

PH_1_Lecture_3_2013
.pdfФИЗИКА - 1 Весенний семестр 2012/2013 |
Лекция № 3 |
|
|
1. Кинематика МТ: Æ Ускорение Æ Скорость Æ Путь
ЛК-2: Известен закон движения rr(t) Æ Определены характеристики
••
движения МТ – скорость и ускорение rr(t).
Обратно: Ускорение Æ Скорость Æ Путь
Известно ускорение 
•
характеристики движения МТ – скорость rr(t), траекторию rr(t) и путь s
Вычисление скорости vr(t)
(известно значение скорости в начальный момент времени t = t1 ):
|
|
|
|
|
|
|
|
|
|
(t1 )+ t |
|
+ t |
|
•r• |
|
dv |
|
r |
|
|
|
|
vr(t)= vr0 |
ar(t)dt = vr0 |
dvr |
||
|
|
|
|
|
|
||||||||
r |
t |
|
|
a |
t |
|
|
|
|||||
|
( )= |
dt |
= |
|
( ) |
|
|
|
|
t1 |
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Траектория |
rr(t) |
|
и вектор перемещения |
rr |
МТ из положения |
|
rr(t ) |
в |
rr(t |
2 |
) |
: |
||||||||||||||||||||||||||||
|
|
|
12 |
|
1 |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r |
|
|
|
|
t r |
|
r |
|
|
|
t |
r |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r (t)= r |
(t1 )+ ∫v |
(t)dt = r (t1 )+ ∫dr |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
|
|
|
|
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
r• |
( )= dr = r( ) |
|
|
|
|
|
|
r |
t r |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
r |
|
t |
|
|
v t |
|
|
|
|
|
|
r12 |
= ∫v(t)dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Вычисление пути за время |
|
|
|
|
|
|
: |
|
|
|
|
t1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
(t2 −t1 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s → s1 + s2 + |
s3.... + sN |
|
= ∑ sk |
|
|
|
|
|||||||||||||||||||||||||||
(t2 −t1 )→ t1 +Δt2 + |
t3.... +ΔtN |
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sk |
vk |
|
tk |
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Среднее значение скорости на |
|
tk |
|
|
|
|
|
|
|
tk |
- промежуток времени |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s → lim |
v t |
|
|
|
|
|
|
|
|
|
|
|
|
||||
При |
N →∞, |
|
tk →0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
tk →0 |
∑ k |
k |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =1 |
|
|
|
до |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
v |
(t) |
|
t1 |
|
|
|
|
|
|||||||||||||||||||||||||||||||
Определенный интеграл от функции |
в пределах от |
t2 |
|
|
|
|||||||||||||||||||||||||||||||||||
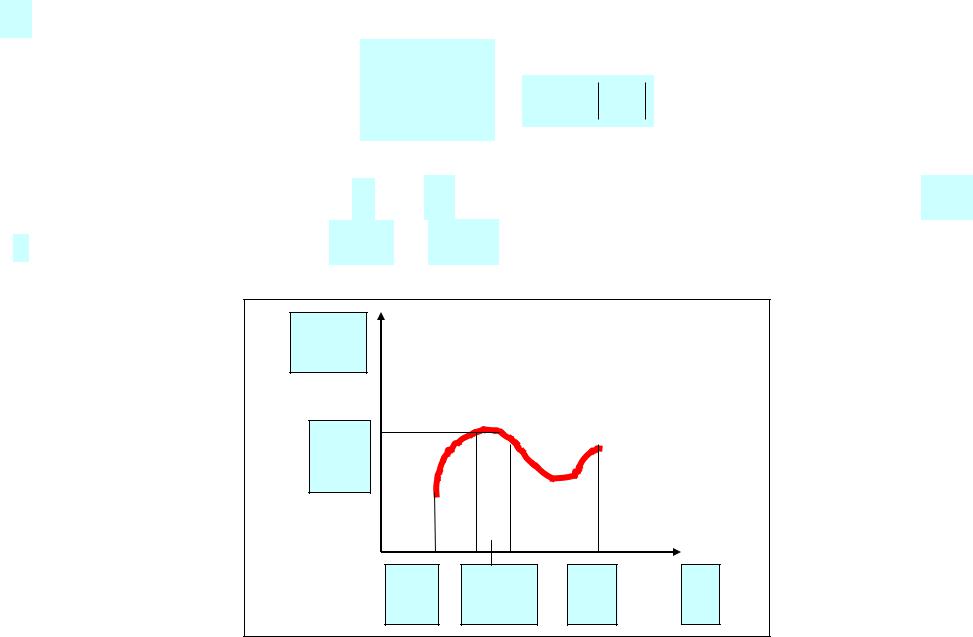
Путь s : |
|
|
|
|
|
|
|
t2 |
|
|
|
|
s = ∫v(t)dt , v(t)= vr(t) |
|
|||
|
|
t1 |
|
|
|
Путь, пройденный за время от t1 до t2 |
- площадь, ограниченная кривой v(t), |
||||
осью t |
и прямыми линиями t =t1 |
и t =t2 . |
|
|
|
|
v(t) |
|
|
|
|
|
vk |
|
|
|
|
|
|
t1 |
tk |
t2 |
t |
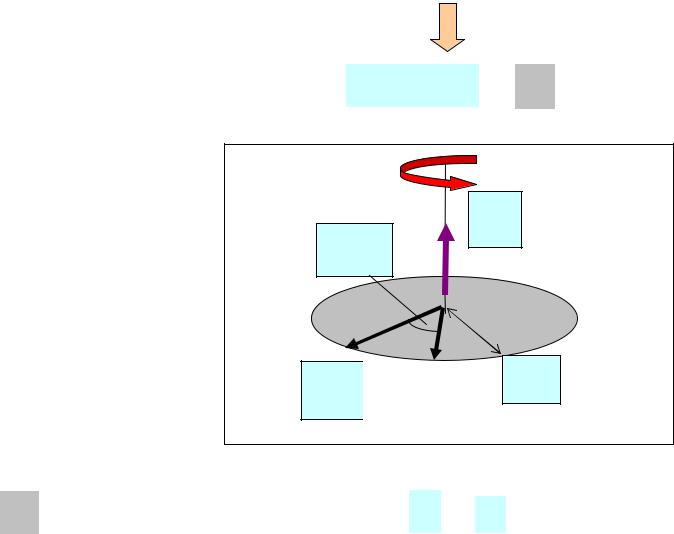
2. Вращательное движение МТ |
|
|
|
|
|
Поворот (вращение) МТ на малый угол |
ϕ → 0 вокруг оси n : |
|
|||
|
s |
|
|
rr |
|
|
|
|
1 |
r2 |
|
|
|
|
|
||
|
r |
|
|
r |
|
|
|
|
|
||
|
|
|
|
r3 |
|
|
ϕ |
|
|
ϕ3 |
n |
|
|
|
|
||
|
n |
|
|
ϕ1 |
|
|
|
|
|
||
|
|
|
|
ϕ2 |
|
Перемещение = |
rr . Путь, который прошла МТ при повороте |
ϕ → 0 - |
|||
почти прямолинеен |
rr R |
|
|
||
|
s |
ϕ |
|
||

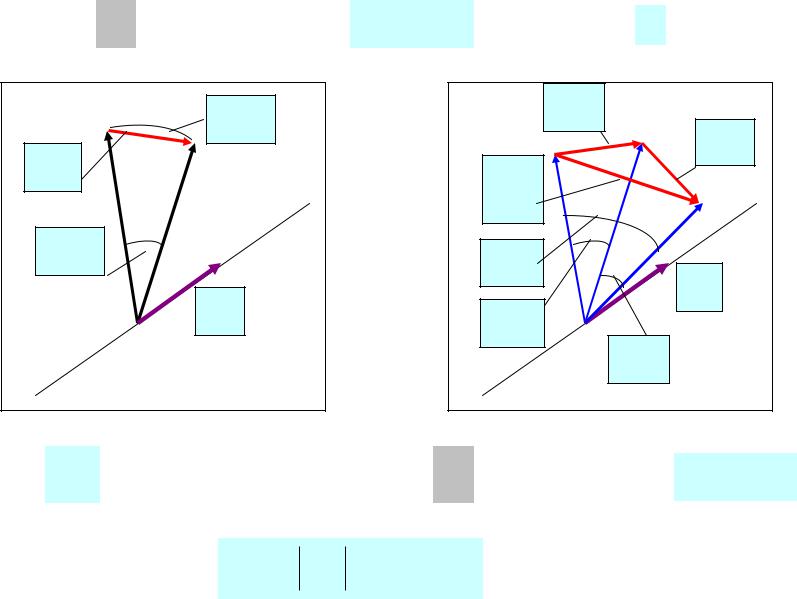
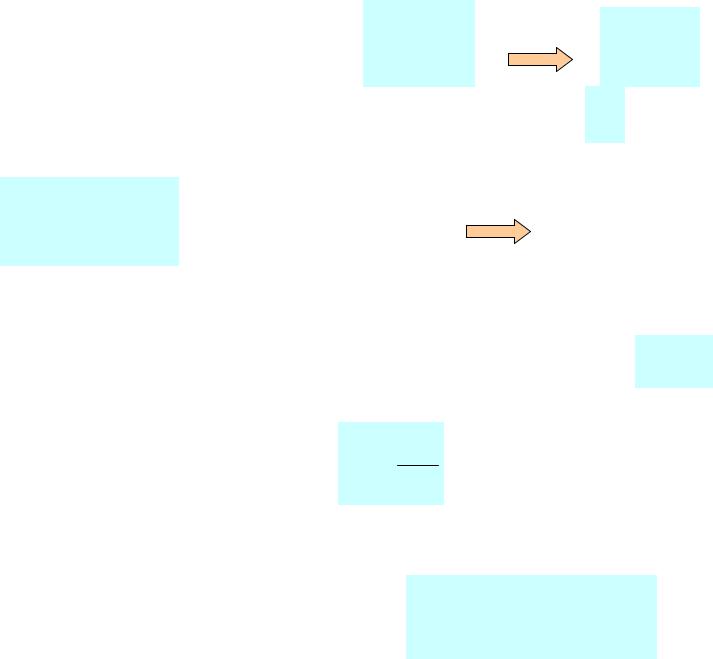
Два последовательных поворота |
ϕ1 |
и |
ϕ2 |
вокруг одной оси вращения: |
|||
ϕ3 = ϕ1 + ϕ2 |
|
|
|
|
|
|
|
, перемещение |
|
r3 = |
r1 + |
r2 |
|||
|
|
|
|
|
|
|
|
Сложению углов поворота – скалярных величин - соответствует сложение перемещений – векторов.
При этом (если тело состоит из большого количества МТ) одному углу поворота соответствует бесконечно много векторов перемещений.
Хотелось бы ввести одну характеристику – вектор. Почему:
Одна степень свободы (вращение) +выделенное направление – ось вращения!
Соглашение: вводим вектор малого угла поворота ϕ Æ модуль ϕr → 0 и направление n – по правилу правого винта (как на рис.)
Если направление вектора связано с направлением вращения - это аксиальный вектор (псевдовектор).
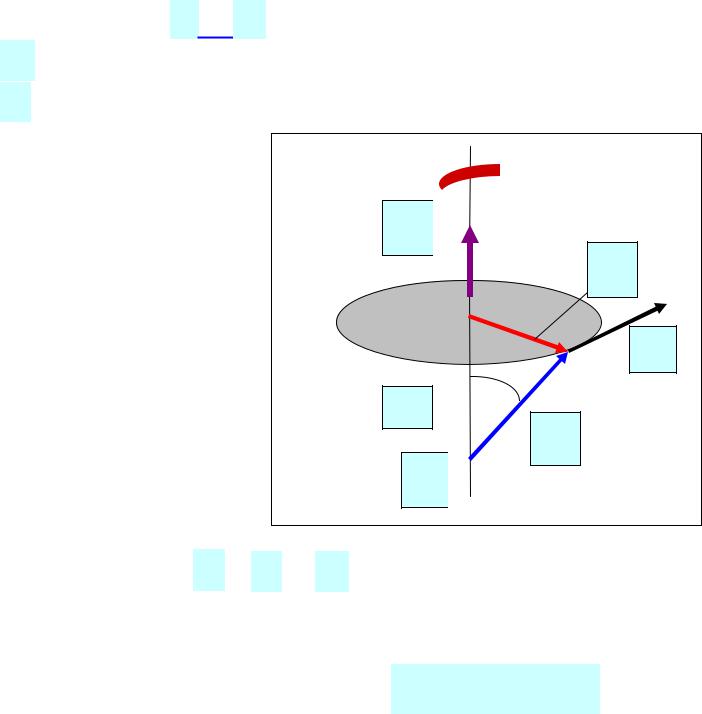
Угловая скорость: |
|
|
|
|
ωr = lim |
ϕ |
= dϕ |
|
t |
||
|
t→0 |
dt |
|

Вектор ω направлен вдоль оси вращения в сторону, определяемую правилом правого винта

 ωr
ωr
Равномерное вращение: |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
|
ω = |
|
r |
|
|
= |
dϕ |
= const |
|
ω = |
= const |
|||
|
|
|
|
|||||||||||
|
|
ω |
|
|
|
|
t |
|||||||
|
dt |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь ϕ - угол поворота (в СИ измеряем в радианах: 360 град = 2π рад) и t - время (в СИ измеряем в секундах), за которое совершается этот поворот
Период обращения: время T , за которое тело совершает полный оборот, т.е.
ϕ = 2π и
ω = |
2π |
T = |
2π |
T |
|
||
ω |
Число оборотов в единицу времени – частота f
1 |
|
ω |
|
|
|||
|
ω = 2πf |
|
|||||
f = |
|
= |
|
(линейная частота) |
(угловая частота) |
||
T |
2π |
||||||
|
|
|
|
|
|||
Единицы измерения частоты: 1 Гц (герц) = 1 оборот/с
Неравномерное вращение: мгновенные значения T , f
Угловое ускорение: вектор ωr = ddtϕ может изменяться - это либо изменение
скорости вращения вокруг фиксированной в пространстве оси, либо поворот оси вращения:
βr = lim |
ω |
= dω |
|
t |
|||
t→0 |
dt |
Угловое ускорение – псевдовектор (аксиальный вектор), как и угловая скорость.
Линейная скорость точек вращающегося тела: пусть точка находится на
расстоянии |
|
от оси вращения. При повороте на угол |
|
ϕ |
точка пройдет путь |
|||||
R |
||||||||||
s R ϕ |
. |
Линейную скорость определяем по величине как |
||||||||
|
|
|
v = lim |
s |
= lim R |
ϕ = R |
dϕ |
|
||
|
|
|
t →0 |
t |
t →0 |
t |
|
dt |
|
|
v =ω R (*)
ωr
ϕ
s R
R
Формула (*) – связь модулей векторов v и ωr.
Связь векторов v и ω:
Or - начало координат (на оси вращения) r - радиус-вектор вращающейся точки
ω 

R
v
α 
r
O 

На рис.: векторы R , vr и ω - взаимно перпендикулярны.
Для определения связи этих векторов пробуем комбинацию – векторное произведение [ω, r ]=ω×rr

Модуль:
[ω, rv] =ω r sinα =ω R - это нас устраивает, т.к. получаем модуль линейной скорости, v =ω R
Направление:
[ω, r ] - совпадает с вектором v - по правилам векторного произведения!
Поэтому связь векторов линейной и угловой скорости – это
v =[ω, r ]=ω×r (**)
Дифференцируем (**) по времени и находим ускорение:
|
|
|
|
|
v |
dωr v |
r r |
r |
r |
|
r r r |
|
|
|
|
|
|||||
|
|
|
|
|
a |
= |
, r |
+[ω,v |
]= β ×r |
+ω×[ω, r ] |
|
(***) |
|
|
|
||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось вращения неподвижна: |
β ||ωr |
, поэтому в |
|
|
|
|
|
|
|||||||||||||
(***): |
|||||||||||||||||||||
|
r |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
- тангенциальное ускорение (направлено по скорости |
v |
) |
||||||||||||||||||
|
β ×r |
||||||||||||||||||||
|
ωr |
×[ωr |
, rr] |
- нормальное ускорение (направлено |
|
) |
|
|
|||||||||||||
|
|
||||||||||||||||||||
|
v |
|
|
||||||||||||||||||