

12. Основные команды управления траекторией движения промышленного робота
|
Команда |
Описание |
|
GOREADY |
Выйти в исходное положение |
|
SPEED |
Скорость движения до следующего объявления |
|
GONEAR |
Передвигаться к точке на заданное расстояние от неё |
|
SPEEDNEXT |
Скорость следующей команды |
|
GOS |
Движение по прямой с максимальной точностью |
|
CLOSE |
Включить излучатель |
|
DELAY |
Задержка излучателя |
|
OPEN |
Отключение излучателя |
|
GO |
Движение по прямой |
|
END |
Конец программы |
13. График движения между двумя точками, торможение
Рассмотрим простую задачу перемещения тела массой m из точки 0 в точку у , как показано на графике. Трение для простоты не учитывается. По горизонтали задано время t, по вертикали заданы: пройденный путь S, скорость V, ускорение a. Можно выделить 3 интервала времени:
1.
Разгон, 0-А, t1,
на массу m
действует сила F,
создавая ускорение a
= F/m
, скорость растет до значения V
= a∙t1,
пройден путь S1
= a∙t12
/2, затрачена энергия W
= m∙V2/2.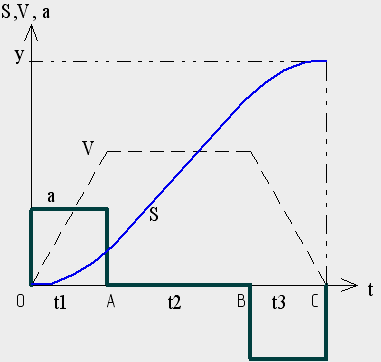
2. Равномерное движение, А-В, t2, сила F=0, поэтому ускорение a = 0, скорость постоянна, пройден путь S2 = V∙ t2.
3. Торможение, В-С, t3, действует сила торможения в обратном направлении -F , замедление –a до остановки V =0, пройден путь S3 = a∙t32 /2, выделена энергия W = m∙V2/2 .
Такой график движения широко распространен, например, в станках, роботах, на железной дороге, в метро, в лифте и т.д., при желании это можно наблюдать.
14. Многокоординатное управление движениями, влияние технологического процесса и размера партии изготавливаемых деталей, пример
На рисунке приведен простой пример вытачивания конуса на токарном станке двумя вариантами движений:
1. слева показана работа одновременно продольной Z и поперечной Y подачи; в этом случае нужно точно согласовывать оба движения по началу, концу и соотношению скоростей; если это соотношение нарушится, как показано преувеличенно в середине конуса, то получится брак;
2. справа показан значительно более простой и надежный вариант одного движения, однако здесь нужно выставлять фиксированное направление движения Z конструкцией станка, менять угол конуса путем изменения отношения скоростей подач не удастся.
Левый
вариант требует более сложного управления
одновременно двумя движениями и подходит
для ЧПУ. Более простой правый вариант
подходит для реализации на агрегатном
станке.
15. Позиционное и контурное управление движениями
Различают два типа управления движением - позиционное и контурное. В позиционной системе управления задаются отдельные точки пространства, куда нужно выставлять инструмент, например, при точечной сварке, при сверлении отверстий, заданных координатами (координатно-сверлильные станки) и т.д. Здесь можно допустить перебеги с возвратом. В контурной системе управления обеспечивается движение инструмента по заданной траектории с заданной скоростью, например при шовной сварке нужно провести инструмент по линии шва. Для токарного станка с ЧПУ (числовое программное управление) также нужна контурная система управления. Хотя траекторию можно представить как последовательность точек, в контурной системе нужно еще обеспечить скорость движения и не допускать перебегов, поэтому она сложнее позиционной системы.