

ed7cec22_biokibernetika
.pdfУправление – переработка воспринятой информации в сигналы, направляющие деятельность машин и организмов. Управление более сложный процесс, состоящий из ряда актов регулирования. Системы, в которых рассматриваются процессы управления, называются управляющими. В них различают две функционально взаимосвязанные части - управляющую (аппарат управления) и управляемую или исполнительную (объект управления), между которыми происходит обмен сигналами. Блок-схему такой системы можно представить в виде:
|
|
|
|
Прямая |
||||
|
|
|
|
связь |
||||
Задание |
|
Управляюща |
|
|
|
Исполнительна |
|
Результат |
|
|
|
|
|
|
|
||
|
|
я часть |
|
|
|
я часть |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обратная |
||||
|
|
|
|
связь |
||||
|
|
|
|
|
|
Обратная |
||
|
|
|
|
|
|
связь |
||
Рис.3.
Процесс управления в функционирующей системе начинается с поступления в управляющий орган информации о поставленной перед системой задаче, о воздействии внешней среды и состоянии элементов системы, включая объект управления. Полученная информация перерабатывается и в виде управляющих команд по каналу прямой связи передается исполнительным устройствам. Эти устройства действуют на параметры объекта управления, вызывают необходимые изменения состояния или действия системы. Информация о результате выполнения команд передается к управляющей части по каналу обратной связи и учитывается при выработке последующих команд.
Таким образом, прямая связь передает управляющую (в виде команд) информацию из управляющей части системы управления в исполнительную. По обратной связи передается осведомительная информация из исполнительной части системы управления в управляющую. Обратная связь означает влияние выходного сигнала системы на ее рабочие параметры, или воздействие управляемого процесса на орган управления
(обычно совместно с внешним воздействием). Различают положительную и отрицательную обратные связи.
Положительная обратная связь – переводит устойчивое состояние равновесия системы в неустойчивое. Любое изменение состояния системы за счет положительной обратной связи усиливается. Причем, зачастую, характер такого изменения состояния системы принимает лавинообразный характер. «Положительная» роль положительной обратной связи в том, что она в случае необходимости способствует переводу системы из одного состояния в другое.
Отрицательная обратная связь - препятствует отклонению какого-либо параметра управляемого процесса от некоторой заданной величины. При этом любое изменение состояния системы за счет этого вида обратной связи «отрицается» (уменьшается) Таким образом, отрицательная обратная связь применяется главным образом для стабилизации параметров процесса.
Обратные связи лежат в основе систем регулирования замкнутого цикла. Сами отклонения объекта от заданного состояния формируют управляющие воздействия, возвращают объект в нужное состояние. Обратные связи придают процессам управления свойства активного приспособления к изменяющимся условиям деятельности.
11
Обратные связи играют огромную роль в живых системах. Отрицательные обратные связи обеспечивают стабильность системы, функций организма, постоянство ее параметров, устойчивость к внешним воздействиям. Они являются основным механизмом гомеостаза, энергетического и метаболического баланса, контроля за численностью популяций и т.д. Положительные обратные связи усиливают процессы жизнедеятельности. Особое значение они имеют для роста и развития. Но часто положительные обратные связи выступают как механизмы «порочного круга», когда болезненные воздействия, нарушающие норму, вызывают в организме изменения, еще более благоприятствующие их действию. Например, сердечная недостаточность ухудшает кровоснабжение миокарда и еще более ослабляет его сокращение.
Таким образом, если отрицательные обратные связи способствуют восстановлению исходного состояния системы, то положительные обратные связи уводят организм и его функции дальше от исходного состояния.
1.6. Возможные виды регулирования в кибернетических системах.
Управление бывает двух видов – прямое и автоматическое. При прямом управлении человек-оператор непосредственно воздействует с помощью управляющей части на объект управления, вызывая в системе желательные изменения. Например, вождение автомобиля. При таком управлении требуется непрерывное наблюдение за системой для учета внешних воздействий.
Чаще управление осуществляется без участия оператора с помощью специального устройства – автоматического регулятора. Автоматическое регулирование – процесс поддержания или изменения в соответствии с заданными условиями какой-либо величины
(параметра) системы. Задача регулятора – управляющим воздействием скорректировать вредное действие внешних воздействий (возмущений) на процесс функционирования системы. Возмущение – внешнее воздействие на процесс функционирования кибернетической системы. При автоматическом регулировании применяются два основных метода: регулирование по возмущению и регулирование по отклонению
(рассогласованию).
1.6.1. Регулирование по возмущению.
Если управляющая система не учитывает информацию от объекта управления, т.е. в ней отсутствует обратная связь, то она называется разомкнутой. В режиме разомкнутой системы осуществляется автоматическое управление (регулирование) по возмущению. Если характер возмущения (внешние воздействия) заранее известен или оно может быть непосредственно измерено, то система регулирования содержит устройство (измерительное, см. рис.4а), учитывающее это возмущение, и вырабатывает в управляющей части компенсирующие команды.
12

Рис.4
Например, автоматическое регулирование температурного режима в помещении с помощью кондиционера. Возмущение (температура наружного воздуха) воздействует на измерительное устройство (специальный термометр, см. рис.5) и оказывает влияние на температуру воздуха в помещении.
Рис.5.
Термометр в зависимости от возмущения подает сигнал кондиционеру для включения его либо в режиме нагревающего устройства, либо охлаждающего. Воздух соответствующей температуры поступает в помещение. Существенно, что в этой системе нагревание или охлаждение воздуха в помещении зависит от температуры окружающей среды, а не от температуры воздуха в помещении.
Развитием этого метода является предупредительное регулирование. В подобной системе в управляющей части имеется особое прогнозирующее устройство (см. рис.4б), анализирующее ситуацию, при которой возможно появление того или иного возмущения. В этом случае регулирующее воздействие вырабатывается заранее и, таким образом, предупреждаются возможные последствия от действия возмущения.
Регулирование по возмущению имеет ограниченное распространение, так как в реальных условиях предвидеть появление возмущения или его характер далеко не всегда возможно. Однако для биологических систем достаточно высокого уровня часто характерно предупредительное регулирование по возмущению, называемое в данном случае прогностическим. В высших отделах центральной нервной системы при анализе условий внешней среды происходит «предугадывание» грозящих организму «возмущений» и вырабатываются реакции, предупреждающие нежелательные для организма последствия.
13

1.6.2. Регулирование по отклонению
Более универсальным и распространенным является регулирование по отклонению. В этом случае используются отклонения системы от заданного режима для формирования управляющего воздействия, компенсирующего это отклонение. Достигается это с помощью отрицательной обратной связи, наличие которой характерно для любой системы автоматического регулирования по отклонению. В этом случае в управляющей части системы происходит сравнение действительного значения выходного параметра, характеризующего режим системы, с введенными на вход управляющей части его заданными значениями.
Рис.6
В системе автоматического регулирования по отклонению происходит круговой обмен информацией: от управляющей части (регулятора) к исполнительной части посылаются команды, устанавливающие определенный режим функционирования системы; сигналы с выхода системы о фактических данных режима и работы, воспринятые соответствующими датчиками, передаются через цепь обратной связи на вход управляющей части системы. Управляющая часть содержит аппарат сравнения (см. рис.6) полученной информации с заданными величинами, в которых устанавливаются знак и величина разности между ними (регулирование по рассогласованию или по ошибке) и вырабатываются корректирующие команды, устраняющие имеющие место отклонения.
Например, поддержание заданной температуры с помощью термостата, в котором используется контактный термометр.
Рис.7.
При температуре ниже заданной нормы ртутный столбик в термометре (см. рис.7) разрывает контакт в цепи реле, оно включает нагреватель и температура повышается. При температуре выше заданной нормы ртутный столбик в термометре замыкает контакт в цепи реле, и нагреватель выключается. С каждым циклом отклонение температуры от
14
заданной становится все меньше и меньше. Таким образом, происходит стабилизация температуры в термостате.
1.6.3. Виды регулирования по отклонению.
Системы автоматического регулирования по отклонению делят на следующие
виды:
а) системы стабилизирующиеся б) системы, работающие по программе в) следящие системы.
Стабилизирующиеся системы – системы, поддерживающие постоянное заданное значение одной или нескольких регулируемых величин с определенной степенью точности при произвольно меняющихся внешних воздействиях (например, устройство для поддержания постоянной скорости вращения электрического генератора). Основным видом стабилизирующего регулирования в биологических системах является гомеостаз
(правильнее гомеостазис). Гомеостаз – это поддержание на постоянном уровне процессов метаболизма, соответствующего оптимальным условиям жизнедеятельности организма. Путем гомеостаза обеспечивается постоянство оптимального уровня таких показателей, как, например, пульс, дыхание, температура тела, давление крови и т д. Допустим, в клетках метаболизм поддерживается на определенном уровне за счет того, что выработка ферментов зависит от концентрации продуктов биохимических реакций, которые происходят с участием этих ферментов. С увеличение концентрации продуктов реакции активность выработки клетками ферментов падает и наоборот возрастает при
снижении их концентрации (отрицательная обратная связь). |
– системы, в |
Системы автоматического регулирования по программе |
управляющую часть которых вводится программа, т.е. совокупность заданных величин или данных, характеризующих режим исполнительной части, которые должны быть реализованы на выходе системы. Сигналы обратной связи с выхода системы сравниваются с данными программы и по результатам сравнения вырабатываются управляющие команды. Автоматическое регулирование по программе широко распространено в современной технике. Например, автоматическое управление станками, конвейерными линиями, движением кораблей, самолетов и т.д. Ряд процессов в живых организмах происходят в соответствии с программами, заложенными в определенных структурах (например, программы деления клетки в структуре ДНК и другие).
В следящих системах данные, в соответствии с которыми регулируются выходные сигналы, поступают на вход системы не в виде составленной программы, а в виде сигналов, изменяющихся во времени по определенному закону. При этом выходные сигналы воспроизводят сигналы, поступающие на вход, с заданной степенью точности. Например, система управления направлением движения корабля, при которой соответствующее механическое устройство повторяет повороты управляемого вручную штурвала и тем самым поворачивает руль корабля.
1.6.4. Экстремальное, оптимальное и адаптивное регулирование.
Во всех рассмотренных случаях перед системой ставилась задача поддержания выходных параметров в соответствии с заданными значениями. Более сложные задачи решаются при экстремальном и оптимальном регулировании.
При экстремальном регулировании перед системой ставится задача отыскания и поддержания такого режима функционирования, которое обеспечивает экстремальное (максимум или минимум) значение некоторых заданных величин на выходе системы. Эта задача решается с помощью специального устройства, называемого «оптимизатором». На выходе системы в этом случае включают прибор, который в дискретные моменты времени измеряет значения выходной величины. Эти значения передаются на оптимизатор.
15

Оптимизатор их анализирует и с помощью управляющей части системы вырабатывает необходимые команды.
Основной метод работы оптимизатора – шаговый поиск. Шаговый поиск – поиск оптимального решения путем изменения на некоторую величину (шаг) одного или сразу нескольких параметров процесса с последующим анализом результата и корректировкой величины и направления шага. Т.е. если изменение результата соответствует желаемому направлению, то изменение регулирующих параметров идет в том же направлении до тех пор, пока результат (регулируемая величина) не достигнет экстремального значения. В противном случае направление поиска меняется на противоположное.
Оптимальное управление – это управление сложными объектами, основанное на том же принципе. В этом случае перед системой ставится задача обеспечить экстремальное значение некоторого обобщенного показателя (критерия качества) или эффективности функционирования системы, связанного с ее выходными данными (см.
рис.8.).
Рис.8.
При этом на основании измеренных выходных данных вычисляется («вычислитель» на блок-схеме, рис.8) текущее значение этого критерия. Оно поступает затем в оптимизатор, в котором происходит сравнение с заданным значением такого критерия, поиск оптимального направления, а затем вырабатываются соответствующие управляющие команды. Таким образом, отличие оптимального регулирования от экстремального состоит в том, что происходит оптимизация не отдельно каждого из нескольких результатов функционирования системы, а их совокупности, причем во взаимосвязи и взаимодействии их. В некотором смысле по принципу: «и волки сыты, и овцы целы».
В рассмотренных системах основная программа или алгоритм функционирования системы в процессе регулирования не изменялись. Регулированием обеспечивалось
только поддержание |
или оптимизация выходных данных при действии |
на |
систему |
||
непредвиденных ранее возмущений. |
Однако существует класс таких систем, в устройстве |
||||
которых заложена |
возможность |
автоматического |
изменения самого |
алгоритма |
|
функционирования |
с целью улучшения качества |
функционирования |
в |
заданном |
|
направлении или приспособления системы к резко изменившимся условиям. Автоматическое регулирование в таких системах называется адаптивным («приспосабливающимся») управлением, а сами системы – адаптивными или самоприспосабливающимися. В свою очередь они делятся на виды:
самонастраивающиеся и самоорганизующиеся, обучающиеся и самообучающиеся,
самосовершенствующиеся и т.д. Разберем принцип их работы на примере обучающихся систем.
16
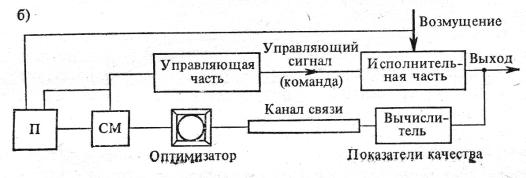
Рис.9.
В них критерий оптимального функционирования заранее не вводится, он вырабатывается системой в процессе обучения при выполнении задач определенного круга. Для этого в систему вводятся основные принципы поиска оптимального решения. В соответствии с этими правилами система сама находит необходимую последовательность операций, которую запоминает и использует в дальнейшем в аналогичных ситуациях. Алгоритм работы обучающихся систем строится на методах проб и ошибок, шагового поиска и отбора вероятностей. На рис.9 показана схема обучаемого автомата адаптивного оптимального управления. В нем имеются: блок накопления опыта (память ) П, в котором фиксируются связи между возмущениями и ответными действиями, одобренными в процессе обучения, и блок СМ, в котором эти данные сопоставляются с данными оптимизатора и вырабатывается общий сигнал, поступающий в управляющую часть системы.
Адаптивное регулирование (все его виды) играет большую роль в живых организмах. В данном случае оно заключается в изменении программ, заложенных в структурах организма, в связи с изменением условий внешней среды. Адаптивное регулирование не только обеспечивает поддержание жизнедеятельности организма в изменяющихся внешних условиях, но и является средством повышения внутренней организации системы, что лежит в основе ее дальнейшей эволюции.
2.Моделирование как метод кибернетики.
2.1.Классификация моделей. Особенности моделирования кибернетических систем.
Наличие сходных черт у различных объектов давно было положено в основу научного подхода к изучению природы самых разнообразных явлений. Практически во всех науках в явной или неявной форме вводится понятие модели, которая и отражает сходные черты изучаемых объектов и явлений. Но нигде идея моделирования не проводится так четко и последовательно, как в кибернетике; здесь она фигурирует в наиболее общей форме и является фундаментальном понятием, определяющим методологию изучения кибернетических систем.
Моделированием называется метод исследования, при котором действительный объект изучения (предмет или явление) вследствие его сложности заменяется более удобным для рассмотрения, исследование и управления - моделью.
Понятие модели основывается на наличии некоторого сходства между двумя объектами, при этом слова «сходство» и «объект» понимаются в широком смысле. Сходство может быть чисто внешним или по внутренней структуре внешне совсем не
17
похожих объектов; оно может касаться определенных черт поведения объектов, не имеющих ничего общего ни в отношении формы, ни в отношении структуры.
Модель - это искусственно созданная система (материальная или умозрительная), в которой передано некоторое определенное сходство (структура, функции и других черт) с системой - оригиналом.
Существуют два уровня соответствия модели системы оригиналу. Модель и оригинал изоморфны, если связи между их элементами находятся во взаимно однозначном соответствии, при этом каждая из систем может быть моделью другой. Модель и оригинал гомоморфны, если соответствие осуществляется только в одну сторону
Исследователь, создавая модель некоторой системы, стремится воплотить в ней
наиболее |
существенные черты оригинала, опуская в то же время иные существенные |
|||
черты в |
целях |
упрочения |
модели, средства |
моделирования, имеющиеся у |
исследователя, |
как правило, |
ограниченны. |
Например, искусственное сердце, |
|
являющееся моделью естественного сердца, обладает далеко не всеми свойствами последнего: не меняет своего ритма при изменении состава крови, появления в ней гормонов, не способно трепетать от радости или давать перебои от страха и.т.д. Модель всегда проще оригинала. Между моделью и оригиналом наряду со сходством обязательно имеются более или менее существенные различия. Поэтому информация, полученная на основе изучения модели, носит не абсолютно достоверный характер, а более или менее приблизительный, и нуждается в дальнейшем уточнении и корректировке.
При подробно детализированной классификации различают более десяти классов и подклассов моделей. Paссмотрим четыре основные вида моделей.
Геометрические (внешние) модели представляют собой некоторый объект,
геометрически подобный оригиналу, т.е. это внешнее копирование оригинала. Например, протез кисти руки, глаза, имеющие косметическое назначение, или муляжи, используемые с познавательной целью.
Физические модели отражают подобие между оригиналом и моделью не только с точки зрения их форм и геометрических соотношений, но и с точки зрения происходящих в них основных процессов. Т.е. она одинакова по природе с оригиналом и точно воспроизводит его, отличаясь только масштабными коэффициентами. Эти коэффициенты представляют соотношение соответствующих параметров модели и оригинала. Например, физическую модель сердечнососудистой системы можно представить в виде замкнутой, многократно разветвленной, заполненной жидкостью системы трубок с эластичными стенками. Движение жидкости в ней происходит при действии ритмически работающего насоса в виде резиновой груши. Основные гидродинамические процессы, происходящие в данной модели и сердечнососудистой системе, подобны. К физическим моделям также можно отнести технические устройства, которые временно или постоянно заменяют органы и системы живого организма: аппараты искусственного кровообращения (модель сердца), искусственного дыхания (модель легких), кардиостимуляторы, искусственные клапаны сердца и др.
Физические модели широко используются в космонавтике, кибернетике, бионике и т.д. Например, определение аэродинамических свойств летательного аппарата путем продувки их моделей в аэродинамической трубе; исследование на моделях особенностей работы атомных реакторов, линий электропередач и т.д.
Аналоговая модель представляет собой материальную систему, в которой происходят иные физические процессы, чем в оригинале, но те и другие описываются одинаковыми или аналогичными математическими выражениями. Для пояснения рассмотрим следующий пример.
В механике свободные (затухающие) колебания описываются линейным дифференциальным уравнением вида:
18
|
d2s |
|
ds |
|
||
m |
|
|
r |
|
ks 0 , |
(8) |
dt |
2 |
|
||||
|
|
dt |
|
|||
где m - масса тела, s- смещение тела, r - коэффициент трения, k - коэффициент упругости.
Затухание колебаний происходит по экспоненциальному закону С другой стороны, затухающе электрические колебания, происходящие в
закрытом колебательном контуре, описываются линейным дифференциальным уравнением:
L |
d2q |
R |
dq |
|
1 |
q 0 , |
(9) |
|
dt |
2 |
dt |
|
|||||
|
|
|
c |
|
||||
где L – индуктивность катушки, R – омическое сопротивление контура, с – ёмкость конденсатора, q - заряд на конденсаторе.
Эти колебания тоже происходят по экспоненциальному закону. Сравнивая уравнения (1) и (2), видим, что они имеют одинаковую структуру:
a |
d2 x |
a |
|
dx |
a |
|
x 0 , |
|
(10) |
|||
|
2 dt |
|
|
|||||||||
1 dt2 |
|
|
3 |
|
|
|
1 |
|
||||
где х выполняет роль s и q; a - соответствует Lи m; a |
2 |
- k и |
. |
|||||||||
|
||||||||||||
1 |
|
|
|
|
|
|
|
с |
||||
|
|
|
|
|
|
|
|
|
|
|||
Из приведенных линейных дифференциальных уравнений (8) и (9) очевидно, что любой из описываемых процессов является аналогом или моделью другого. На это важное обстоятельство указывал В.И.Ленин: "Единство природы обнаруживается в поразительной аналогичности дифференциальных уравнений, относящихся к разным областям явлений".
При аналоговом моделировании чаще всего физические процессы в оригинале заменяются тождественными им электрическими. При этом исследуемые физические величины отождествляются с электрическими (током, напряжением, сопротивлением и др.). Например, движение крови по крупным сосудам моделируется цепочкой соединенных сопротивлений R , емкостей С, индуктивностей L; на вход цепочки подается импульс тока, эквивалентный пульсу. Прохождение импульса тока по цепочке и движение крови по крупным сосудам описывается системой аналогичных дифференциальных уравнений. Эта модель позволяет установить взаимную зависимость давления и объемной скорости кровотока, а также их изменение по ходу сосуда и во времени.
В настоящее время созданы аналоговые модели различных физиологических систем: электрические модели сердечнососудистой системы, кровообращения, электронная модель зрительной системы, логическая модель памяти и др.
Математические модели - это абстракция, описание оригинала математическими символами, практически - совокупность математических соотношений, описывающих изучаемое явление. При создании математической модели используют те же физические закономерности, которые выявлены при опытном изучении объекта. Например, математические модели электрических явлений в тканях, органах основаны на законах электродинамики, а модели кровообращения - на законах гидродинамики.
Чаще всего математическая модель процесса - это система дифференциальных уравнений той или иной степени сложности. В них переменными являются искомые параметры состояния системы, а коэффициенты при них и различные постоянные зависят от свойств изучаемой системы и внешних воздействий на неё. Исследование математической модели состоит в решении этих уравнений, т.е. нахождении искомых переменных для заданных условий. Решение сложных систем уравнений обычно производится с помощью аналоговых или цифровых ЭВМ. Путем многократного решения уравнений модели с данными, соответствующими различным внешним воздействиям, можно установить зависимость состояния или поведения системы от этих воздействий.
19
При построении математической модели можно условно выделить четыре взаимосвязанных основных этапа:
1.Изучение процесса или явления и сбор данных о его параметрах.
2.Построение модели явления с помощью цифровых или символических знаков.
3.Проигрыш возможных результатов на модели и выявление наиболее целесообразного вероятного исхода и корректировка ее с учетом полученных результатов.
4.Реализация полученных при моделировании результатов, т.е. использование модели по необходимости.
Математическое моделирование как метод исследования обладает целым рядом
несомненных достоинств: язык математики точен и экономен; правильно составленная модель позволяет уменьшить время исследования, сократить число ответов, изучать системы в таких условиях, которые трудно или даже невозможно создать в экспериментах.
В биологии и медицине часто применяются биологические предметные модели. К
ним относятся лабораторные животные, изолированные органы, культуры клеток, суспензии органелл, фосфолипидные мембраны и др. Они позволяют изучать общие биологические закономерности, патологические процессы, действие различных препаратов, методы лечения и т.д.
При моделировании сложных систем удобно пользоваться понятием "черного ящика", введенным У.Р. Эшби. «Черным ящиком называется система, заданная совокупностью входных и выходных параметров, внутренняя структура и протекающие в ней процессы неизвестны. Основная задача при исследовании такой системы заключается в том, чтобы путем длительного наблюдения установить характер функции, связывающей входные и выходные параметры. Такая функция называется передаточной функцией системы.
Проблемы «черного ящика» возникают и в повседневной жизни, и во врачебной практике. Организм можно рассматривать как «черный ящик»: на «входе» действуют различные патологические раздражители, а на «выходе» мы получаем многочисленные проявления заболевания, которые регистрируются тем или иным способом. На основании жалоб, анамнеза, осмотра и данных первичного исследования у врача возникает предположение о вероятном диагнозе, которое в ходе дальнейших исследований и лечения уточняется, корректируется или полностью отвергается.
По методу «черного ящика» работают и психологи, наблюдая, фиксируя, и анализируя поведение людей в различных жизненных ситуациях, задавая испытуемым специально разработанные тесты и т.д. В общем, метод "черного ящика" состоит в том, что бы не вникая в структуру системы, сделать заключение о принципах её работы, наблюдая только вход и выход системы.
В связи с их большой сложностью моделирование физиологических систем имеет свои особенности. Различает два подхода к моделированию этих систем. Первый подход
состоит в изолированном изучении свойств определенной системы, причем влияний на неё других систем считается несущественным. Модели изолированных физиологических систем создаются, как правило, для описания сравнительно простых ситуаций - только в этом случае рассматриваемые модели дают адекватное описание процессов. В качестве примеров первого подхода к моделированию физиологических систем можно привести изолированные модели дыхания, кровоснабжения, терморегуляции организма и др.
Второй подход состоит в моделировании целостного организма или нескольких взаимосвязанных физиологических систем и отличается значительной сложностью. Определяющим здесь является не сам факт одновременного рассмотрения нескольких систем, а взаимное влияние происходящих в них процессов, При переходе от изолированных систем к связанным исследователь вынужден усложнять модели, вводя в
них "перекрестные" связи. Моделирование связанных систем представляет собой новый
20