

Типовые желаемые лачх
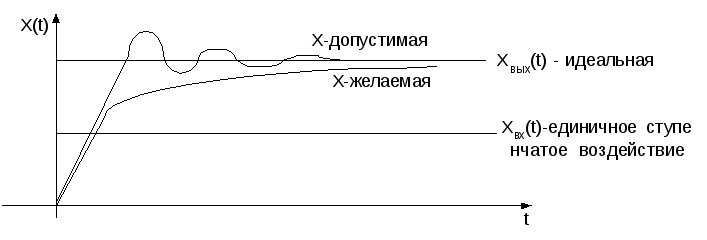
Желаемые ЛАЧХ системы по задающему воздействию:

![]()


Желаемые ЛАЧХ системы по задающему воздействию:

Статические САУ:

Астатические САУ:



Система полярного управления АД. Достоинства и недостатки.
Привести диаграмму управления тиристором Uy=f(Iy). Пояснить принцип её построения и выбора рабочей точки на нагрузочной прямой для обеспечения надёжного отпирания тиристорного ключа.
Система полярного управления ад.
В системах полярного управления регулируется, как амплитуда, так и фаза тока.
Привести диаграмму управления тиристором . Пояснить принцип её построения и выбора рабочей точки на нагрузочной прямой для обеспечения надёжного отпирания тиристорного ключа.
Выходной каскад блока усиления и формирования (БУФ) должен обеспечить необходимую мощность управляющего сигнала, чтобы обеспечить надёжное отпирание тиристора.
Для это на этапе
проектирования системы управления
строят диаграмму управления тиристором
![]() :
:

Строят две кривые гарантированного отпирания тиристоров:
при максимальном сопротивлении;
при минимальном.
Потом строят допустимую
по режиму нагреву кривую мощности
прибора;
![]() – справочные данные. Не заштрихованная
область – область гарантированного
отпирания тиристоров. В схеме БУФ в цепь
управления включается резисторRи
для ограничения максимального тока,
вместе rдиф.
прибора (по цепи управления) – это
нагрузка для БУФ, поэтому проектируя
БУФ строят нагрузочную прямую MN:
– справочные данные. Не заштрихованная
область – область гарантированного
отпирания тиристоров. В схеме БУФ в цепь
управления включается резисторRи
для ограничения максимального тока,
вместе rдиф.
прибора (по цепи управления) – это
нагрузка для БУФ, поэтому проектируя
БУФ строят нагрузочную прямую MN:
т. М – режим холостого хода БУФ;
т. N
– режим короткого замыкания
![]()
т. Р – рабочая точка, берётся вблизи кривой 2 на пересечении с MN (берётся по возможности максимальный Iупр).
Логарифмический критерий устойчивости Найквиста


Система устойчивая, если
![]()
![]()
m≠0

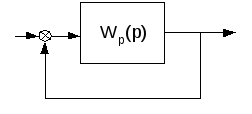

![]() –в общем виде.
–в общем виде.
![]() –в логарифмическом
масштабе.
–в логарифмическом
масштабе.
![]() –является точка, в
которой ЛАЧХ пересекает ось абцисс.
–является точка, в
которой ЛАЧХ пересекает ось абцисс.

Если между ЛАЧХ и ЛФЧХ существует однозначная зависимость, то такие системы называются минимальнофазовыми.
![]() ,
где
,
где
![]()

Система векторного управления АД. Достоинства и недостатки.
Последовательная коррекция.
Система векторного управления ад. Достоинства и недостатки.
Осуществляет раздельное регулирование каждой из проекций статорного тока: I1X и I1Y.

Система регулирования состоит из основных узлов:
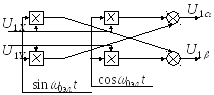
Блок фазных преобразований (БФП). В нём осуществляется переход от параметров 3-х фазной машины к параметрам 2-х фазной в блоке П3/2 по формулам:
![]() ;
;
![]()
![]() ;
;
![]() ;
;![]()
В блоках координатных преобразований (БКП) осуществляется переход от осей
 ,
к осямX,Y(в
блоке КП1) по формулам прямого
преобразования:
,
к осямX,Y(в
блоке КП1) по формулам прямого
преобразования:
![]()
Блок КП1:

КП2: переход от осей
X,Y
к осям
![]() :
:
![]()
В данной системе для
регулирования момента осуществляется
регулирование составляющей тока:
![]() ,
который будет пропорционален эл.\маг.
моменту МАД,
при поддержании потока постоянным
Ф=const
будет пропорционален I1X.
,
который будет пропорционален эл.\маг.
моменту МАД,
при поддержании потока постоянным
Ф=const
будет пропорционален I1X.