

PH_1_Lecture_2_2013
.pdfФИЗИКА - 1 Весенний семестр 2012/2013 |
Лекция № 2 |
Часть 1. МЕХАНИКА
Механика: раздел физики, изучает движение тел в пространстве и времени
1. Введение. Механическое движение
Простейшая форма движения – механическое движение: изменение во
времени t положения тел или их частей относительно друг друга. Классическая (не квантовая) механика
Нерелятивистская механика |
|
|
Релятивистская механика |
|||||||||||||
Законы Ньютона |
|
Специальная теория |
||||||||||||||
|
M >> ma |
|
|
|
|
|
|
|
|
относительности (СТО) |
||||||
|
|
v << c |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
M >> ma |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v ≤ c |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- скорость света в вакууме, |
M >> ma |
- масса тела |
|||||||||
|
|
|
|
c − |
||||||||||||
|
|
|
|
|
|
|
ma |
|
- масса атома |
|||||||
Пространство и время абсолютны |
, |
|
|
Пространство и время связаны Æ |
||||||||||||
не зависят друг от друга и |
|
|
единое 4-мерное пространство-время |
|||||||||||||
от присутствующих в нем тел |
|
|
|
|
|
|
|
|
||||||||
Как изучать механическое движение?
•Система отсчета: совокупность неподвижных относительно друг друга тел, по отношению к которым рассматривается движение и, конечно, часы
•Механическая система: совокупность тел, выделенных для рассмотрения
•Описание движения тела: знание для каждого момента времени t положение в пространстве и скорости
•Состояние механической системы: положение и скорости всех тел, образующих систему
•Задача механики: состояние механической системы при t =t0 + законы движения Æ состояние системы при t >t0
•Материальная точка (точечная масса, частица): тело, размерами которого
в условиях данной задачи можно пренебречь Примеры: Земля - Солнце Спутник - Земля
МЕХАНИЧЕСКИЕ ТЕЛА
Материальная точка (МТ) |
Абсолютно твердое тело (ТТ) |
Пренебрегаем размерами |
Деформациями в условиях данной |
|
задачи можно пренебречь |
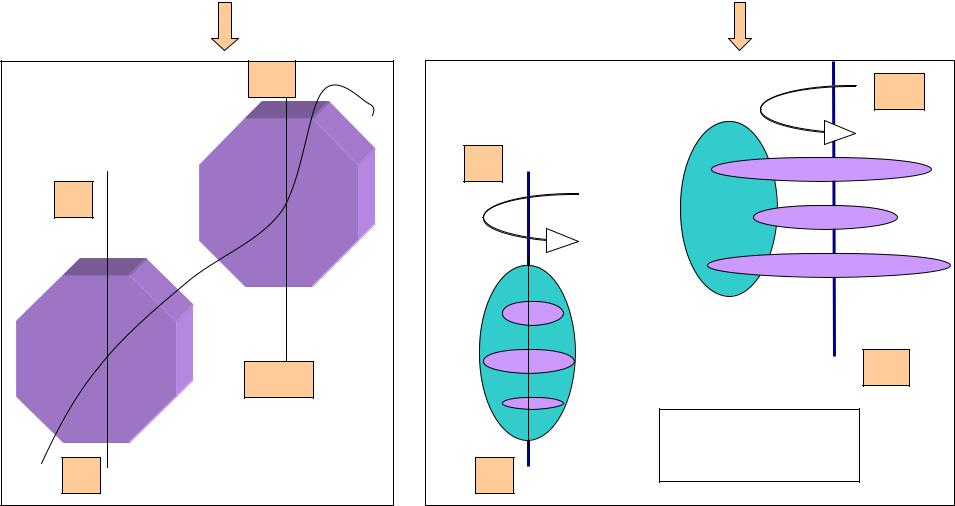
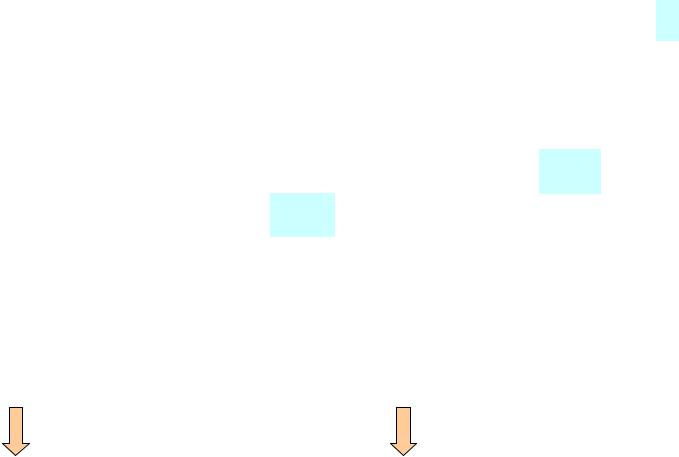
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поступательное движение |
Вращательное движение |
Любая прямая, связанная с |
Все точки тела движутся по |
движущимся телом, остается |
окружностям, центры которых лежат |
параллельной себе |
на одной и той же прямой – на оси |
|
вращения |
|
A’ |
A’ |
|
|
|
|
|
A |
A |
|
|
|
B’ |
B’ |
|
|
|
|
|
2 положения оси |
B |
|
вращения |
|
B |
Количественное описание движения механической системы: тела, образующие систему отсчета + часы = система координат
Декартова система координат: положение МТ определяют 3 координаты x, y, z Æ радиус-вектор r = (x, y, z)= e x +ey y +ez z
Реализация: решетка из линеек (масштабные стержни) + синхронизированные друг с другом часы, размещенные в узлах решетки. Положение МТ и соответствующего момента времени = регистрация по ближайшим к материальной точке масштабам (пространственным координатам) и часам
МЕХАНИКА
Механика материальной |
Механика твердого тела |
Механика сплошной |
точки |
|
среды |
Кинематика: движение тел, вне причин, вызвавших движение
Динамика: движение тел в связи с причинами, которые определили характер движения

Основа механики Ньютона (нерелятивистской механики) - 3 закона динамики
(И. Ньютон, 1687). Законы Ньютона – результат обобщения |
||||||||||||||||
экспериментальных данных. Пределы применимости: |
||||||||||||||||
|
|
|
|
|
|
|
|
, |
M >> ma |
|
|
|
||||
|
|
|
|
|
v << c |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- масса атома |
|
|
|
|
|
- скорость света |
|
|
|
|
|
|
|
ma |
||||
|
|
|
c |
|
|
|
||||||||||
Дальнейшее развитие: |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||
Релятивистская механика |
Квантовая механика (микромир – |
|||||||||||||||
(СТО) |
|
атомы, молекулы, ядра …) |
||||||||||||||
При |
|
переходит в обычную |
Корпускулярно-волновой дуализм. При |
|||||||||||||
v <<c |
||||||||||||||||
(нерелятивистскую) механику |
|
|
|
|
переходит в обычную |
|||||||||||
|
M >> ma |
|||||||||||||||
|
|
|
|
|
|
|
механику |
|
|
|||||||
|
|
|||||||||||||||
Общая теория относительности |
Релятивистская квантовая теория |
|||||||||||||||
(ОТО) |
|
M ≈ ma |
, |
|
|
|||||||||||
|
v ≈c |
|||||||||||||||
Гравитация |
|
(ядерная |
|
физика, физика |
||||||||||||
|
|
|
|
|
|
элементарных частиц) |
||||||||||
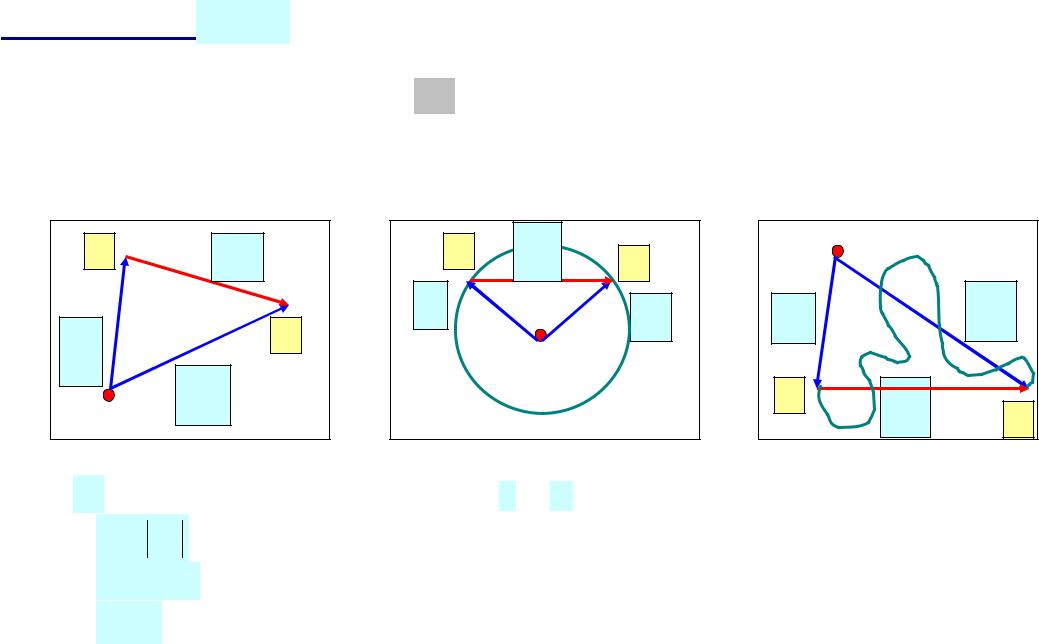
2. Кинематика материальной точки (частицы)
Траектория r =r(t)
Траектория – линия, которую МТ описывает при своем движении.
|
Движение: |
|
Прямолинейное |
По окружности |
Криволинейное |
1 |
r12 |
1 |
r12 |
2 |
|
|
|
|
|
|
rr2 |
||||
rr1 |
|
r1 |
|
r2 |
r |
|
|
rr2 |
2 |
|
r1 |
|
|
||
|
|
|
|
1 |
r12 |
2 |
|
|
|
|
|
|
|
Путь s : расстояние между точками 1 и 2 , отсчитанное вдоль траектории. s = rr12 - прямолинейное движение
s = 2πR - полный оборот по окружности s =?… - произвольное движение
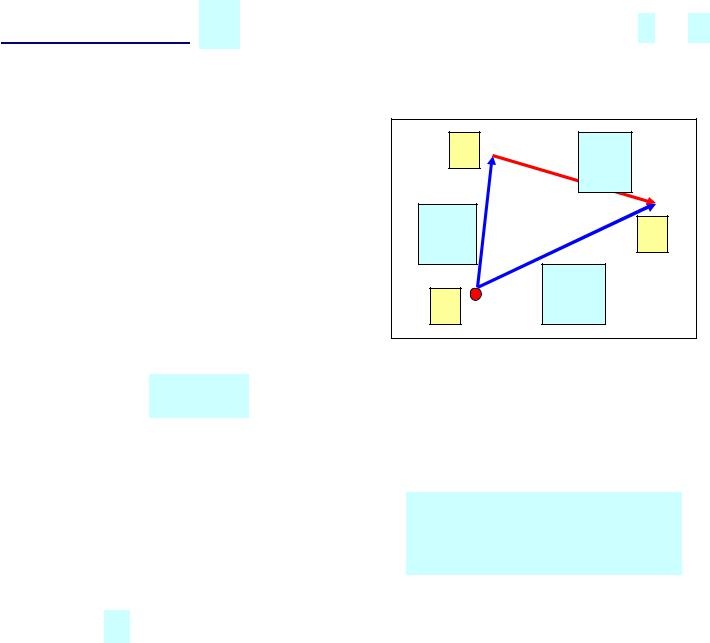
Перемещение r12 : прямолинейный отрезок из 1 в 2 , вектор – характеризуем числовым значением и направлением. Перемещения складываем по правилам сложения векторов (ЛК-1)
2 |
r |
|
r23 |
rr |
3 |
12 |
rr13 |
1 |
Скорость v =v(t) (velocity)
векторная величина, характеризует быстроту перемещения частицы по
траектории и направление, в котором движется частица в момент времени |
|
: |
||||
t |
||||||
|
vr = lim |
r |
= drr |
|
|
|
|
= rr& |
|
||||
|
t→0 |
t |
dt |
|
|
|
Вектор v направлен по касательной к траектории:
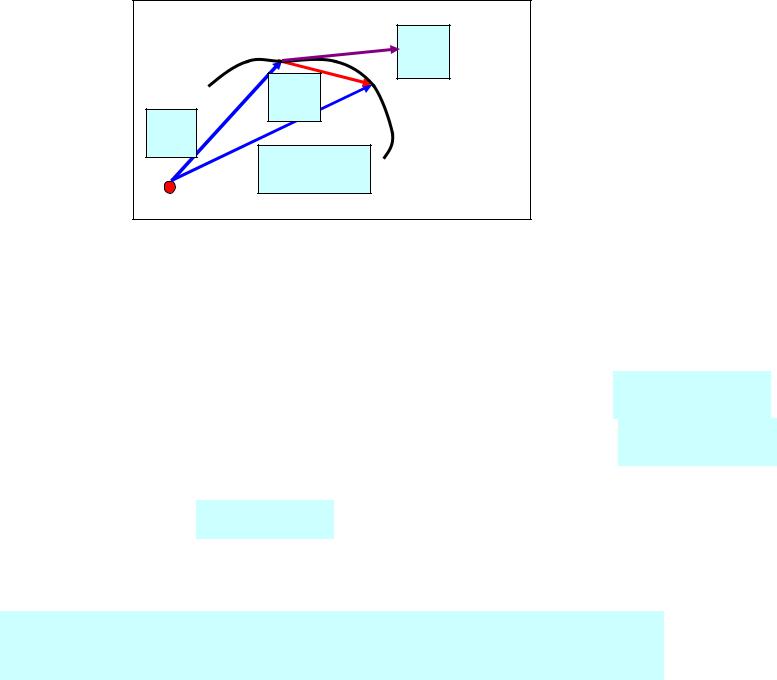
r |
vr |
|
|
r |
|
r + |
r |
Модуль скорости |
|
: |
v = |
|
vr |
|
= lim |
s |
= |
ds |
|
- производная пути по времени. |
|||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||
v |
|||||||||||||||||||||||||||||
t |
dt |
||||||||||||||||||||||||||||
|
|
|
|
t→0 |
|
||||||||||||||||||||||||
Примеры: |
|
|
|
|
|
|
|
|
|
|
|
|
r( ) |
|
= |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
• Равномерное движение по окружности |
v(t) |
≠ |
const |
, но |
|
|
const |
|
|
||||||||||||||||||||
|
|
|
v t |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r( ) |
|
= |
|
|
|
|||
• Равномерное прямолинейное движение |
v(t) |
= |
const |
и |
|
|
const |
|
|||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
v t |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Элементарное перемещение: dr =v dt
Проекции вектора скорости (декартова система координат):
vr = rr& = erx x• +ery y• +erz z• = erx vx +ery vy +erz vz

|
|
|
• |
|
|
|
|
|
• |
|
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
vx = x |
|
vy = y |
|
|
|
|
vz = z |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Скалярное произведение: |
r r r2 |
= v |
2 |
|
|
2 |
|
|
2 |
2 |
|
• 2 |
|
• 2 |
|
• 2 |
|||||||
v v |
= v |
|
|
= vx |
+vy |
+vz |
= x |
+ y |
+ z |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v = |
|
• 2 |
|
• 2 |
|
|
• 2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
x |
|
+ y |
+ z |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Два представления вектора v :
1. vr = v erv = v τr, τr - орт касательной к траектории, направлен в сторону vr
vr =τ v
r
r + r

2.Представим радиус-вектор в виде r = r err и продифференцируем по времени:
|
|
dr |
|
d |
|
|
|
|
|
• |
• |
|
|
|
|
|
vr = |
= |
(r er |
)= r er |
+r er |
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||
|
|
dt |
dt |
r |
r |
r |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||||
Быстрота изменения модуля |
r = |
|
rr |
|
|
|
Быстрота изменения |
|
по |
||||||
|
|
|
|
|
|||||||||||
|
|
|
|
r |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
Направлению |
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
Фактически – это разложение вектора скорости на 2 компоненты:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vrr = r err |
|
|
|
|
|
|
|
|
vrϕ = r err |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
r• |
|
dϕ |
r |
• |
|
r • |
r |
|
||
Производная единичного вектора (ЛК-1): |
|
er = |
|
|
|
eϕ =ϕ eϕ =ϕ e |
, поэтому |
||||||||||||
|
|
|
dt |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
r |
r |
|
r |
r |
• |
r |
r |
• |
|
r |
|
|
|
||||
|
|
v |
=vr |
+vϕ |
vr |
= r er |
vϕ = r ϕ eϕ |
|
|
|
|||||||||