

5.3 Графоаналитическое определение аналогов скоростей
__ __ __
ОА = ОВ + ВА
__ __ __ __ __
ОВ + ВС + СD = OE + ED
VA = VB + VAB
VB + VCB = VD + VCD
Коэффициент пропорциональности аналогов скоростей:
Kv=![]() =0.008H/c·мм
=0.008H/c·мм
Вычисление аналогов скоростей для q=120гр.
Ω2=![]() =-0.565
=-0.565
VB=![]() =-0.452
=-0.452
Ω4=![]() =-0.278
=-0.278
VD=![]() =-0.43
=-0.43
5.4 Графоаналитическое определение аналогов ускорений
Векторные уравнения для ускорений:
WA= WB + TAB + NAB
WB + TCB - NCB = WC + TCD - NCD
Коэффициент пропорциональности аналогов ускорений:
KW=![]() =0.016H/c2·мм
=0.016H/c2·мм
Вычисление аналогов ускорений для q=120гр.
E2=![]() =-3.748
=-3.748
WB=![]() =0.214
=0.214
E4=![]() =-2.137
=-2.137
WD=![]() =0.208
=0.208
(Соответствующие планы аналогов скоростей и ускорений содержатся в приложении)
Таблица сравнения результатов, полученных разными методами
(для q=120°)
|
|
Аналитический метод
|
Графоаналитический метод
|
Машинный расчет |
|
Xd |
-0.49 |
-0.49 |
-0.47945 |
|
Xd` |
-0.107 |
-0.10685 |
-0.10705 |
|
Xd`` |
0.013 |
0.01302 |
0.01336 |
|
Xb |
-0.404 |
-0.404 |
-0.40176 |
|
Xb` |
-0.113 |
-0.11402 |
-0.13871 |
|
Xb`` |
0.013 |
0.01313 |
0.01324 |
|
YA |
0.087 |
0.08674 |
0.08635 |
|
YA` |
-0.05 |
-0.0514 |
-0.05857 |
|
YA`` |
-0.087 |
-0.08674 |
-0.08635 |
|
2 |
0.485 |
0.485 |
0.48735 |
|
2` |
-0.141 |
-0.14235 |
-0.1452 |
|
2`` |
-0.234 |
-0.23544 |
-0.2326 |
|
4 |
1.224 |
1.224 |
1.2225 |
|
4` |
-0.069 |
-0.06834 |
-0.0691 |
|
4`` |
-0.134 |
-0.135002 |
-0.1325 |
|
XA |
-0.05 |
-0.0514 |
-0.05857 |
|
XA` |
-0.087 |
-0.08674 |
-0.08635 |
|
XA`` |
0.05 |
0.0514 |
0.05857 |
Часть II «силовой расчет»
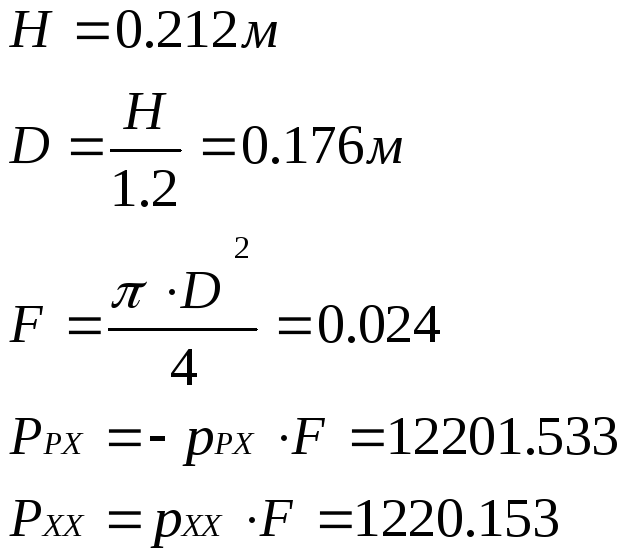
1. Определение рабочей нагрузки:
2. Кинетостатический расчет механизма:
3.1 Исходные данные:
LOA=L1=0.1 м;
LCD=L4= 0.4 м;
=4.0 с-1
MOA=M1= 3кг
MАBC=M2=20.485кг
MB=M3=15 кг
J2 =0.316 кгм2
MCD =15 кг
JB = 0
MD=M5=15 кг
JD = 0
2.2 Определение задаваемых сил и сил инерции:
Силы инерции в проекциях на оси X и Y определяются по следующим формулам:
Фix=-miXCi``i2
Фiy=-miYCi``i2
Mi(Ф)=-Ji i``i2
Где XCi`` и YCi`` координаты ускорений центров масс звеньев
2.3 Составление уравнений кинетостатики:
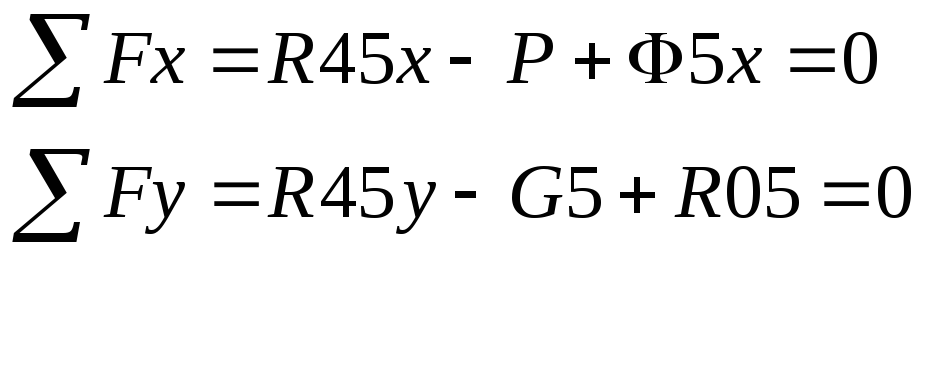
1. Рассмотрим звенья 4 и 5:
Рисунок
10
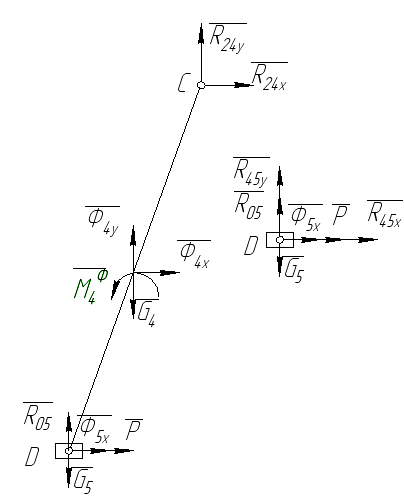
Из уравнений кинетостатики звена 5
и звена 4:
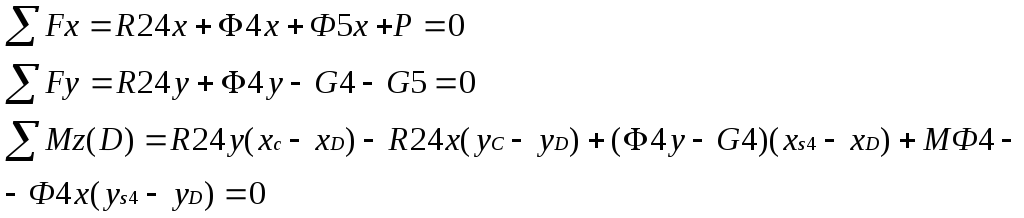
найдем реакции в шарнирах (R24), (R45) и реакцию опоры (R05).
2. Рассмотрим звенья 2 и 3:
Рисунок
11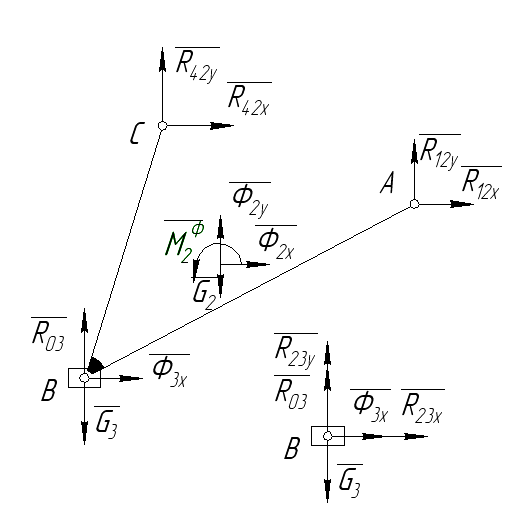
Из уравнений кинетостатики звена 2
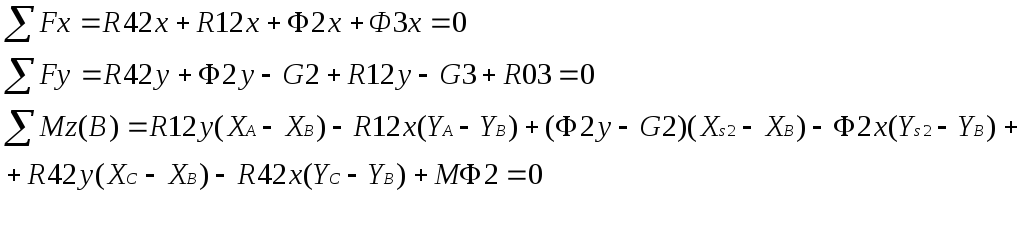
и звена 4:

найдем реакции в шарнирах (R23, R12) и реакцию опоры (R03).
Кривошип:
`
Рисунок
12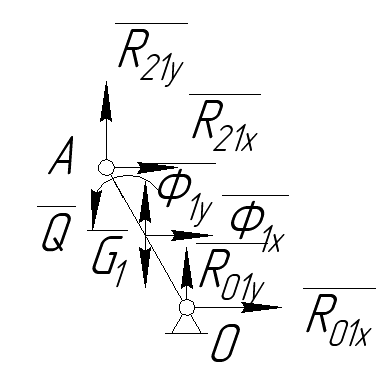
Из уравнений кинетостатики кривошипа
![]()
![]()
![]()
найдем движущий момент
![]()
Найдем движущий момент Q с помощью общего уравнения динамики:

![]()
(Решения соответствующих уравнений кинетостатики содержатся в приложенном файле Mathcad)
3. Сравнение результатов, полученных различными методами:
(для q=120гр.)
|
|
Кинетостатический расчет
|
Машинный расчёт
|
|
R05 |
3573.908 |
3573.905 |
|
R45x |
-1216.881 |
-1216.883 |
|
R45y |
-3426.758 |
-3426.350 |
|
R24х |
-1206.323 |
-1206.318 |
|
R24у |
-3282.605 |
-3282.605 |
|
R03 |
-2516.3 |
-2516.31 |
|
R23х |
3.205 |
3.205 |
|
R23у |
2663.45 |
2663.452 |
|
Q |
124.047 |
124.047 |