х фазной мостовой схемы СИФУ. На нагрузке
формируется линейное напряжение,
значение которого определяется α.
При
![]() форма анодных токов тиристоров
представляет прямоугольники и длительность
протекания тока определяется углом
проводимости вентиля. В кривойUак
появляется импульс положительной
полярности Uупр
в моменты, когда
α≠0
и тиристоры находятся в непроводящем
состоянии.
форма анодных токов тиристоров
представляет прямоугольники и длительность
протекания тока определяется углом
проводимости вентиля. В кривойUак
появляется импульс положительной
полярности Uупр
в моменты, когда
α≠0
и тиристоры находятся в непроводящем
состоянии.
Кривая Uак
при обратном
напряжении имеет вырезки, но тиристоры
выбраны на максимальное напряжение:
![]()
П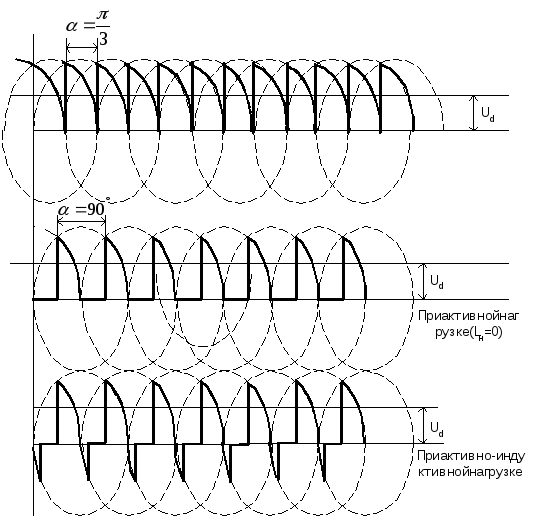 ри
изменении
ри
изменении![]() вне зависимости от характера нагрузки
кривая напряженияUd
располагается в положительной
полуплоскости. Ток имеет непрерывный
характер, исключая только, когда α=60°,
при этом
вне зависимости от характера нагрузки
кривая напряженияUd
располагается в положительной
полуплоскости. Ток имеет непрерывный
характер, исключая только, когда α=60°,
при этом
![]() .
.
При активной нагрузке
(![]() )
угол изменяется
)
угол изменяется![]() криваяUd
имеет паузы, где Ud=0
и Id=0.
криваяUd
имеет паузы, где Ud=0
и Id=0.
![]()
При активно-индуктивной нагрузке ток цепи нагрузки задаётся относительно напряжения задержки запирания тиристоров (тиристор закрывается, когда анодный ток равен нулю), а следовательно, в нагрузке появляется напряжение имеющее отрицательное значение, Ud относительно активной нагрузки, это приводит к уменьшению диапазона изменения α.

Постоянные и переменные потери в электродвигателях. Пути снижения потерь энергии в переходных режимах.
Математическое описание реальных звеньев 1-го порядка.
Постоянные и переменные потери в электродвигателях. Пути их снижения потерь энергии в переходных режимах.
Полные потери можно разделить на постоянные и переменные.
К постоянным относятся такие потери, которые от величины нагрузки не зависят (механические потери, потери в стали и на возбуждение):
![]()
![]() ,
если регулирование по цепи возбуждения
не ведётся.
,
если регулирование по цепи возбуждения
не ведётся.
Переменные потери – изменяются с изменением нагрузки на валу двигателя. Имеют место на активных сопротивлениях обмоток машин.
ДПТ НВ:
![]()
ДПТ ПВ:
![]()
АД:
![]() ;
;![]()
![]()
Если
![]() ,
то потери на активных сопротивлениях
статора от
,
то потери на активных сопротивлениях
статора от![]() (тока намагничивания) можно отнести к
постоянным.
(тока намагничивания) можно отнести к
постоянным.
СД:
![]()
![]() –полные номинальные
потери.
–полные номинальные
потери.
Тогда для ДПТ НВ:
![]()
ДПТ ПВ:
![]()
АД:
![]()
СД:
![]()
Потери можно выразить и через скольжение:
![]()
Потери энергии в переходных режимах:
![]()

![]()
Пуск ЭП в холостую:
 ,
потери энергии равны запасу кинетической
энергии, которую приобретают маховые
массы ЭП к концу разгона.
,
потери энергии равны запасу кинетической
энергии, которую приобретают маховые
массы ЭП к концу разгона.Реверс:
 , потери энергии: 3 запаса кинетической
энергии выделяется при торможении отω0
до 0; и 1 запас при разгоне в противоположном
направлении.
, потери энергии: 3 запаса кинетической
энергии выделяется при торможении отω0
до 0; и 1 запас при разгоне в противоположном
направлении.Потери при торможении противовключением:
 ,
в этом случае в потери идёт запас
кинетической энергии и 2 запаса
потребляются из сети.
,
в этом случае в потери идёт запас
кинетической энергии и 2 запаса
потребляются из сети.
Динамическое торможение:
![]()
![]() ,
в тепловом отношении динамическое
торможение предпочтительнее в сравнении
с режимом противовключения, т.к. потери
в три раза меньше.
,
в тепловом отношении динамическое
торможение предпочтительнее в сравнении
с режимом противовключения, т.к. потери
в три раза меньше.
В данном случае рассматривались потери в роторной цепи, но есть ещё потери в статорной цепи на их активном сопротивлении:

Влияние нагрузки на величину потерь: при пуске привода нагрузка увеличивает время переходного процесса, тем самым увеличивая потери; при торможении, наоборот, время переходного процесса уменьшается, уменьшаются и потери.
Влияние сопротивления роторной цепи( R1): при значениях Sк=0,41 мы имеем минимальное время пуска. При этом сокращается ток, потребляемый АД, что ведёт к уменьшению потерь в статоре, которые пропорциональны I2. При дальнейшем увеличении сопротивления ротора время пуска будет расти, но потери общие будут уменьшаться, т.к. Iпуск уменьшится.
Пути снижения потерь энергии в переходных режимах:
Снижение за счёт уменьшения запаса кинетической энергии, т.е. уменьшать суммарный момент инерции, за счёт использования двигателей краново-металлургических серий, за счёт конструкций с удлиненным ротором.
Использование вместо однодвигательного привода многодвигательного.
С
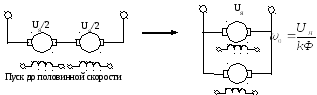 тупенчатое
изменение скорости идеального холостого
хода при пуске и торможении, более
эффективно в многоскоростных АД.
тупенчатое
изменение скорости идеального холостого
хода при пуске и торможении, более
эффективно в многоскоростных АД.
Пуск в две ступени:
1)
![]() 2)
2)![]()
Торможение:
1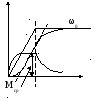 )
)![]()
![]()
2)
![]() ,
т.е в 3 раза меньше.
,
т.е в 3 раза меньше.
Логическим продолжением ступенчатого пуска является плавное изменение ω0 в системе преобразователь – двигатель.
![]()
![]()
![]()
![]()
![]()
![]()