

&_ИДО_СТУДЕНТАМ_(Эл. энерг. СиС)_2013г.) / PDF_Уч. пос._Мастерова / глава8(2009)
.pdf8. Динамическая устойчивость СЭС
8.1. Понятие о динамической устойчивости СЭС
То обстоятельство, что система сохраняет статическую устойчивость в установившемся режиме работы, еще не позволяет утверждать, что она окажется устойчивой и при резких внезапных нарушениях режима ее работы, подобных короткому замыканию, отключению генераторов или линий и т. д. Эта сторона проблемы должна быть исследована самостоятельно и затрагивает круг вопросов, относящихся к так называемой динамической устойчивости электрических систем.
Если в исследовании статической устойчивости приходится иметь дело с малыми возмущениями рабочего режима работы системы (перерастающими в выпадение из синхронизма при неустойчивости системы), то предметом исследования динамической устойчивости являются значительные возмущения, причем существенное значение приобретают сам характер и размеры возмущения.
Таким образом, динамическая устойчивость может быть определена как способность системы восстанавливать после большого возмущения исходное состояние или состояние, близкое к исходному.
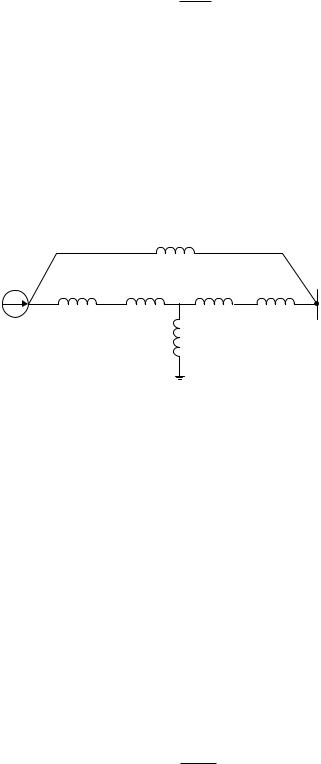
Для выяснения принципиальных положений динамической устойчивости рассмотрим явления, возникающие при внезапном отключении одной из двух параллельных цепей линии электропередачи (рис. 8.1), связывающей удаленную станцию с шинами неизменного напряжения.
Г |
Т1 |
Т2 |
U=const |
|
|||
|
|
|
С |
Рис. 8.1. Принципиальная схема электропередачи при отключении цепи
Схема замещения электропередачи в нормальном режиме (до отключения цепи) представлена на рис. 8.2, а. Индуктивное сопротивление системы,
равное хсI хГ хТ1 0,5хЛ хТ 2 , определяет амплитуду характеристики мощности в этих условиях:
P I EU .
m xcI
При отключении одной из цепей линии электропередачи индуктивное сопротивление системы получает новое значение (рис. 8.2, б):
119
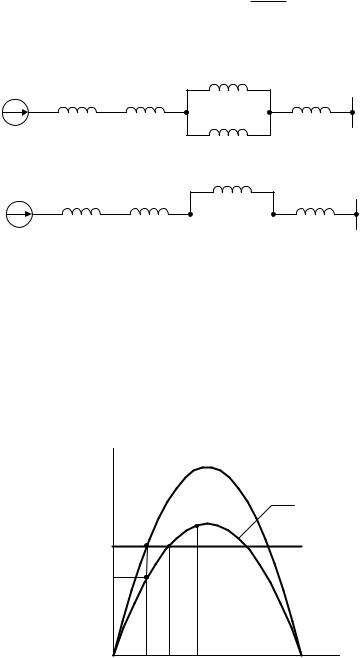
хсII хГ хТ1 хЛ хТ 2 ,
которое больше, чем в нормальном режиме, поскольку индуктивное сопротивление линии при отключении цепи возрастает с 0,5 хЛ до хЛ . Амплитуда
характеристики мощности при отключенной цепи соответственно уменьшается:
|
|
|
P II EU . |
|
|
|
|
|
m |
|
|
|
|
|
x II |
|
|
|
|
|
c |
|
|
E |
xГ |
xТ1 |
xл |
xТ2 |
U |
|
|||||
|
|
||||
|
|
|
xл |
|
|
|
а |
|
|
|
|
E |
xГ |
xТ1 |
xл |
xТ2 |
|
|
U |
||||
|
|
|
|
|
б
Рис. 8.2. Схема замещения электропередачи при нормальном режиме (а) и при отключении цепи (б)
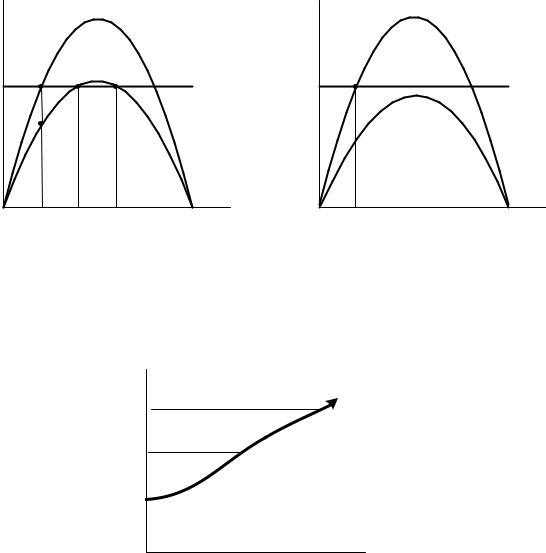
Характеристики мощности в условиях нормального режима ( P I ) и при
отключенной цепи ( P II ) показаны на рис. 8.3. |
|||
P |
|
|
P I |
|
|
|
P II |
|
|
d |
P0 |
a |
c |
|
|
b |
|
|
|
I |
II |
|
|
0 |
0 |
m |
|
Рис. 8.3. Угловые характеристики мощности для случая сохранения динамической устойчивости
120
Если режим работы, предшествовавший отключению цепи, определялся точкой а на характеристике мощности P I нормального режима при пере-
даваемой мощности P |
И угле |
I |
, то после отключения этому режиму |
0 |
|
0 |
|
должна соответствовать новая характеристика мощности P II .
Здесь мы столкнулись с отличительной особенностью последствий больших возмущений: если в результате появления малого возмущения мощность генератора изменяется по одной и той же угловой характеристике, то при больших возмущениях происходит переход с одной угловой характеристики на другую.
В связи с наличием механической инерции у ротора генератора скорость его вращения в первый после отключения момент остается неизменной. Уголсохраняет свое значение, и новый режим будет характеризоваться точкой b
на новой характеристике P II при том же значении угла I . Мощность
0
турбины остается при этом неизменной и равной P0 . Появившийся небаланс мощностей приводит к тому, что ротор генератора начинает изменять ско-
рость. Поскольку P II P0 , то это вызывает ускорение вращения ротора.
Связанный с ротором генератора вектор ЭДС Е начинает вращаться быстрее, чем вращающийся с неизменной синхронной угловой скоростью 0 вектор
напряжения шин приемной системы U . Возникновение относительной скорости вращения приводит к увеличению угла , и на характеристике мощности генератора при отключенной цепи рабочая точка перемещается из точки b по направлению к точке с.
В точке с мощности турбины и генератора вновь уравновешивают друг друга и избыточный момент равен нулю. Однако процесс не останавливается в этой точке, так как относительная скорость вращения ротора достигает здесь наибольшего значения, ротор проходит точку с по инерции и угол продолжает возрастать. При дальнейшем росте угла мощность генератора уже превышает мощность турбины и на валу ротора возникает избыточный тормозящий момент. Относительная скорость вращения теперь уменьшается и в некоторой точке d становится равной нулю.
Это означает, что в точке d вектор ЭДС Е вращается с той же скоростью, что и вектор напряжения U , угол между ними больше не возрастает. Угол в этой точке достигает своего максимального значения m .
Однако возникший переходный процесс не заканчивается, так как вследствие неравенства мощностей турбины и генератора на валу машины продолжает существовать избыточный тормозящий момент, под влиянием которого относительная скорость становится отрицательной. Угол начинает умень-
121

шаться, и процесс по характеристике мощности P II будет протекать в обрат-
ном направлении к точке с. Эту точку ротор вновь проходит по инерции, и около точки b угол достигает своего нового минимального значения, после чего вновь начинает возрастать. После ряда постепенно затухающих колебаний в точке с устанавливается новый режим с прежним значением пере-
даваемой мощности Р |
и новым значением угла II |
. Картина колебаний уг- |
0 |
0 |
|
ла во времени показана на рис. 8.4.
|
0II |
0I |
t |
Рис. 8.4. Колебания угла при отключении одной параллельной цепи электропередачи
Постепенное уменьшение амплитуды обусловливается потерями энергии при колебаниях частоты вращения генератора.
Такой характер перехода к новому режиму не влечет за собой каких-либо осложнений при эксплуатации системы и электроснабжении потребителей, т. е. рассмотренная система при данном возмущении считается динамически устойчивой. Можно отметить лишь, что в переходном электромеханическом
процессе угол |
достигал значений ( |
m |
), превышающих значение II |
но- |
|
|
0 |
|
вого установившегося режима.
Однако может иметь место и другой исход процесса.
Предположим, что амплитуда электромагнитной характеристики мощности после отключения линии меньше, чем амплитуда мощности P II на
рис. 8.3 в рассмотренном ранее случае.
На рис. 8.5, а ротор генератора из-за небольшого тормозящего момента не успевает до точки е уменьшить скорость до синхронной и по инерции проходит ее. В дальнейшем избыточный момент на валу машины становится вновь ускоряющим, угловая скорость начинает быстро возрастать и генератор выпадает из синхронизма (см. рис. 8.6).
122
P |
|
|
|
a |
c |
e |
P0 |
|
b |
|
|
0I |
0II |
кр |
|
|
a) |
|
|
P |
|
a |
P0 |
0I |
|
|
б) |
Рис. 8.5. Угловые характеристики мощности для случая нарушение динамической устойчивости
кр
0II
0I
t
Рис. 8.6. Нарастание угла при нарушении устойчивости
В другом случае (рис. 8.5, б) после отключения цепи на ротор генератора действует постоянно только избыточный ускоряющий момент, что так же приводит к увеличению угла более 180°. Это означает, что генератор не сохранил синхронную работу и рассматриваемая система при данном возмущении является динамически неустойчивой.
123
8.2.Оценка динамической устойчивости системы методом площадей
Как уже отмечалось ранее, картина изменения угла во времени, полученная при решении уравнения движения ротора генератора, позволяет определить, будет ли система динамически устойчива после большого возмущения и последующего перехода от одного режима к другому.
Однако даже в простейшем случае решение уравнения движения ротора генератора, представляющее собой дифференциальное уравнение второго порядка, представляется весьма затруднительным. Это вынуждает искать более простые методы оценки динамической устойчивости системы. Так, достаточно простым и наглядным является метод, основанный на энергетическом подходе к анализу динамической устойчивости, который называется графическим методом или методом площадей.
Сущность данного метода состоит в анализе совершаемой телом работы при его движении под действием какой-либо силы.
Для рассмотрения основных положений метода площадей вновь обратимся к простейшей схеме электропередачи (рис. 8.1), в которой генератор работает через трансформатор и двухцепную линию на ШБМ.
Рассматривая лишь относительное движение ротора и работу, совершаемую в этом относительном движении, можно принять, что при перемещении ротора на бесконечно малый угол d избыточный момент совершает элементарную работу, равную Pd .
|
При отключении одной из цепей линии электропередачи происходит |
|||
изменение характеристик |
электромагнитных мощностей |
с P I на |
P II |
|
(см. рис. 8.7), что приводит к появлению небаланса мощности: |
|
|||
|
|
P P P II sin . |
|
|
|
|
0 m |
|
|
|
Под действием этого небаланса происходит ускорение ротора генератора, |
|||
и его перемещение характеризуется изменением угла с |
I до некоторого |
|||
|
|
|
0 |
|
II |
(см. рис. 8.7). |
|
|
|
0 |
|
|
|
|
|
При этом работу, совершаемую ротором, можно записать: |
|
||
|
0II |
0II |
|
|
|
Ауск Рd |
P0 PmII sin d fabca , |
|
(8.1) |
|
0I |
0I |
|
|
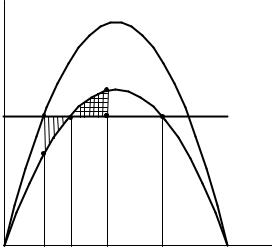
где fabca – заштрихованная площадь abca на рис. 8.7, соответствующая графическому изображению выполненной работы Ауск .
124
P |
|
|
|
|
|
|
d |
|
P0 |
a |
c |
|
k |
|
|
|
e |
|
|
|
b |
|
|
|
0I |
0II |
max |
кр |
|
Рис. 8.7. Анализ устойчивости методом площадей |
||||
При отсутствии потерь вся эта работа идет на изменение кинетической энергии ротора (в его относительном движении). Поэтому величина площади fabca отражает приращение кинетической энергии ротора генератора при его
ускорении и перемещении от угла 0I до угла 0II . Эту площадку принято называть площадкой ускорения.
При угле 0II в точке с электрическая и механическая мощности генератора оказываются одинаковыми. Однако наличие кинетической энергии Ауск , запасенной ротором во время ускорения, приводит к тому, что ротор
проходит точку с и продолжает движение. После того как ротор пройдет точку своего установившегося положения на новой характеристике мощности, избыточный момент меняет свой знак и начинает тормозить вращение ротора. При этом кинетическая энергия, запасенная при ускорении, переходит в потенциальную. При угле max вся кинетическая энергия израсходуется. Работу,
выполненную ротором в период торможения, можно записать:
|
max |
|
max |
PmII sin P0 d fcdec . |
|
Аторм |
|
Рd |
|
(8.2) |
|
|
0II |
|
0II |
|
|
Площадка fcdec может быть названа площадкой торможения.
125
Когда работа торможения Aторм уравновесит работу ускорения Ауск ,
относительная скорость становится равной нулю. В этот момент ротор останавливается в своем относительном движении и достигнутый им при этом угол max является максимальным углом отклонения ротора машины.
Для определения угла max оказывается достаточным равенство Ауск Аторм или, что то же самое:
fabca fcdec .
Максимально возможная площадь торможения определяется углом кр ,
после прохождения которого избыточный момент вновь становится ускоряющим, и возвращение в исходное состояние (или состояние близкое к исходному) уже не возможно. На рис. 8.7 максимально возможная площадь торможения равна площадке fcdekc , называемой площадкой возможного
торможения.
Таким образом, для сохранения динамической устойчивости необходимо, чтобы площадка возможного торможения была больше или, по крайней мере, равна площадке ускорения. Это возможно при выполнении условияmax кр . Если же площадка возможного торможения будет меньше, чем
площадка ускорения, то ротор не сумеет затормозиться и угол будет неограниченно возрастать. Это приведет к выпадению генератора из синхронизма и нарушению динамической устойчивости.
Поэтому условие сохранения динамической устойчивости может быть сформулировано в виде
fуск fв.торм . |
(8.3) |
Следовательно, для сохранения динамической устойчивости необходимо, чтобы площадка возможного торможения была больше или, по крайней мере, равна площадке ускорения.
Для оценки запаса динамической устойчивости простейшей системы может быть определен коэффициент запаса:
kз |
fв.торм fуск |
. |
(8.4) |
|
fуск |
||||
|
|
|
126
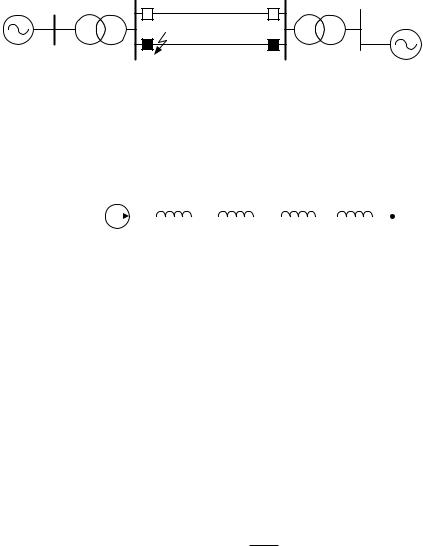
8.3. Динамическая устойчивость при КЗ на линии. Предельный угол отключения КЗ
Основной причиной нарушений динамической устойчивости электрических систем являются обычно короткие замыкания, резко уменьшающие амплитуду характеристики мощности.
Рассмотрим общий случай несимметричного КЗ на линии для простейшей схемы электропередачи (рис. 8.8).
Г |
Т1 |
Т2 |
U=const |
|
|||
|
|
K n |
|
|
|
|
С |
Рис. 8.8. Схема электропередачи
E |
|
xГ |
|
xТ1 |
|
0,5xл xТ2 |
|
U |
||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.9. Схема замещения электропередачи для нормального режима
На рис. 8.9. приведена упрощенная схема замещения рассматриваемой электропередачи при нормальном режиме, представляющая собой последовательное соединение индуктивных сопротивлений отдельных элементов системы, дающее в сумме хс :
xcI xГ xТ1 0,5xл xТ 2 ,
где |
x |
Г |
x . |
|
|
d |
Было установлено, что при быстром изменении угла в нормальном или аварийном режиме характеристику мощности генератора можно считать синусоидальной
P EU sin , xc
где Е = Е' − переходная ЭДС генератора, приложенная в его схеме замещения за переходным индуктивным сопротивлением.
127
Таким образом, в нормальном режиме амплитуда характеристики мощности
P I EU .
m xcI
Теперь предположим, что в начале одной из цепей линии электропередачи (см. рис. 8.8.) произошло несимметричное КЗ. Схема замещения системы для этого режима принимает вид, изображенный на рис. 8.10, где в месте КЗ
включено эквивалентное шунтирующее сопротивление х n , состоящее из
сопротивлений обратной и нулевой последовательностей, определенное по тем же правилам, что и для расчета токов несимметричного КЗ (см. гл. 3).
xc II
E |
xГ |
xТ1 |
0,5xЛ xТ2 U |
х n
Рис. 8.10. Схема замещения электропередачи при коротком замыкании и ее преобразование
Величина и место включения эквивалентного шунтирующего сопротивления влияют на значение собственных и взаимных сопротивлений системы, определяющих, в свою очередь, характеристику электромагнитной мощности. Для рассматриваемой схемы (рис. 8.8) взаимное сопротивление в аварийном режиме можно найти, воспользовавшись формулами преобразования звезды в треугольник:
II |
xГ xТ1 0,5xл xТ 2 |
xГ xТ1 0,5xл xТ 2 |
|
. |
(8.5) |
xc |
х n |
|
|||
|
|
|
|
|
|
Характеристика мощности системы в аварийном режиме рассчитывается с учетом изменившегося сопротивления. Она так же имеет синусоидальный характер, но амплитуда ее меньше, чем при нормальном режиме:
P II EU .
m xcII
128