

механика
.pdfрис. 17, г) и пары сил с алгебраическим моментом МA (рис. 17, б)
или МВ (рис. 17, в, г).
а |
б |
в |
г |
|
YA |
YВ |
MB |
|
А |
|
|
|
А |
В |
|
|
|
XB В |
|
|
МA |
MB |
Рис. 17
Скользящая заделка схематически изображается так, как показано на рис. 18.
Рис. 18
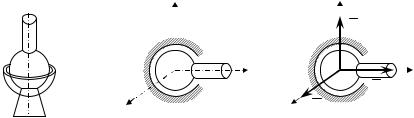
1.1.9. Бискользящая заделка
Бискользящая заделка представляет собой такую связь, которая препятствует телам взаимно поворачиваться, при этом сохраняется возможность любого движения в плоскости этой заделки, и, следовательно, эта связь осуществляет две степени свободы тела. Пример такой связи – крестовина (рис. 19, а). Реакция бискользящей заделки сводится к паре сил с алгебраическим моментом МA (рис. 19, б, г).
Схематически бискользящая заделка изображается так, как показано на рис. 19, в.
21

а |
б |
в |
г |
А |
А |
А |
А |
|
МА |
|
МA |
|
|
|
Рис. 19
1.1.7. Шероховатая поверхность
Шероховатость поверхности специально оговаривается в условии задачи.
Реакция такой связи заранее не известна по направлению,
поэтому её раскладывают на две составляющие: нормальную N
и касательную (силу трения скольжения Fтр ) (рис. 20), т. е.
R N Fтр . Модули N и Fтр определяются из соответствую-
щих условий равновесия. Сила трения скольжения направляется в сторону, противоположную возможному перемещению тела по поверхности.
N
Fтр
Рис. 20
Величина силы трения определяется по формуле
0 F |
Fmax , где |
Fmax f N . |
тр |
тр |
тр |
22
Величина f (коэффициента трения) либо задается в задаче, либо является искомой величиной.
1.2.СВЯЗИ, ИСПОЛЬЗУЕМЫЕ
ВПРОСТРАНСТВЕННЫХ КОНСТРУКЦИЯХ ЗАДАЧ СТАТИКИ
1.2.1. Сферический (шаровой) шарнир. Подпятник
Сферический шарнир позволяет соединяемым телам совершать пространственные взаимные вращения вокруг центра шарнира. Реакция такого шарнира проходит через его центр и может иметь любое направление в пространстве. При решении задач реакцию сферического шарнира представляют в виде трёх составляющих, направленных вдоль координатных осей декартовой системы координат (рис. 21).
При этом типе связи тело обладает тремя степенями свободы – возможностью вращения вокруг трёх осей x, y, z, при запрете перемещения центра шарнира.
|
z |
z |
|
|
|
|
|
|
|
ZA |
|
А |
y |
А |
y |
YA |
|||
x |
x |
XA |
|
|
Рис. 21 |
|
|
23
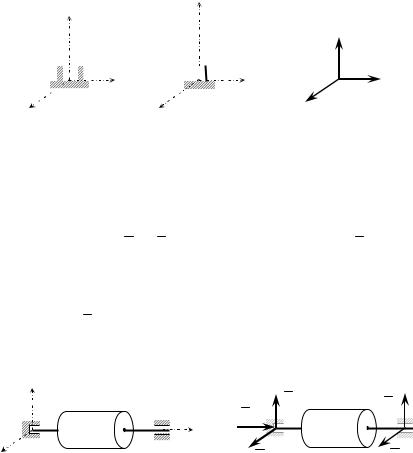
Подпятник (рис. 22, а, б) представляет собой соединение цилиндрического шарнира с опорной плоскостью. Такая связь позволяет вращаться валу (цилиндру) вокруг его оси и перемещаться вдоль неё, но только в одном направлении.
а |
|
|
z |
б |
|
z |
|
в |
|
|
|
B |
|||||||||||
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
||||
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
В |
|
|
|
В Y |
|
|||||||||||||||
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
B |
|||||||
x |
|
x |
|
XB |
|||||||||||||||||||
Рис. 22
Реакция подпятника (рис. 22, в) складывается из реакции цилиндрического подшипника, лежащей в плоскости, перпендикулярной к его оси (в общем случае она может быть разложена на составляющие XB , YB ) и нормальной реакции ZB опорной плоскости.
Аналогичным способом направляются и реакции упорного подшипника А (рис. 23); однако следует иметь в виду, что составляющая YA , действующая вдоль оси упорного подшипника, может быть направлена только к телу.
z |
|
|
ZA |
ZB |
|
|
|
||
|
|
|
YA |
|
А |
В |
y |
А |
В |
|
XB |
|||
x |
|
|
XA |
|
|
|
|
Рис. 23 |
|
24
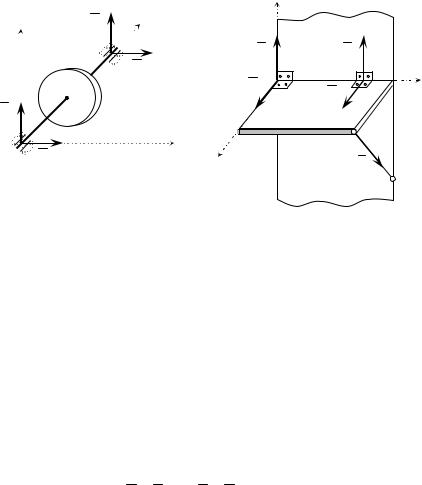
1.2.2. Подшипник, петля (цилиндрический шарнир)
а |
|
б |
z |
|
|
ZB |
|
|
|
|
|
y |
|
|
|
|
|
z |
|
|
|
|
|
В |
XB |
|
ZA |
ZB |
|
|
|
A |
|
B |
|
|
|
|
XA |
XB |
y |
ZA |
|
|
|
||
|
|
|
|
|
|
А XA |
x |
x |
|
C |
|
|
SC |
|
|||
|
|
|
|
|
Рис. 24
На рис. 24, а в точках А и В представлен тип связи, называемый подшипником. Очень часто его используют с целью максимального уменьшения сил трения между звеньями механизма, например, подшипники устанавливают на концах вращающегося вала.
На рис. 24, б в точках А и В изображён тип связи, который называется цилиндрическим шарниром, или, в обиходе, петлёй. Его применяют в тех случаях, когда два соседних звена должны вращаться относительно друг друга вокруг общей оси вращения.
Эти пространственные типы связей аналогичны плоскому цилиндрическому шарниру и, следовательно, все выводы, полученные для цилиндрического шарнира, справедливы и для подшипника, и для петли. Т. е., реакции в точках А и В состоят из
двух составляющих XA ,ZA и XB ,ZB . Вдоль оси y составляющей силы реакции не возникает, подшипник (петля) не препятствует движению тела в этом направлении.
25
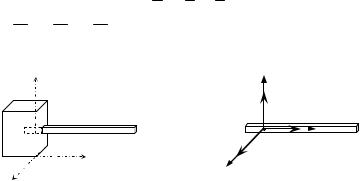
1.2.3. Жёсткая заделка
Если же на рассматриваемое тело действует пространственная система сил, то реакцию жёсткой заделки представляют в
виде трёх составляющих XA , YA , ZA и трёх компонентов мо-
мента МAx , МAy , МAz .
z |
|
|
|
|
|
|
Az |
|
|
|
|
|
|||
|
|
|
|
М |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
A |
|
||||
|
А |
|
|
|
|
Z |
А |
||||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
YA |
|
Ay |
||
|
y |
|
|
|
A |
М |
|||||||||
|
|
М |
Ax |
|
|
|
|
|
|||||||
x
Рис. 25
Подводя итог анализу различных видов связей приведём таблицу (см. приложение), в которой для различных видов связей (или точнее, способов соединения тел между собой) показаны соответствующие реакции.
2. ПОРЯДОК (ПЛАН) РЕШЕНИЯ ЗАДАЧ
Приступая к решению задачи, необходимо разобраться в условии задачи и рисунке, а затем:
1)составить расчётную схему;
2)определить вид полученной системы сил и выбрать соответствующие ей уравнения равновесия;
3)выяснить, является ли задача статически определимой (т. е. не превышает ли число неизвестных числа уравнений);
26
4)составить уравнения равновесия и определить из них искомые реакции связей;
5)сделать проверку полученных результатов.
Остановимся поподробнее на составлении расчётной схемы.
2.1. Расчётная схема
Расчётная схема – это чертёж, который включает:
–объект равновесия (точку, тело или систему тел);
–активные (заданные) силы, пары сил; распределённые нагрузки следует заменить эквивалентными им по действию сосредоточенными силами;
–силы реакции, заменяющие действия отброшенныхсвязей;
–все необходимые размеры.
Этот чертеж и схема могут либо помогать решать задачу, либо, при небрежном отношении к чертежу, просто провоцировать на ошибки.
Чтобы Ваши чертежи помогали решать задачи, необходимо знать следующее:
а) никогда не следует экономить время на оформлении чертежа (расчетной схемы) к решаемой задаче. Чем яснее чертеж, тем Вы быстрее решите задачу и с меньшей вероятностью ошибки;
б) чертеж к задаче должен быть достаточно крупным, чтобы легко читались все заданные размеры, хорошо были видны углы, образуемые векторами сил или линиями чертежа с осями координат;
в) тело, равновесие которого рассматривают, должно быть хорошо видно, для чего оно рисуется более толстыми линиями; все векторы сил, стрелки моментов пар сил должны четко выделяться на фоне чертежа. «Плохо» выделенный вектор легко пропустить при составлении уравнений равновесия. Это влечет за собой и неверное решение задачи, и потерю времени на поиск ошибки;
27

г) важно, чтобы зрительная пропорциональность размеров на чертеже соответствовала заданной в условии задачи.
Еще более важно, чтобы углы, которые образуют силы или линии чертежа с теми или иными осями координат, соот-
ветствовали заданным.
Углы в 30º, 45º, 60º и 90º желательно научиться рисовать достаточно точно от руки.
Замечания
1.При выполнении расчётной схемы изображение тела без связей не является строго обязательным; иногда воздействие реакций связей на тело показывают на исходном чертеже конструкции, подразумевая, что это тело «свободное».
2.При замене связей (опор) силами реакций помнить:
–если связь препятствует перемещению тела только в одном каком-нибудь направлении, то направление её реакции противоположно этому направлению;
–если же связь препятствует перемещению тела по многим направлениям, то силу реакции такой связи изображают её
составляющими X , Y , показывая их параллельно выбранным осям координат x и y (направление составляющих реакций связей на чертеже следует изображать независимо от направлений и величин действующих активных сил). Числовые значения реакций будут определяться последующим расчётом; если алгебраическое значение реакции получено со знаком минус, то значит соответствующая реакция имеет направление, противоположное первоначально принятому.
3. Решение уравнений равновесия будет тем проще, чем меньшее число неизвестных будет входить в каждое из них. Поэтому при составлении уравнений равновесия следует:
– координатные оси x и y располагать так, чтобы одна из осей была перпендикулярна к линии действия хотя бы одной из неизвестных сил, в этом случае эта неизвестная сила исключается из соответствующего уравнения равновесия;
28

– за центр моментов выбирать точку, в которой пересекаются линии действия наибольшего числа неизвестных реакций связей, тогда моменты этих сил не войдут в уравнение моментов.
4. Если сила F в плоскости xy имеет две составляющие её силы Fx и Fy , то при вычислении момента силы F вокруг не-
которой точки О полезно применить теорему Вариньона, вычислив сумму моментов составляющих её сил относительно этой точки.
5. Если к телу в числе других сил приложена пара сил, то её действие учитывается только в уравнении моментов сил, куда вносится момент этой пары с соответствующим знаком.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Бабанов, В.В. Теоретическая механика для архитекторов. В 2 т. Т. 1: учебник / В.В. Бабанов. – М.: Академия, 2008. – 256 с.
Богомаз, И.В. Теоретическая механика: учебное пособие для вузов в 2 т. Т. 1 / И.В. Богомаз. – М.: Изд-во АСВ, 2005. – 191 с.
Бутенин, Н.В. Курс теоретической механики. В двух томах / Н.В. Бутенин, Я.Л. Лунц, Д.Р. Меркин. – СПб.: Лань, 2009.
– 736 с.
Никитин, Н.Н. Курс теоретической механики: учебник / Н.Н. Никитин. – СПб.: Лань, 2010. – 720 с.
Тарг, С.М. Краткий курс теоретической механики: учебник / С.М. Тарг. – М.: Высшая школа, 2006. – 416 с.
Яблонский, А.А. Курс теоретической механики: учебник / А.А. Яблонский, В.М. Никифорова. – СПб.: Лань, 2008. – 768 с.
29
ПРИЛОЖЕНИЕ
ТИПЫ СВЯЗЕЙ
Название связей
Реакции связей
и их обозначение на схемах
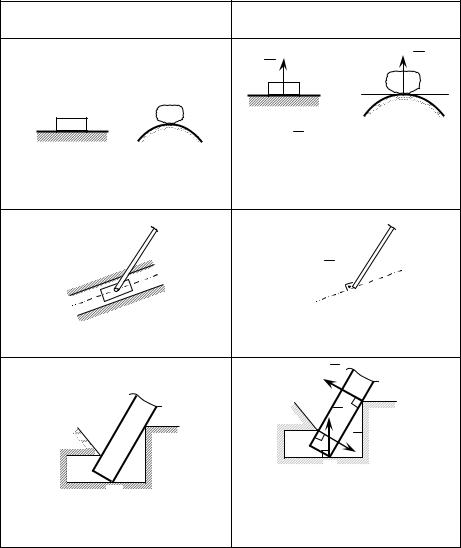
Гладкая поверхность |
N |
N |
|
|
Реакция N направлена к телу. Реакция гладкой поверхности направлена по общей нормали к поверхностям соприкасающихся тел
Ползун с шарниром
NA
А
А
Реакция направлена перпендикулярно направляющим
Опорное ребро |
RC |
|
С
С |
А RB |
А |
RA |
|
В |
ВРеакция такой связи направлена по нормали к той поверхности, которая не имеет ребра
30