

Электромеханические свойства ад.
Целесообразно представить в системе X,Y:
выбирается
![]() – поля статора.
– поля статора.
![]()
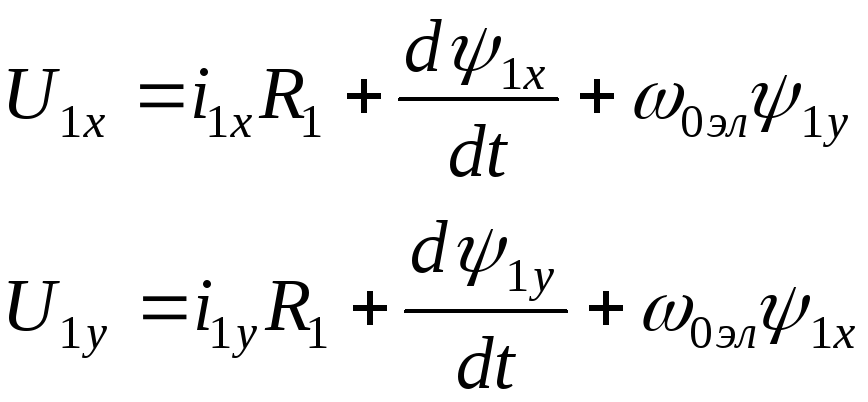
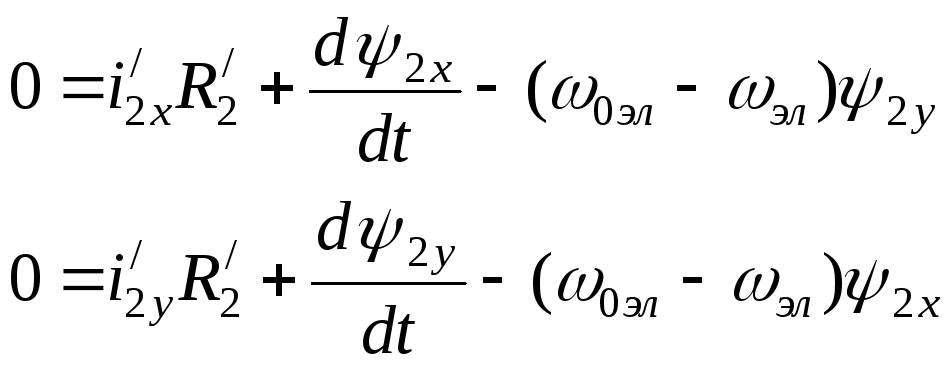
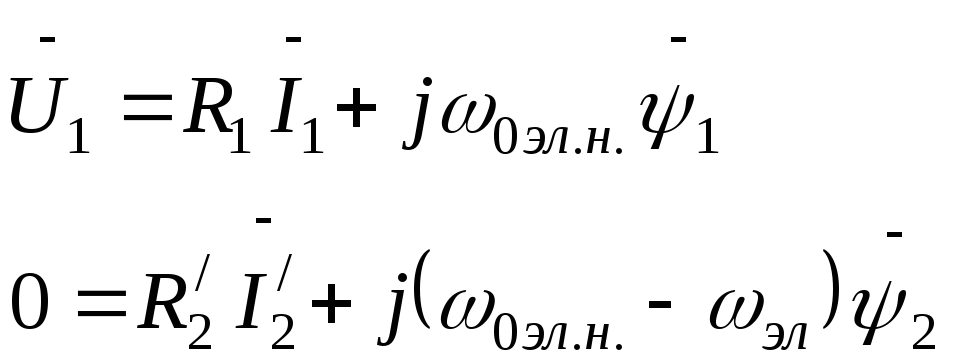
Уравнение электрического равновесия можно записать в комплексной форме, приняв Х за действительную, а Y– за мнимую часть.
![]()
![]()

![]()
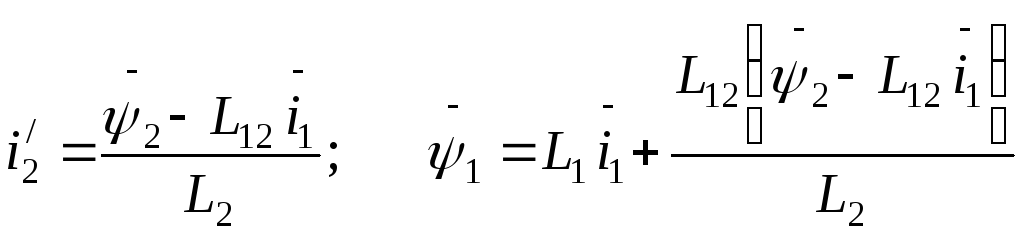
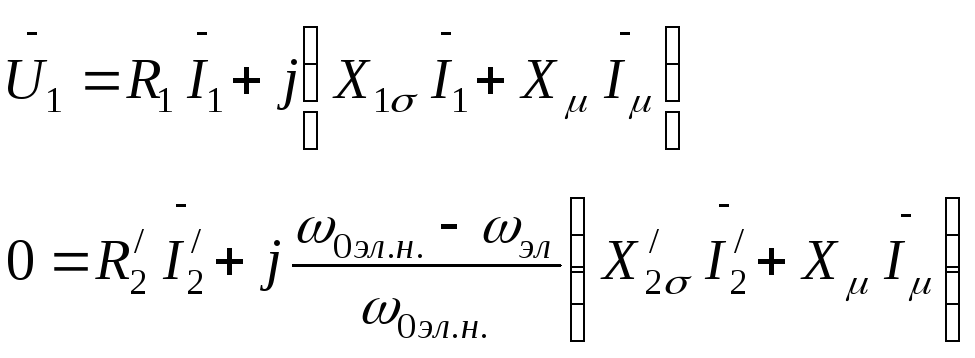
![]() наиболее удобной
записью уравнения является их запись
через потокосцепление.
наиболее удобной
записью уравнения является их запись
через потокосцепление.
![]()


![]() ,
где
,
где
![]() –
мнимая часть.
–
мнимая часть.
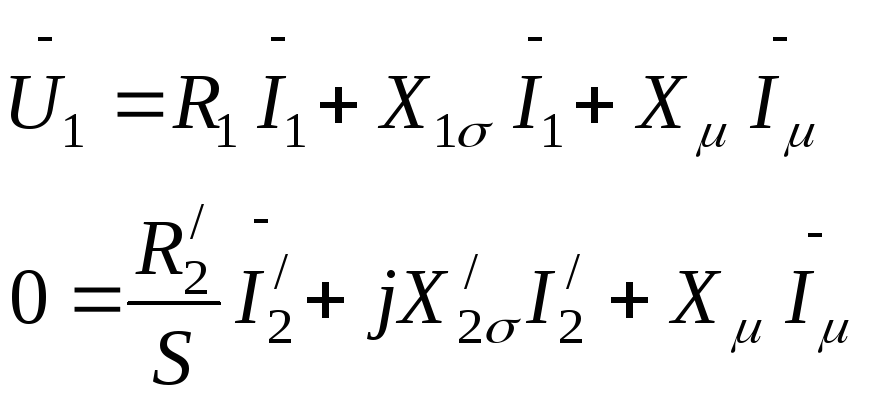
В установившемся
режиме:
![]()
Уравнение равновесия:
![]()
![]() ,
пусть
,
пусть
![]() –
ток намагничивания.
–
ток намагничивания.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() –скольжение.
–скольжение.
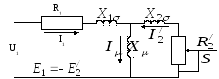
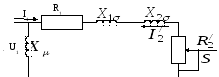
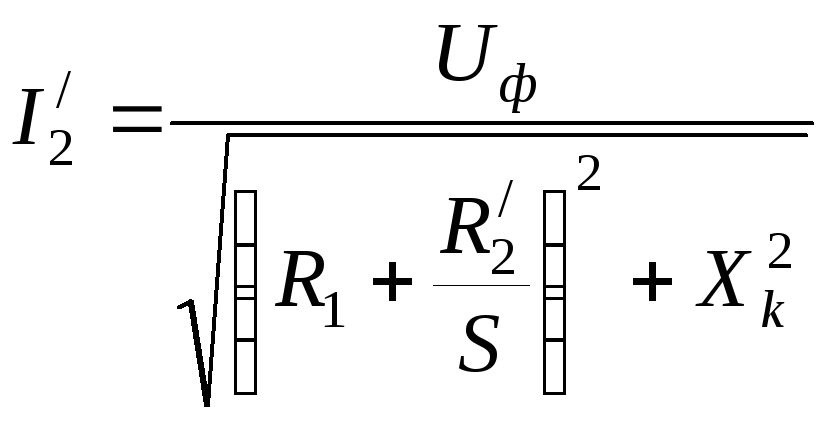
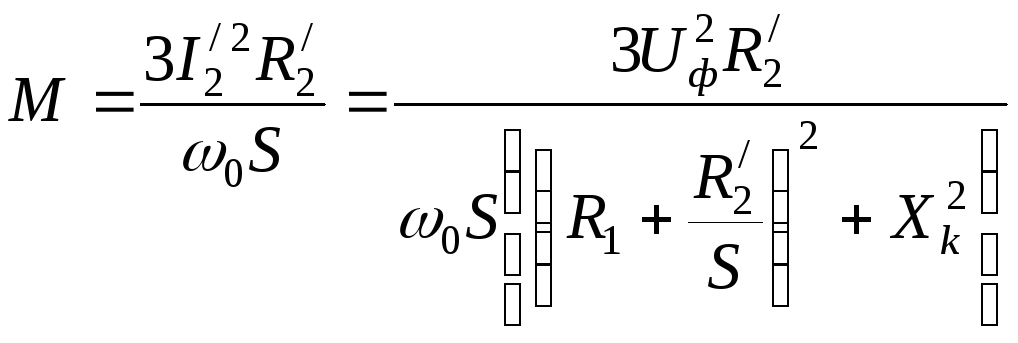
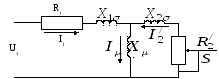
Для получения выражения для эл/маг. момента воспользуемся упрощённой схемой замещения с вынесенным контуром намагничивания на зажимы двигателя.
Тогда, мощность,
передаваемая через зазор:![]()
![]()
При S=0,
![]()
При идеальном холостом
ходе, потребляемый АД
![]() ,
необходим для создания магнитного поля
машины.
,
необходим для создания магнитного поля
машины.
![]()
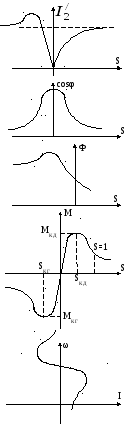
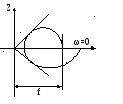
Краново – металлургические
двигатели:
![]()
При изменении
![]() –
двигательный режим.
–
двигательный режим.
![]() –генераторный режим,
выявляется max
М, который имеет место при критическом
скольжении
–генераторный режим,
выявляется max
М, который имеет место при критическом
скольжении
![]() :
:
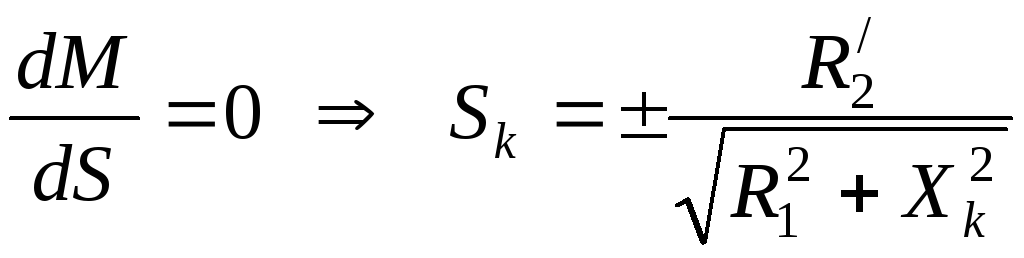 –(“+” – двигательный
режим, “–” – генераторный режим).
–(“+” – двигательный
режим, “–” – генераторный режим).
 –критический момент.
–критический момент.
Уточнённая формула
Клосса:
 ,
где
,
где![]()
У мощных двигателей
![]() и для расчета их характеристик можно
использовать упрощённую формулу Клосса:
и для расчета их характеристик можно
использовать упрощённую формулу Клосса:
 ,
где ω0
– скорость
идеального холостого хода.
,
где ω0
– скорость
идеального холостого хода.
![]() ;
;
![]()
Скорость идеального
холостого хода зависит от
![]() и
и![]() (число
пар полюсов).
(число
пар полюсов). ;
;![]() ;
;![]() ;
;
![]()
![]() ;
;
![]() ;
;![]()
![]()

![]() –двиг. режим.
–двиг. режим.
![]() –генер. режим.
–генер. режим.
![]()
При изменении
![]() подводимая
к двигателю механическая энергия
частично теряется в двигателе в виде
теплоты, а в основном отдаётся в сеть.
Но при увеличенииω
и соответствующем увеличении частоты
тока ротора происходит уменьшение
подводимая
к двигателю механическая энергия
частично теряется в двигателе в виде
теплоты, а в основном отдаётся в сеть.
Но при увеличенииω
и соответствующем увеличении частоты
тока ротора происходит уменьшение
![]() .
Приωгр(Sгр)
отдаваемая в сеть активная мощность
равна 0, т.е. вся подводимая к двигателю
механическая энергия теряется в виде
теплоты в двигателе.
.
Приωгр(Sгр)
отдаваемая в сеть активная мощность
равна 0, т.е. вся подводимая к двигателю
механическая энергия теряется в виде
теплоты в двигателе.
При изменении
![]() –
режим рекуперативного торможения, приω=ωгр
– режим динамического торможения, при
ω>ωгр
– двигатель начинает потреблять энергию
из сети, как при противовключении.
–
режим рекуперативного торможения, приω=ωгр
– режим динамического торможения, при
ω>ωгр
– двигатель начинает потреблять энергию
из сети, как при противовключении.
При пуске S=1,
несмотря на большой пусковой ток , момент
пусковой мал, из-за малости![]() и некоторого снижения потока. По мере
ростаω
уменьшается S,
так как уменьшается индуктивное
сопротивление роторной цепи и быстро
растёт
и некоторого снижения потока. По мере
ростаω
уменьшается S,
так как уменьшается индуктивное
сопротивление роторной цепи и быстро
растёт
![]() ,
несмотря на уменьшающийся
,
несмотря на уменьшающийся![]() момент растёт, а при определённых
значениях
момент растёт, а при определённых
значениях![]() и
и![]() достигает своего критического значения.
При дальнейшем увеличенииω,
несмотря на высокое значение
достигает своего критического значения.
При дальнейшем увеличенииω,
несмотря на высокое значение
![]() ,
быстрое уменьшение
,
быстрое уменьшение![]() ведёт к уменьшения момента до 0, приS=0(холостой
ход).
ведёт к уменьшения момента до 0, приS=0(холостой
ход).
Частотный критерий устойчивости Найквиста
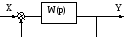
![]() –передаточная функция
разомкнутой системы.
–передаточная функция
разомкнутой системы.
![]()
![]() ,
порядок Q
и D
одинаковый.
,
порядок Q
и D
одинаковый.
![]()
1) Пусть
![]() ,m=0,
разомкнутая система, n–порядок
устойчивости.
,m=0,
разомкнутая система, n–порядок
устойчивости.
![]()
![]()
![]()
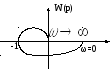
Если разомкнутая система устойчивая, то для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста (годограф разомкнутой системы) не охватывал точки (-1;0), если охватывает – то система неустойчивая.
Если разомкнутая система устойчивая, а годограф Найквиста проходит через точку (-1;0), то замкнутая система на границе устойчивости.
2) Пусть
![]() ,m≠0,
n–порядок
устойчивости; разомкнутая система не
устойчивая и имеет m
правых корней.
,m≠0,
n–порядок
устойчивости; разомкнутая система не
устойчивая и имеет m
правых корней.

В соответствии с
правилом аргумента, замкнутая система
устойчивая, когда годограф Найквиста
охватывает в положительном направлении
точку (-1;0)
![]() раз.
раз.
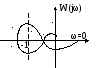
Если разомкнутая
система неустойчивая и имеет m
правых корней, то для устойчивости
замкнутой системы необходимо и достаточно,
чтобы разность положительных и
отрицательных переходов через линию
![]() до
(-1;0) было равно
до
(-1;0) было равно![]() .
.

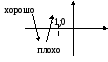
Система устойчива, есть запас по
модулю и по фазе во всём диапазоне частот.
U

γ – запас устойчивости
по фазе.
![]() —
запас по амплитуде и по фазе.
—
запас по амплитуде и по фазе.

Оптимальная структура экскаваторного ЭП. Режим к.з.
Обобщённый критерий Найквиста. Понятие о запасе устойчивости.