

механика
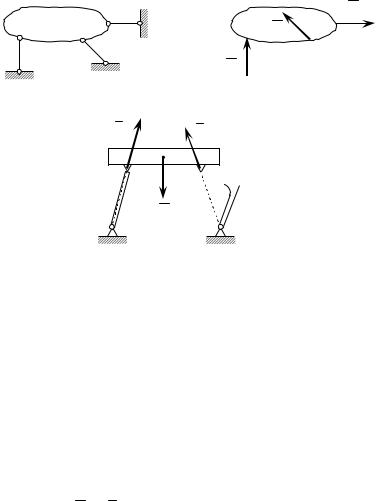
.pdfРассуждая аналогично, реакции бруса (рис. 3, б, г) будут направлены так, как изображено на рис. 3, в, г.
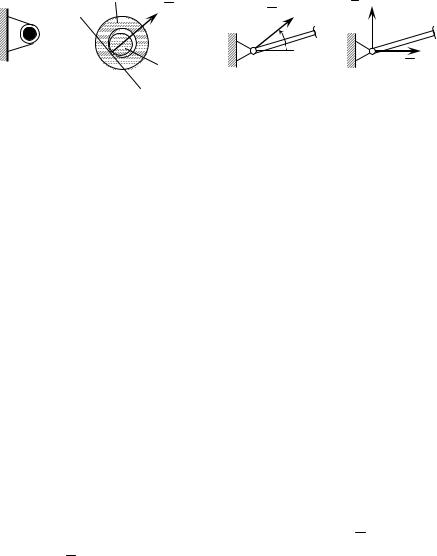
1.1.2.Ползун с шарниром
Вэтом типе связи (рис. 4) из трёх степеней свободы остаются две, третья же в связи с запретом движения по нормали к направляющим отсутствует, т. е. в этом случае присутствует
только одна реакция NA , направленная перпендикулярно направляющим.
NA
А
А
Рис. 4
1.1.3. Неподвижный цилиндрический шарнир или подшипник
Цилиндрическим шарниром (рис. 5, а) называется соединение двух тел посредством пальца (болта), проходящего через отверстия в этих телах. Диаметр отверстия во втулке (рис. 5, б) несколько больше диаметра пальца. Тело, жёстко скреплённое с втулкой, может только вращаться вокруг оси шарнира (оси пальца), перпендикулярной к плоскости рисунка, не имея возможности перемещаться по этой плоскости, т. е. в этом виде связи остаётся только одна степень свободы – вращение.
11
а |
б втулка |
в |
|
г |
|
|
R |
RА |
YA |
А |
|
|
φ |
|
палец |
А |
А |
XA |
Рис. 5
Во многих случаях можно пренебречь трением в шарнире (между поверхностями пальца и втулки). В таком шарнире (называемом «идеальным») нет препятствий ни для поворота втулки вокруг оси пальца, ни для её перемещения вдоль этой оси. Идеальный шарнир препятствует лишь перемещению втулки в направлении нормали к поверхности втулки и пальца, и, следовательно, его реакция может быть направленной только по этой нормали (по радиусу пальца). Но так как втулка в зависимости от её расположения и приложенных к ней сил может прижиматься к любой точке пальца, то указать заранее направление реакции цилиндрического шарнира нельзя. Единственное, что можно утверждать (если пренебречь трением в шарнире), это то, что реакция неподвижного цилиндрического шарнира лежит в плоскости, перпендикулярной к его оси, и имеет радиальное направление.
Для определения реакции связи в тех случаях, когда её направление оказывается неопределённым, полезно заменить искомую реакцию несколькими составляющими, представляющими собой векторные проекции этой реакции на оси выбранной декартовой системы координат, неизвестными теперь только по величине. Например, реакции шарнира А (рис. 5, а) или упора А
(рис. 6, а) удобно разложить на горизонтальную XA и верти-
кальную YA составляющие, если оси декартовой системы координат направлены стандартно (рис. 5, г, рис. 6, б). В дисциплине
12
«Сопротивление материалов» горизонтальную составляющую
обозначают HA , а вертикальную – VA .
а |
б |
|
YA |
|
XA |
А |
А |
Рис. 6
В обоих случаях можно считать, что связь А (шарнир или упор) препятствует перемещению тела как в горизонтальном, так и в вертикальном направлениях.
y |
|
|
|
В общем же случае, формально |
|||
|
|
|
считая, что реально существующая |
||||
|
|
|
|
|
|
x |
реакция шарнира имеет проекции на |
YA |
|
|
|
оси выбранной для данной задачи де- |
|||
|
|
|
|
|
A |
картовой системы координат, соответ- |
|
|
|
А |
X |
||||
|
|
|
|
|
|
|
ствующие векторные составляющие |
|
|
|
|
|
|
|
|
|
|
Рис. 7 |
|
|
|
реакции направляют вдоль этих осей |
|
|
|
|
|
|
|
||
(рис. 7).
После того как будут найдены модули каждой из составляющих реакций, можно найти (при необходимости) и полную
реакцию RA связи как равнодействующую её векторных состав-
ляющих. Для этого надо скалярные проекции XA ,YA сделать
векторными XA XAi , YA YA j , и тогда реакция RA будет на-
правлена по диагонали параллелограмма со сторонами XA ,YA , отложенными в выбранном масштабе.
Заметим, что, раскладывая реакцию на составляющие, можно не заботиться о правильности выбора направлений по намеченным линиям их действия. В случае, если в действитель-
13
ности та или иная составляющая окажется направленной в сторону, противоположную предложенной, мы будем получать для неё в ответе отрицательное значение.
Шарнирно-неподвижная опора схематически изображается двумя стержнями (рис. 8, а и б), соединёнными между собой на одном конце общим шарниром А, ось которого, очевидно, будет неподвижной. Реакция такой опоры проходит через ось шарнира, но не известна ни по модулю, ни по направлению и, следовательно, характеризуется двумя неизвестными элементами.
а |
б |
|
в |
|
|||||||||
|
А |
|
А |
|
А |
|
|||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8
Определение модуля и направления реакции шарнирнонеподвижной опоры можно, как было сказано выше, заменить определением модулей двух составляющих этой реакции. Наличие в схеме шарнирно-неподвижной опоры двух стержней указывает на то, что неизвестны две составляющие реакции данной связи.
Шарнирно-неподвижная опора для балки или стержня изображается так, как показано на рис. 8, в.
Кроме неподвижного опорного цилиндрического шарнира в составных конструкциях встречаются соединительные шарниры (рис. 9, а), скрепляющие два соседних звена (внутренняя связь).
а |
б |
|
YC XC XC С |
||
С |
||
|
С |
|
|
YC |
|
|
Рис. 9 |
14

Для того чтобы определить реакции в таком шарнире, необходимо расчленить конструкцию по этому шарниру. Тогда, с учётом аксиомы сил действия и противодействия, реакции в каждой части расчленённой конструкции в шарнире С при стандартном расположении осей декартовой системы координат бу-
дут иметь вид (рис. 9, б), при этом XC XC и YC YC .
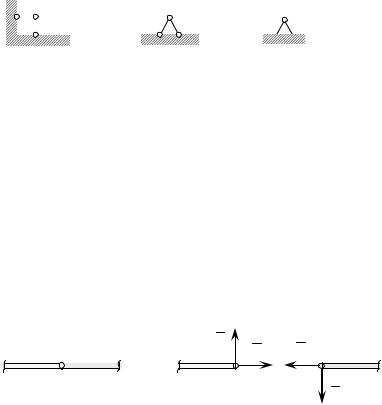
1.1.4. Подвижный цилиндрический шарнир (или опора на катках)
Подвижная шарнирная опора представляет собой сочетание цилиндрического шарнира и гладкой поверхности, вдоль которой опора может перемещаться на катках. Это обстоятель-
ство и обусловливает направление реакции R .
Мы говорили до сих пор о связях, осуществляемых абсолютно гладкими поверхностями. Эти связи препятствуют перемещению тел только в направлении, нормальном к поверхности, и характеризуются одной нормальной реакцией. Негладкая поверхность не только препятствует перемещению, нарушающему связь, но и затрудняет перемещение по самой поверхности. Следовательно, реакция негладкой поверхности имеет две составляющие: одну – нормальную к поверхности, и другую – лежащую в плоскости скольжения (в общей касательной плоскости к поверхности тела и опорной поверхности) и направленную в сторону, противоположную той, в которую двигают или пытаются сдвинуть тело. Первая составляющая является нормальной реакцией, вторая носит название силы трения. Следовательно, негладкие опорные поверхности отличаются тем, что для них приходится дополнительно учитывать силу трения.
О том, как это делается, мы будем говорить дальше, в п. 1.1.7. Сейчас отметим только, что хотя идеально гладких поверхностей, а следовательно, и идеальных связей в действительности не существует, но на практике во многих случаях силой
15
трения можно пренебречь и практически считать связи идеальными.
Подвижность катка настолько велика, и, следовательно, сила трения настолько мала, что можно считать такую связь препятствующей лишь перемещению, перпендикулярному к опор-
ной плоскости, почему она и характеризуется всегда одной
нормальной реакцией R (рис. 10; 11, а).
R
Рис. 10
Таким образом, такой тип связи допускает движение тела параллельно опорной плоскости и возможность вращения вокруг оси шарнира, перпендикулярной плоскости, в которой лежит механизм, т. е. из трёх возможных степеней свободы одна отнимается, та, которая соответствует движению по нормали к опорной плоскости.
а |
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
в |
|
|
||||||
R |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 11
Такая опора представляет собой так называемую шарнир- но-подвижную опору и часто схематически изображается одним стержнем, перпендикулярным поверхности с шарнирами на кон-
16

цах (рис. 11, б). Реакция подобной опоры проходит через ось шарнира и направлена по нормали к опорной поверхности. Наличие в схеме опоры одного стержня указывает на то, что неизвестен лишь один элемент реакции шарнирно-подвижной опоры – её модуль.
Шарнирно-подвижная опора для стержня может изображаться так, как показано на рис. 11, в.
1.1.5. Гибкая связь (нить, трос, цепь)
Пусть груз весом G подвешен в точке А на нитях так, как показано на рис. 12, а.
а |
б |
|
С |
В |
|
А |
ТС |
ТВ |
|
А |
|
|
|
G |
G
Рис. 12
Если считать нити нерастяжимыми, то они не дают точке А удаляться от точки С по направлению нити СА и от точки В по
направлению ВА. Следовательно, реакции ТС и ТВ нерастяжи-
мых гибких нитей всегда направлены вдоль нитей к точке их подвеса (реакцию гибкой связи часто обозначают буквой Т).
Другими словами, направление реакции в гибкой связи известно заранее и точно – она всегда направлена по нити от точки тела, к которому она прикреплена, вдоль нити так, как показано на рис. 13, в сторону, противоположную движению точки (тела), если связь рассечь.
17

|
ТА |
|
ТВ |
|
В |
|
T |
А |
А |
В |
|
|
|
||
|
|
|
G |
|
|
|
Рис. 13 |
1.1.6. Невесомый шарнирный стержень
Нити на рис. 13 могут быть без изменения направлений реакций заменены твёрдыми стержнями, если пренебречь их весом
исчитать стержни соединёнными посредством идеальных шарниров. Учитывая, что шарниры идеальные, стержни абсолютно твёрдые, невесомые (как правило, их весом можно пренебречь)
ивсе силы приложены к шарнирам, стержни будут подвержены только или сжимающим, или растягивающим усилиям. Эти силы могут только растягивать или сжимать стержни. В самом деле, как мы знаем, идеальный шарнир характеризуется только одной, нормальной к оси шарнира реакцией. Но две силы, приложенные к стержню в его концах, могут уравновешиваться только тогда, когда они равны по модулю и направлены по одной прямой в противоположные стороны. Следовательно, реак-
ция невесомого и шарнирно закреплённого стержня направлена вдоль линии, соединяющей центры шарниров.
Подобным же образом, очевидно, направлены и реакции шарнирно закреплённых стержней, подпирающих тело (рис. 14). Алгебраическое значение силы, действующей вдоль стержня и растягивающей или сжимающей его, называется усилием в стержне; при растяжении усилие обычно считается положительным, его направляют от узла, а при сжатии – отрицательным (направлено в узел). Реакции стержней часто обозначают буквами S или N.
18
|
С |
|
NC |
А |
В |
А NB |
С |
|
|
NA |
В |
|
|
|
SB SC
 В С
В С
|
G |
А |
D |
|
Рис. 14 |
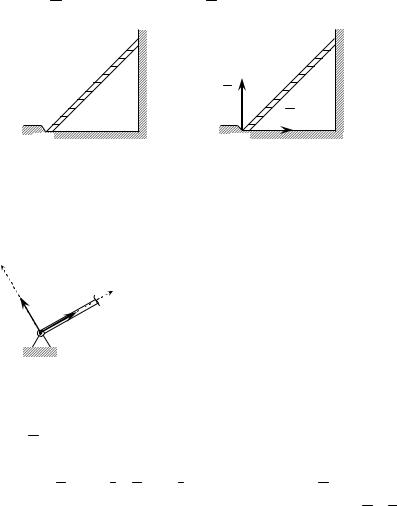
1.1.7. Жёсткая заделка (защемление)
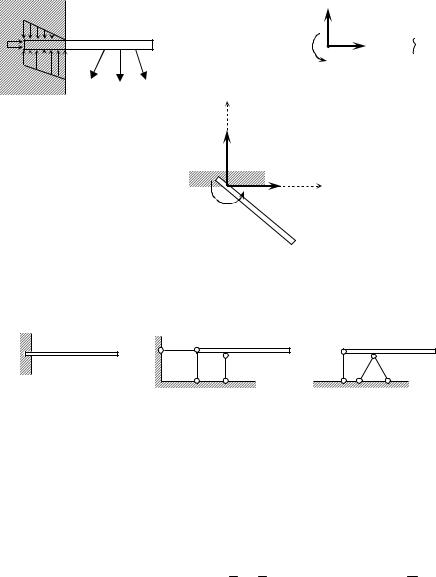
Жёсткая заделка (рис. 15, а) представляет собой такое внедрение данного тела в другое, при котором нет взаимных перемещений этих тел (например, гвоздь вбит в стену, балконная плита заделана в стену, столб врыт в землю). Реакция заделки представляет собой силы, распределённые по поверхности контакта тел. Если на рассматриваемое тело действует плоская система сил, то реакцию жёсткой заделки представляют в виде двух
составляющих XA , YA и пары сил с алгебраическим моментом
MA (рис. 15, б, в).
Число степеней свободы для данного тела в случае жёсткой заделки равно нулю.
19
а |
|
|
|
|
|
б |
|
А |
|
YA |
|
||||
|
|
|
А |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МA |
XA |
|
|
|
|
|
|
Fn |
|
|
|
|
|
|||||
F |
|
|
|
|
|
|
|
|
||||||||
|
F |
|
|
|
|
|
||||||||||
1 |
|
|
|
|
y |
|
|
|
|
|
||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
YA |
|
|
|
|
|
|||
|
|
|
|
|
|
в |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
X |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x
МA
Рис.15
Жёсткая заделка часто схематически изображается так, как показано на рис. 16.
Рис. 16
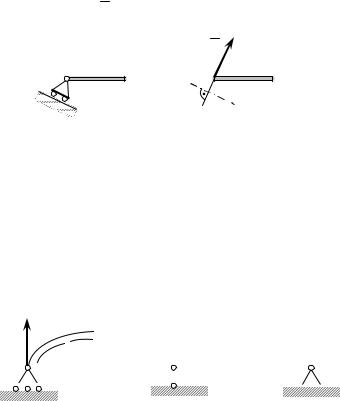
1.1.8. Скользящая заделка
Скользящая заделка является частным случаем жёсткой, но в отличие от последней появляется одна степень свободы, позволяющая перемещаться данному телу вдоль направляющих (рис. 17, а). Реакция скользящей заделки состоит из силы, пер-
пендикулярной направляющим (YA , YB – рис. 17, б, в и XB –
20