

40. Схема синхронизации цифрового устройства на дешифраторе.
Для
получения синхросигнала Z
можно использовать другую схему
синхронизации, приведенную на рисунке.
Она дороже предыдущей, так как использует
более дорогие элементы (дешифратор и
триггеры), но она позволяет легче изменять
синхросигнал (сдвигать его по тактам).
Часто это требуется при первоначальной
наладке устройства путем переключения
входов логической схемы на другие выходы
дешифратора.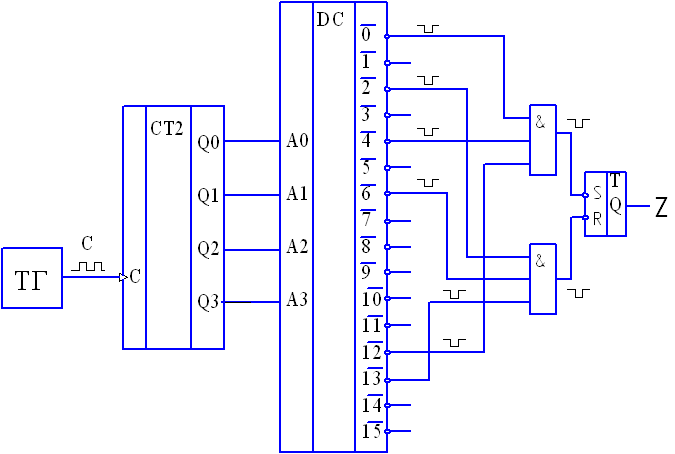
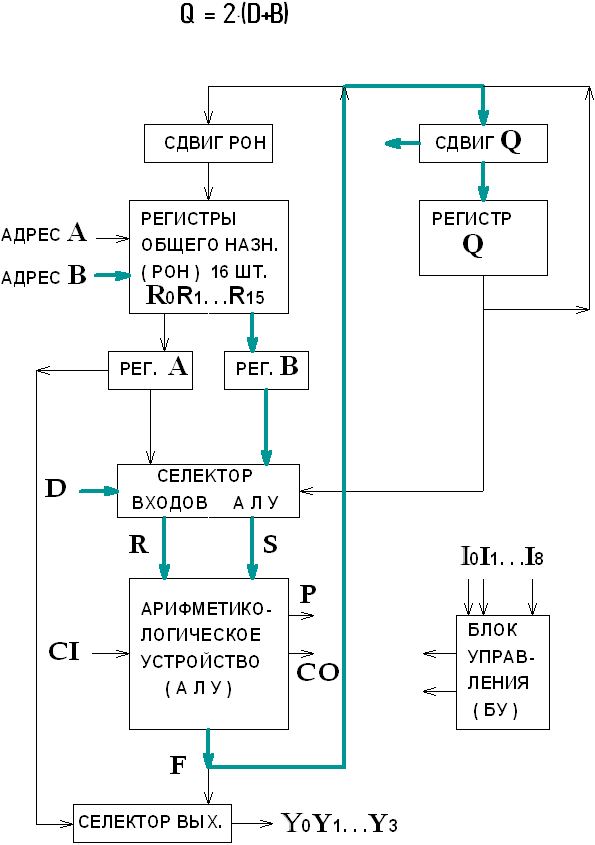
41. Схема информационных потоков на примере микропроцессора к1804 вс1.
Многие
информационные системы представляют
собой сети линий передачи информации
(каналов) между различными устройствами,
преобразующими эту информацию. Один
пример такой сети – логические схемы.
В такой сети по каждой линии передается
значение одной двоичной переменной,
это минимальное количество информации
– один бит. В других сетях по линиям
(каналам связи) передается значительно
большее количество информации. В качестве
примера можно взять микропроцессор
ВС1. При выполнении каждой команды в
этом устройстве используются различные
элементы и линии связи. Ниже на рисунке
представлены потоки информации в
микропроцессоре ВС1 при выполнении
команды: Q
= 2∙ (D+B).
Отдельные элементы микропроцессора
связаны четырехбитными линиями (четырьмя
проводами, передающими по одному биту).
При выполнении команд используется
лишь часть всех имеющихся элементов
системы и соответственно часть линий
связи. Рассматриваются потоки информации,
которые непрерывны, то есть исправный
канал передачи информации должен
передать ее без потерь. На рисунке для
указанной вверху операции потоки
информации показаны утолщенными линиями
на структурной схеме микропроцессора.
Слагаемое D
поступает с внешнего одноименного входа
D,
на селектор входов АЛУ и далее на вход
АЛУ R.
Второе слагаемое В читается из регистра
общего назначения (РОН) по адресу В в
Рег.В и далее проходит через селектор
входов АЛУ на вход АЛУ S.
Полученная сумма F
поступает на сдвигатель Q,
где выполняется сдвиг на один разряд
вправо, что равносильно умножению на
2, и далее записывается в регистр Q.
42. Определение понятий «управление, объект управления, состояние объекта управления»; примеры.
Управление – целенаправленное воздействие на объект, в результате которого он переходит в требуемое состояние. Управление рассматривается как процесс во времени. Объект управления (ОУ) – часть окружающего нас мира, на которую можно воздействовать с определенной целью. Состояние объекта управления – набор параметров, характеризующих его в каждый момент времени. Успехи в области электроники, вычислительной техники (аппаратуре, программировании) и многом другом позволили внедрить автоматизацию в самые разнообразные области, от маленьких электродвигателей до глобальных систем спутниковой навигации. Сама ЭВМ (компьютер) часто также является объектом управления, например, управление ее тепловым режимом, система энергосбережения и т.д. Можно сказать, что она сама собой управляет. Изучая работу самой ЭВМ можно узнать о новейших приемах автоматического управления самыми разнообразными объектами с помощью ЭВМ.