


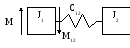
Динамические нагрузки при пуске двухмассовых систем. Пути их снижения.
Понятия о передаточной функции.
Динамические нагрузки при пуске двухмассовых систем. Пути их снижения.
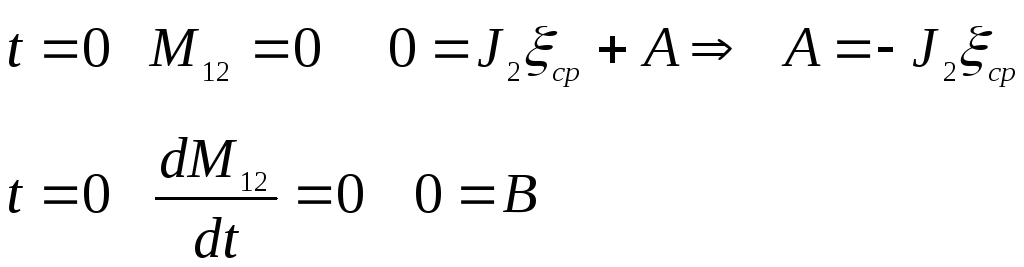
1)
![]()
2)
![]()
3)
![]()
Дифференцируем дважды
(3):
![]()
Вычитаем из (1) (2) и подставляем в полученное:
![]()
![]() ;
;

![]() —среднее ускорение, с
которым двигались бы массы
—среднее ускорение, с
которым двигались бы массы
![]() ,
если бы связь между ними была абсолютной.
,
если бы связь между ними была абсолютной.
Характеристическое
уравнение:
![]() ,
,![]()
![]()
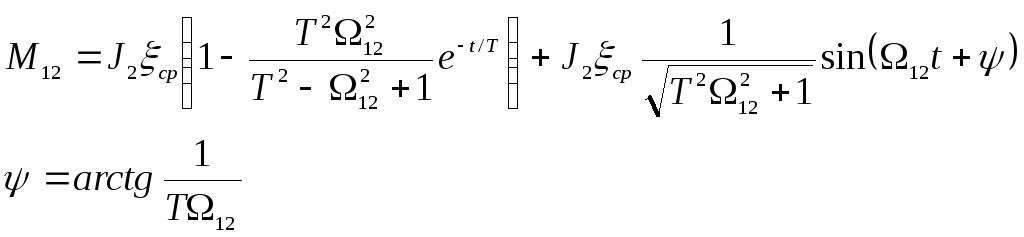
Тогда
![]()
![]() ;
;
![]()
![]() ;
;
![]()
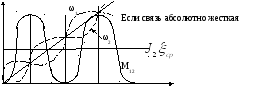
Превышение нагрузки
между массами над средней принято
характеризовать динамическим
коэффициентом:
![]() –
нагрузка в передаче в два раза выше
средней.
–
нагрузка в передаче в два раза выше
средней.
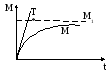
Наиболее рациональным путём уменьшения динамических нагрузок является увеличение плавности нагружения, под которым понимают не скачкообразное приложение момента двигателя к 1-ой массе, а плавное.
![]()
![]()
![]()

![]()
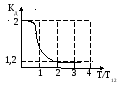 при Т=0, КД=2
при Т=0, КД=2
С увеличением Т, КД уменьшается,
![]() ;
;
![]() –
период собственных
–
период собственных
колебаний.
Существенное снижение КД достигается при
увеличении Т до значения Т12. Дальнейший рост Т существенное снижение КД не даёт и может привести к ухудшению управляемости привода. При ручном оптимально 1.
Понятие о передаточной функции
Д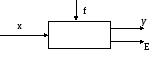 ля
линейной системы применяется принцип
суперпозиций:
ля
линейной системы применяется принцип
суперпозиций:
![]()
Пусть y(t), x(t), f(t) – оригиналы переменных. Тогда:
![]()
![]()
![]()
Считаем, что
![]() тогда
тогда![]() ,
где выражение
,
где выражение![]() является
передаточной функцией.
является
передаточной функцией.
![]()
![]() –передаточная функция.
–передаточная функция.
Передаточные функции сар
 —последовательное
соединение звеньев, передаточная функция
имеет вид:
—последовательное
соединение звеньев, передаточная функция
имеет вид:
![]()
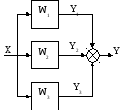
— параллельное
соединение звеньев, передаточная функция
имеет вид:
![]()
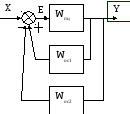
— соединение с обратной связью, передаточная функция имеет вид:
![]()
![]() ,
,
это дробь, в числители, которой передаточная функция звеньев прямой цепи, знаменатель единица плюс сумма произведения прямой цепи на передаточную функцию обратной связи, знак плюс когда обратная связь отрицательная(ООС), знак минус – когда положительная(ПОС).

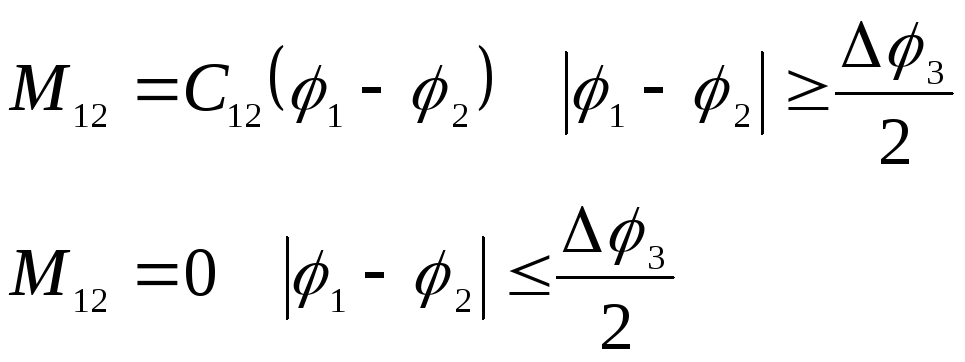
Динамические нагрузки при выборе зазоров. Пути их снижения.
Показать семейство входных Х-К характеристики Ed=f(Id) ведомого сетью инвертора. Какие ограничения накладываются на эти зависимости? Привести аналитическое выражение выходных характеристик инвертора и ограничительной характеристики для трёх фазной схемы.
Динамические нагрузки при выборе зазоров. Пути их снижения.
![]()
![]()
ω1n– скорость, которую будет иметь
двигатель к концу выбора зазора.
Возьмём момент t=0, когда зазор выбран, тогда движение системы будет при наличии момента сопротивления типа сухого трения.
 ;
;
![]() .
.
![]()
![]()
![]()
![]()

![]()
![]()
Единственным путём снижения динамических нагрузок при выборе зазора в оборудовании является ограничение ω1нач, соответствующая концу выбора защора передач.
Показать семейство
входных Х–К характеристик![]() ведомого сетью инвертора. какие
ограничения накладываются на эти
зависимости? Привести аналитическое
выражение входных Х–К инвертора и
ограничительной характеристики для
трёхфазной схемы.
ведомого сетью инвертора. какие
ограничения накладываются на эти
зависимости? Привести аналитическое
выражение входных Х–К инвертора и
ограничительной характеристики для
трёхфазной схемы.
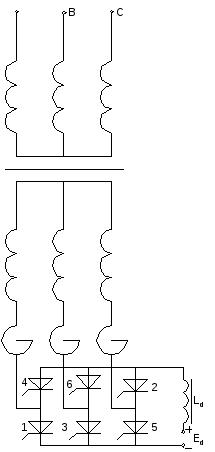
П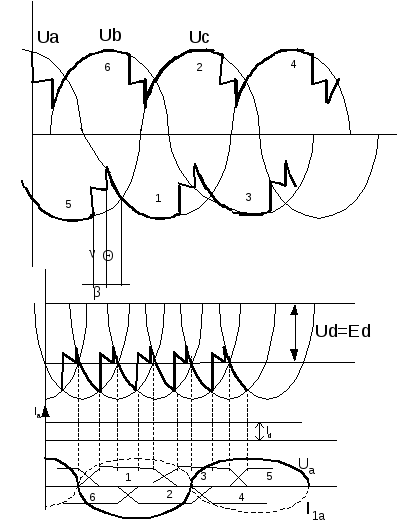 реимущества
по сравнению с однофазной схемой:
реимущества
по сравнению с однофазной схемой:
Лучшее использование тиристоров по току и напряжению.
Улучшенные энергетические показатели, КПД.
Меньшие габариты входного, сглаживающего дросселя.
Предполагаем, что![]() ,
входной ток идеально сглажен
,
входной ток идеально сглажен![]()
![]() .
.
Тиристоры ведомого
инвертора последовательно включаются
в соответствии с тем же алгоритмом, что
и в случае с управляемым выпрямителем
– 1–2, 2-3, 3–4…. Импульсы на отпирание
подаются с углом опережения![]() ,
,![]()
![]() .
.
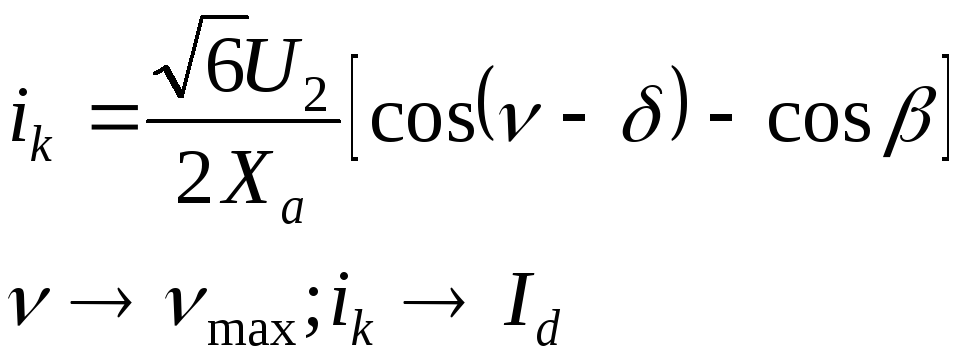
В момент подачи
отпирающих импульсов на очередную пару,
начинается переходный процесс при
котором напряжение в схеме изменяется
по такому же закону, что и в схеме УВ,
т.е. равно полусумме фазных напряжений
фаз, участвующих в коммутации. По
завершению процесса коммутации
![]() .
К тиристорам прикладывается обратное
напряжение на интервале
.
К тиристорам прикладывается обратное
напряжение на интервале![]() (справочные
данные тиристора). К тиристору
прикладывается
(справочные
данные тиристора). К тиристору
прикладывается![]() ,
гдеU2–фазное
напряжение, UAK–
в основном прямое.
,
гдеU2–фазное
напряжение, UAK–
в основном прямое.
Тиристоры включаются тогда, когда векторы тока и напряжения развернуты на 180 градусов, т.е. когда отрицательны. В соответствии с диаграммой входное напряжение инвертора и определяемое им противоэдс будут иметь отрицательную полярность по сравнению с УВ.
Uа в противофазе с i1а, т.е. идёт перекачка энергии.
![]()
![]()
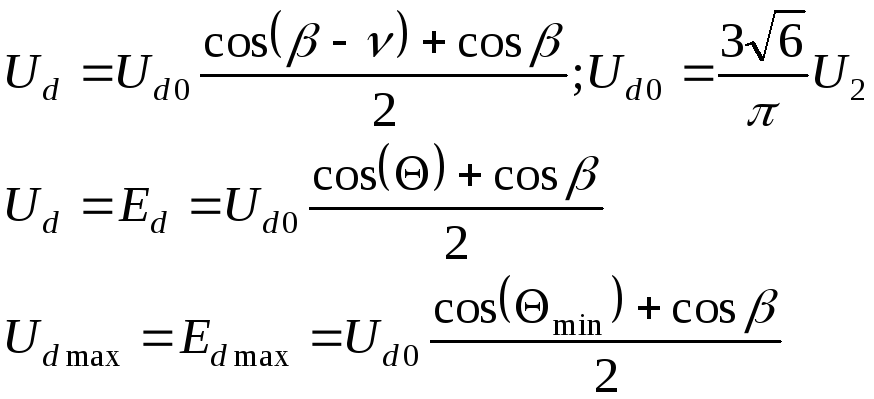
Т.о. выражение для входной характеристики примет вид:
![]()
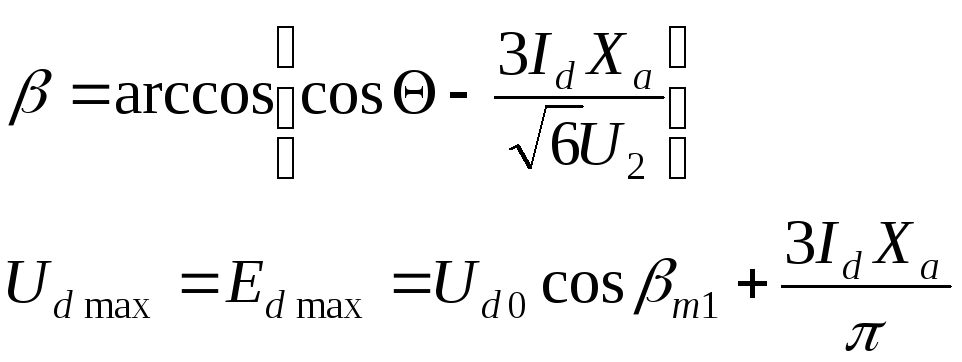
![]()

Киск.=0,955 – коэффициент искажения – степень отклонения формы кривой тока или напряжения от гармонического закона.
Превышение Θmin (выход за ограничительную характеристику) ведёт к аварийному режиму –опрокидывание инвертора(тиристоры не закрываются).

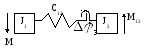
Статические нагрузки двухконцевых лебёдок.
Математическое описание идеальных звеньев, реальных звеньев 1-го и 2-го порядка.