

&_ИДО_СТУДЕНТАМ_(Эл. энерг. СиС)_2013г.) / PDF_Уч. пос._Мастерова / глава9(2009)
.pdf9. Устойчивость нагрузки
Как уже было отмечено выше, система электроснабжения содержит питающие и распределительные линии электропередачи, трансформаторы, компенсирующие устройства и непосредственно установки потребителей электроэнергии. При анализе устойчивости можно исследовать поведение как отдельных электроприемников, так и узлов нагрузки. Узлами нагрузи называются точки СЭС, в которых происходит отбор и распределение мощности для питания групп потребителей электрической энергии с различными конструктивными характеристиками и режимами работы [ 7].
Состав узлов нагрузки может быть различен. Помимо асинхронных и синхронных двигателей, в него могут входить статические нагрузки, синхронные конденсаторы и т. д. Под статической нагрузкой понимают нагрузку, создаваемую электроприемниками, в которых отсутствует вращающееся магнитное поле: электрическое освещение, электропечи и другие электротехнологические установки, а также коммунально-бытовые приборы. К статической нагрузке относятся также конденсаторные батареи, емкость ВЛ и КЛ, индуктивные и активные сопротивления элементов сети, которые создают потери .
Исследование устойчивости и переходных процессов в узлах нагрузки весьма важно с двух позиций [1]:
1)поведения собственно нагрузки при переходных процессах и влияние этих процессов на работу потребителей;
2)влияния переходных процессов в нагрузке на режимы системы и устойчивость генераторов.
При расчетах устойчивости СЭС, в зависимости от особенностей решаемой задачи, нагрузки могут быть представлены в схемах замещения различными расчетными моделями. Так, при аналитических расчетах статической или динамической устойчивости статическая нагрузка представляется постоянным сопротивлением, значение которого, в общем случае, зависит от напряжения.
Что касается двигательной нагрузки, то она математически описывается по-разному, в зависимости от числа электродвигателей, входящих в состав узла нагрузки [10]:
в узлах нагрузки с малым числом электродвигателей каждый из них учитывается своими уравнениями и непосредственно вводится в расчет;
в узлах нагрузки, включающих в себя группы различных электродвигателей, относящихся к одному производству, группы заменяются небольшим числом эквивалентных электродвигателей с параметрами, которые рассчитываются по определенным правилам на основании данных о реальных двигателях;
132

крупные узлы нагрузки описываются с использованием ряда конкретных данных о составе нагрузки и параметрах питающей сети, а также исходной информации, полученной в результате статистического анализа.
9.1.Влияние нагрузки на устойчивость системы электроснабжения
Рассматриваемые в предыдущих разделах характеристики и соответствующие им пределы мощности в простейшей электрической системе определялись исходя из предположения, что приемная система является достаточно мощной. Это позволяло считать напряжение на шинах приемной системы неизменным (Uн const ) по абсолютному значению и фазе при всех измене-
ниях режима. Однако такое предположение можно считать справедливым только в том случае, когда мощность питающей системы в 8 10 раз больше мощности приемной системы.
Если приемная система представляет собой местную электростанцию (рис. 9.1), мощность которой соизмерима с мощностью питающей системы, то напряжение на шинах приемной системы зависит от режима работы питающей системы и нагрузки.
Г1 |
|
|
Т1 |
|
Uн |
|
Т2 |
|
|
|
Г2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
P |
jQ |
н |
н |
н |
Рис. 9.1. Принципиальная схема электропередачи с местной электростанцией
При увеличении передаваемой от электростанции Г1 активной мощности напряжение на шинах нагрузки Uн будет снижаться, что вызывает, в свою
очередь, уменьшение предела передаваемой мощности Pm E1Uн  xc . По-
xc . По-
строив семейство характеристик мощности для различных значений напряжения Uн (синусоиды 1, 2, 3, 4), можно получить действительную характери-
стику мощности, переходя при увеличении угла с одной синусоиды на другую в соответствии с уменьшением напряжения (рис. 9.2). Максимум этой
характеристики, так называемый действительный предел мощности Pmд , 133
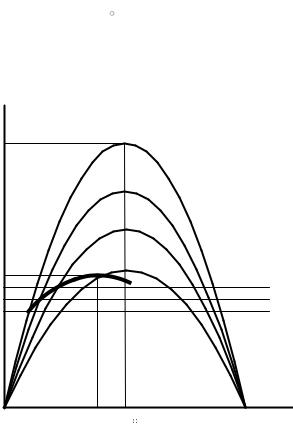
достигается при угле меньше чем 90 . Значение действительного предела мощности меньше идеального придела мощности, который определяется при
Uн const .
P |
|
|
Pm |
|
1 |
|
|
2 |
|
|
3 |
Pд |
|
4 |
m |
|
|
P03 |
|
|
P02 |
|
|
P01 |
|
|
δmд |
90 |
|
Рис. 9.2. К определению действительного предела мощности
Таким образом, снижение напряжения на шинах приемной системы ухудшает статическую устойчивость рассматриваемой системы электроснабжения.
Степень снижения напряжения на шинах приемной системы зависит от свойств нагрузки, подключенной к этим шинам и, в первую очередь, от ее регулирующего эффекта. Под регулирующим эффектом нагрузки понимают явление изменения активной и реактивной мощностей, потребляемых нагрузкой, при изменении напряжения на ее шинах.
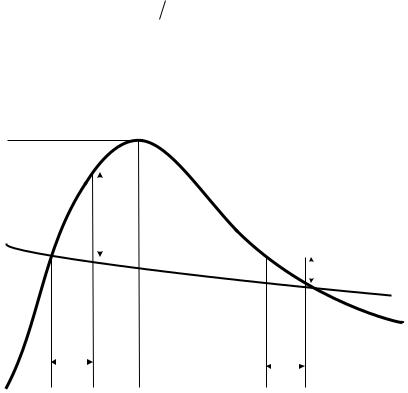
Рассмотрим более подробно, что происходит в рассматриваемой схеме электропередачи (рис. 9.1) при изменении передаваемой мощности в приемную систему. Очевидно, что увеличение мощности, передаваемой от электростанции Г1, приводит к снижению напряжения на шинах нагрузки Uн . Однако
в то же время уменьшение напряжения сопровождается уменьшением мощности, потребляемой нагрузкой (см. рис. 9.3). Это, в свою очередь, вызывает уменьшение потоков мощности в сети, питающей нагрузку, что уменьшает падение напряжения в элементах электропередачи и тем самым в некоторой степени поддерживает напряжение нагрузки.
134

P,Q |
QH |
|
|
|
PH |
|
U |
Рис. 9.3. Статические характеристики нагрузки по напряжению
Регулирующий эффект нагрузки оценивается производными dP dU и dQ
dU и dQ dU в рабочей точке статических характеристик. Регулирующий эффект
dU в рабочей точке статических характеристик. Регулирующий эффект
оказывает значительное влияние на действительный предел мощности и с ним приходится считаться в практических расчетах устойчивости.
9.2. Статическая устойчивость нагрузки
9.2.1. Статическая устойчивость асинхронных двигателей
Основную часть нагрузки составляют асинхронные двигатели, свойства которых существенно проявляются в характере переходных процессов всего узла нагрузки [1]. Анализ статической устойчивости асинхронных двигателей можно осуществлять на основе статических характеристик. Для построения статической характеристики асинхронного электродвигателя обычно используют упрощенную Г-образную схему замещения (рис. 9.4.), в которой не учитываются потери активной мощности в стале, а также активные потери в статоре.
|
xS |
U x |
r |
s |
Рис. 9.4. Схема замещения асинхронного двигателя
135
Активная мощность, потребляемая двигателем, определяется как произведение вращающего момента на угловую скорость вращения магнитного потока двигателя. Данная скорость при неизменной частоте питающей сети остается постоянной при любом скольжении двигателя, и поэтому вращающий момент двигателя пропорционален его активной мощности. В относительных единицах вращающий момент двигателя принимается равным потребляемой им активной мощности [6].
Зависимость активной мощности от скольжения определяется выражением:
|
2 r |
U 2 |
|
r |
|
U 2r s |
(9.1) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
P I |
|
s xS2 |
r s 2 s xS2s2 |
r2 . |
||||||||
|
|
|||||||||||
Эта зависимость дает известную характеристику мощности или вращающего момента двигателя, показанную на рис. 9.5.
P,М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а' |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
P0 |
а |
|
b |
1 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
2 |
Pмех |
|||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
b' |
|
|
|
||||
|
|
S1 |
|
|
|
|
|
S2 |
|
|
|
||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s0 s1 sкр |
s02 s2 |
|
|
s |
||||||||||
Рис. 9.5. Статическая характеристика мощности и вращающего момента асинхронного двигателя: 1 Pмех const ; 2 Pмех s
Предположим, что механическая мощность Pмех не зависит от скольже-
ния. В этом случае ее характеристика будет параллельна оси абсцисс (прямая 1, рис. 9.5). Установившийся режим работы двигателя возможен в двух точках пересечения характеристик электромагнитной (ускоряющей) и механической (тормозящей) мощностей двигателя: в точках а и b. Однако в дей-
136
ствительности устойчивый установившийся режим работы асинхронного двигателя, как и для генератора, возможен только в одной из точек.
Статической устойчивостью двигателя называется его способность самостоятельно восстанавливать исходный режим работы при малых возмущениях.
Предположим, что исходному режиму соответствует точка а. Если в результате какого-либо малого возмущения скольжение увеличивается до значения s1 (точка a' ), то это вызывает увеличение мощности двигателя на вели-
чину P1. В результате на валу возникает избыточный момент ускоряюще-
го характера, так как ускоряющий электромагнитный момент преобладает над тормозящим механическим моментом. Под влиянием этого момента скорость двигателя начинает возрастать, а скольжение уменьшаться. В результате этого устанавливается исходный режим работы двигателя в точке а.
Совершенно иной получается картина при работе двигателя в точке b. Здесь, при увеличении скольжения до s2 (точка b' ), изменение мощности дви-
гателя на величину P2 вызывает появление избыточного момента тормо-
зящего характера, под влиянием которого скольжение еще сильнее возрастает, вплоть до остановки двигателя. Таким образом, режим работы в точке b статически неустойчив и практически неосуществим.
Статическая устойчивость асинхронного двигателя будет осуществляться только в тех случаях, когда рабочие точки располагаются на восходящей части характеристики двигателя, для которой справедливо соотношение
dP |
(9.2) |
|
|
0 . |
|
ds |
|
|
Таким образом, критерием статической устойчивости асинхронного двигателя является положительный знак избыточного момента dP при увеличении скольжения s .
Следует отметить, что в общем случае, когда Pмех статической устойчивости асинхронного двигателя имеет вид:
|
dP |
|
dPмех |
|
(9.3) |
|
ds |
ds |
0 . |
||
|
|
||||
Однако в большинстве случаев определение реальных механических ха- |
|||||
рактеристик затруднено, поэтому принимают Pмех P0 |
const , следователь- |
||||
но, dPмех  ds 0 и критерий устойчивости записывается в виде неравен-
ds 0 и критерий устойчивости записывается в виде неравен-
ства (9.2).
Предельный по сохранению устойчивости режим имеет место при dP ds 0 и характеризуется максимальной мощностью Pm (или, так называ-
ds 0 и характеризуется максимальной мощностью Pm (или, так называ-
137

емым, максимальным опрокидывающим моментом) и критическим скольжением sкр (см. рис. 9.5). Математически эти параметры режима можно найти,
воспользовавшись выражением (9.1), продифференцировав его по скольжению и приравняв производную к нулю:
|
dP |
2 |
|
r2 |
x2 |
s2 |
|
||||
|
|
|
|
|
S |
|
|
(9.4) |
|||
|
ds U r r2 xS2s2 2 0 . |
||||||||||
|
|
||||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sкр |
r |
; |
|
|
(9.5) |
|||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
xS |
|
|
|
||
|
|
|
Pm |
U 2 |
. |
(9.6) |
|||||
|
|
|
|
||||||||
|
|
|
|
|
2xS |
|
|
|
|||
Зная предельные значения скольжения и мощности по условию сохранения статической устойчивости двигателя, можно определить запасы устойчивости по скольжению и мощности (опрокидывающему моменту) путем расчета коэффициентов запаса по этим параметрам:
ks |
sкр s0 |
100 % ; |
(9.7) |
||
|
s0 |
|
|||
|
|
|
|
|
|
kP |
|
Pm P0 |
100 % . |
(9.8) |
|
|
|
||||
|
|
P0 |
|
|
|
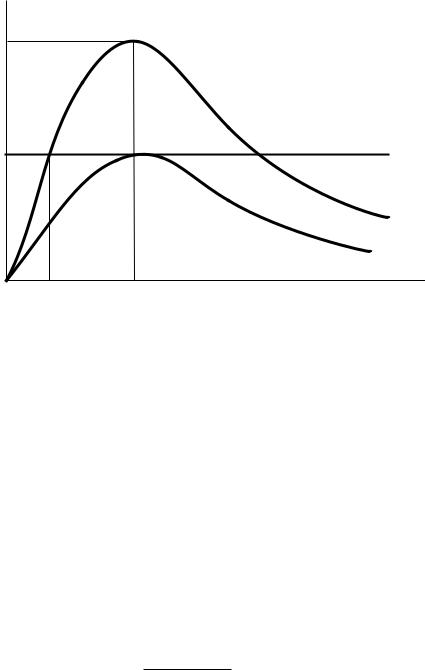
При нормальном напряжении на выводах двигателя значение максимальной мощности или опрокидывающего момента примерно вдвое превышает номинальную мощность двигателя. С уменьшением напряжения на выводах двигателя значение опрокидывающего момента падает по квадратичной зависимости (9.6), и, при снижении напряжения примерно на 30 %, двигатель опрокидывается (рис. 9.6).
Напряжение, при котором электромагнитная мощность, развиваемая двигателем, становится равной механической мощности ( P0 Pm ), называют
критическим, и его значение, согласно (9.6), определяется выражением:
|
|
|
|
Uкр 2P0xs . |
(9.9) |
||
Запас устойчивости двигателя по напряжению в этом случае оценивается коэффициентом запаса, вычисляемым по выражению:
138
k |
U0 |
Uкр |
100 % . |
(9.10) |
|
|
|||
U |
|
U0 |
|
|
|
|
|
|
P,М
Pm
P0
U=Uном
U=0,7Uном
s0 |
sкр |
s |
Рис. 9.6. Характеристики асинхронного двигателя при нормальном и пониженном напряжении
Обычно двигатели, подключенные непосредственно к шинам напряжения, не зависящего от их режима, работают с большим запасом устойчивости. Действие ГОСТ 13109 97 гарантирует поддержание напряжения на шинах нагрузки на уровне, значительно превышающем Uкр . Иная ситуация возника-
ет, когда двигатель подключается к шинам через внешнее сопротивление xвн
(например, при подключении двигателя с помощью кабеля). В этом случае значения критического скольжения и опрокидывающего момента могут быть найдены по формулам:
sкр
Pm
|
|
r |
; |
|
|
||
x |
x |
||
|
S |
вн |
|
U 2
2 xS xвн .
(9.11)
(9.12)
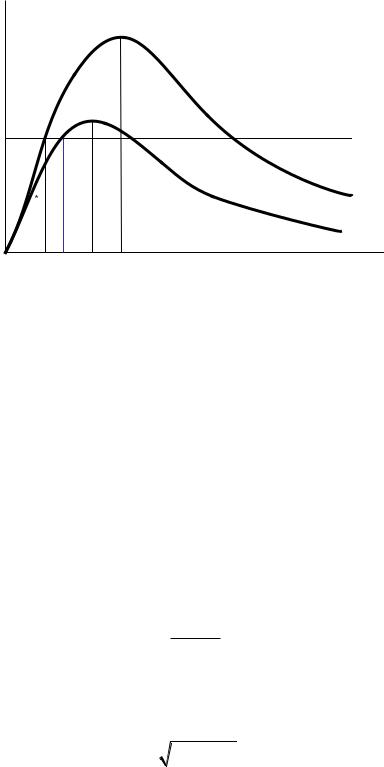
Изменение характеристики мощности при учете внешнего сопротивления показано на рис. 9.7.
139
Р
1
Р0
2
s |
s |
s |
s |
s |
0 |
0 |
кр |
кр |
Рис. 9.7. Влияние внешнего сопротивления на характеристику мощности:
1 – характеристика без учета внешнего сопротивления;
2 – с учетом внешнего сопротивления
Как известно, асинхронный двигатель может устойчиво работать в диапазоне от s0 до sкр . С учетом внешнего сопротивления уменьшается диапа-
зон устойчивой работы и значительно снижается запас устойчивости двигателя. При больших внешних сопротивлениях возможны такие режимы, при которых небольшое понижение напряжения на шинах может привести к нарушению статической устойчивости и опрокидыванию асинхронного двигателя.
Изменение частоты системы также может оказывать влияние на статическую устойчивость асинхронных двигателей. Для качественной оценки этого влияния представим реактивное сопротивление рассеяния двигателя в виде xS 2 fLS . Тогда
sкр 2 rfLS ;
Pm |
|
U 2 |
||
|
|
; |
|
|
|
|
|||
|
4 fLS |
|||
|
|
|
|
|
Uкр |
|
4P0 fLS . |
||
Из полученных формул видно, что критическое скольжение и максимальный опрокидывающий момент двигателя, работающего при пониженной частоте, увеличивается, а критическое напряжение уменьшается. Из этого
140

можно сделать вывод, что снижение частоты положительно влияет на условия работы двигателя.
Однако полученные выводы справедливы лишь для режимов, имеющих запасы по реактивной мощности, так как потребляемая двигателем мощность также зависит от частоты. Как известно, реактивная мощность асинхронного двигателя состоит из мощности рассеяния QS и мощности намагничивания
Q . Влияние изменения частоты на каждую из этих составляющих устанавливаем, записав выражения для их определения в следующем виде:
QS I 2xS |
I 2LS 2 f ; |
(9.13) |
||||
Q |
U 2 |
|
U 2 |
, |
(9.14) |
|
x |
L 2 f |
|||||
|
|
|
|
|||
где LS , L – индуктивности ветвей рассеяния и намагничивания. Анализируя выражения (9.13) и (9.14), получаем, что составляющая QS
уменьшается при снижении частоты, а составляющая Q , напротив, возраста-
ет. Соотношение между этими составляющими в обычных асинхронных двигателях таково, что полная реактивная мощность при небольших отклонениях частоты определяется QS , а при значительном росте частоты − Q . Таким
образом, положительное влияние небольшого снижения частоты на устойчивость двигателя может смениться на отрицательное (при больших снижениях частоты), так как рост потребления реактивной мощности приводит к уменьшению напряжения в питающей сети и, следовательно, к ухудшению условий работы нагрузки.
9.2.2. Статическая устойчивость синхронных двигателей
Для анализа статической устойчивости синхронного двигателя обратимся к его угловой характеристике мощности (рис. 9.8), которая, при отсутствии АРВ и внешнего сопротивления (т. е. сопротивления проводника, с помощью которого двигатель подключается к шинам), описывается выражением:
|
EqU |
|
|
Pэм |
|
sin . |
(9.15) |
|
|||
|
xd |
|
|
Статическая устойчивость синхронного двигателя оценивается так же, как и у синхронного генератора критерием
dP 0 . d
141