

1.5.3. Производящая функция для чисел Фибоначчи
Числа Фибоначчи – это элементы числовой последовательности, в которой каждый последующий элемент равен сумме двух предыдущих. Т.е. последовательность чисел Фибоначчи задается рекуррентным уравнением:
![]()
Воспользуемся понятием производящей функции для выражения общего члена чисел Фибоначчи.
Возьмем в качестве
последовательности базисных функций
![]() .
.
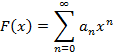
Ряд

сходится
при ![]() и определяет производящую функцию
и определяет производящую функцию
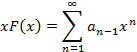
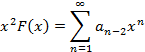
Помножив данное
выражение на xи на![]() ,
получим:
,
получим:
Сложив эти два выражения имеем:
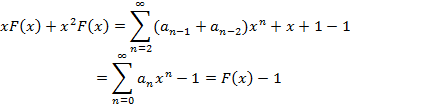
Следовательно
![]() .
.
Отсюда получается явный вид производящей функции
![]()
Корни знаменателя определяются из уравнения
![]()
![]()
Разложим F(x)на элементарные дроби, т.е.

![]()
![]()
![]()
Т.е. получим

Рассмотрим сумму бесконечно убывающих геометрических прогрессий
При ![]()
Следовательно
Отсюда

1.6. Z - преобразование
1.6.1. Определение z– преобразования
При анализе и синтезе дискретных устройств широко используется Z–преобразование, играющее по отношению к дискретным сигналам такую же роль, как интегральное преобразование Фурье и Лапласа по отношению к непрерывным сигналам. Рассмотрим основы теории этого функционального преобразования и некоторые его свойства.
Одностороннее Z-преобразование последовательностиx(n) определяется формулой:
где
z
– комплексная переменная , а n
интерпретируется как дискретное время.
Из этого следует, что Z-
преобразование представляет собой
частный случай производящей функции в
которой в качестве базисной используется
последовательность
![]()
Рассмотрим ряд примеров.
Пример 1. НайтиZ-преобразование единичного импульса.
Решение. Т.к.
Пример 2. Найти Z-преобразование единичного сигнала
Решение. В
данном случае![]() ,
для
,
для![]()
Данный
ряд представляет собой бесконечную
сумму убывающей геометрической
последовательности знаменатель который
![]() . Следовательно
. Следовательно![]()
![]() сходится
при
сходится
при
![]()
Пример 3. НайтиZ– преобразование
экспоненциальной последовательности
Решение.
ВычисляяZ-преобразование,
получим![]()
![]() сходится
при
сходится
при
![]()
1.6.2. Обратное преобразование
Очень важно уметь переходить не только от последовательности к ее Z– преобразованию, но и обратно от Z–преобразования к последовательности. Последний переход формально определяется соотношением
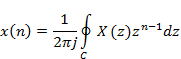
В правой части этого равенства стоит контурный интеграл в z-плоскости по любому замкнутому контуру в области сходимости, охватывающему начало координат.
Обратное Z-преобразование можно найти несколькими способами:
Прямым вычислением контурного интеграла с использованием теоремы о вычетах
Разложением
 на простые дроби
на простые дробиОбычным делителем числителя
 на
его знаменатель.
на
его знаменатель.Разложением в степенной ряд.
Мы ограничимся рассмотрением двух первых из них.
Первый способ основан на известной теореме из курса теории функций комплексного переменного, позволяющего вычислить контурный интеграл через вычеты.
![]()
Рассмотрим
пример 4, в котором ![]()
В
этом случае мы имеем простой полюс в
точке ![]() .
Следовательно:
.
Следовательно:![]() .
.
При использовании второго способа Z-преобразование записывается в виде суммы простых дробей

Т.к.
каждое слагаемое ![]() имеет обратноеZ-преобразование
вида
имеет обратноеZ-преобразование
вида![]() ,
получим
,
получим
Например, рассмотрим выражение
![]()
Его можно записать в виде

![]()
В
результате получаем ![]()
1.6.3. СвойстваZ-преобразования
1) Линейности
![]()
2) Задержки
![]()
где ![]() – функция единичного скачка
– функция единичного скачка
3) Умножения на экспоненту
![]()
4) Умножения наn
![]()
5) Опережающего сдвига
![]()
6) Свертки
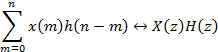
Указанные свойства упрощают получение преобразований и их обращений.