

Сравнение результатов, полученных разными методами
При q=120º
|
|
Кинетостатический расчет
|
Машинный расчёт
|
|
R05 |
1768.434 |
1768.42687 |
|
R45x |
-5222.854 |
-5222.6438 |
|
R45y |
-1591.854 |
-1591.7687 |
|
R34х |
-5166.097 |
-5166.08976 |
|
R34у |
-1533.645 |
-1533.6765 |
|
R03х |
1841.916 |
1841.9432 |
|
R03у |
-7036.771 |
-7036.7649 |
|
R13х |
-6918.139 |
-6918.1265 |
|
R12у |
5660.429 |
5660.41786 |
|
Q |
378.269 |
378.267 |
Ч
Рис 1
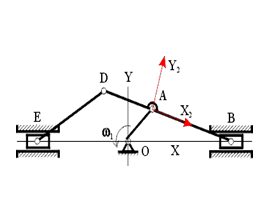
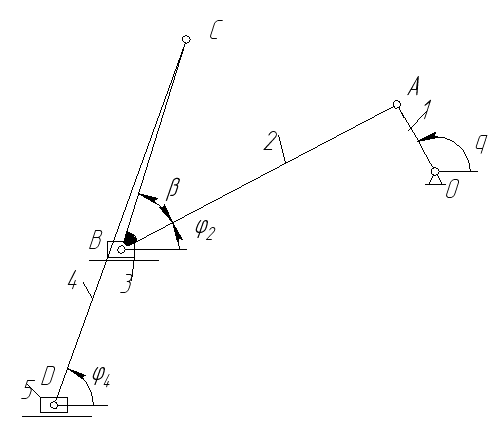
Риc2. Расчетная схема кулисного механизма
Исходные данные
Из заданной базовой схемы (Рисунок 1) путем изменения линейных параметров (длины) звеньев можно получить расчетную схему кулисного механизма (Рисунок 2), анализ которого будет приведен ниже.
Параметры механизма:
ОА=0,1м;
AB=0.4м;
YB=-0.1м;
M1=-1
X2D=0.2м
Y2D=-0.2м
DE=0.5м;
YЕ=-0.3м ;
М2=-1;
ω= 1/с.
2. Структурный анализ
Рис 3. Структурный граф механизма Рис 4. Граф механизма
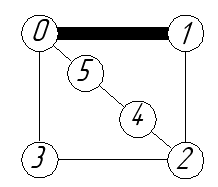

Число
подвижных звеньев механизма
![]() количество
кинематических пар совпадает с числом
подвижностей пар
количество
кинематических пар совпадает с числом
подвижностей пар![]()
Число степеней подвижности для расчетного механизма определяется по формуле Чебышева для плоских механизмов:
W=3(N-1)-2PH-PB, (1)
Где N-число звеньев механизма, РН- число низших кинематических пар, РВ-число высших кинематических пар.
W=3(6-1)-2ּ7=1
3. Геометрический анализ
Геометрический анализ включает построение плана механизма в различных положениях в зависимости от входной координаты (q), составление групповых уравнений и их решения в общем виде.
Групповые уравнения и их решение
Групповыми уравнениями определяются координаты характеристических точек при различных положениях частей механизма в зависимости от входной координаты. Для расчетного механизма групповые уравнения имеют вид:
Запишем уравнения совместности для кривошипа:
XA=L1cos (q)
YA=L1sin (q)
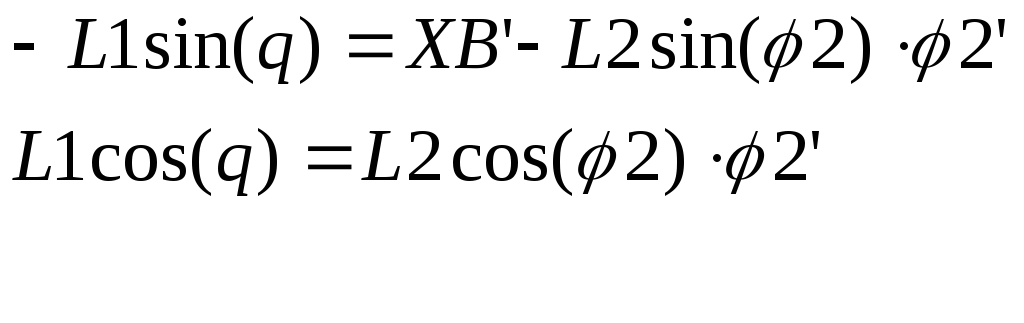
Для группы ВBП1:
![]()
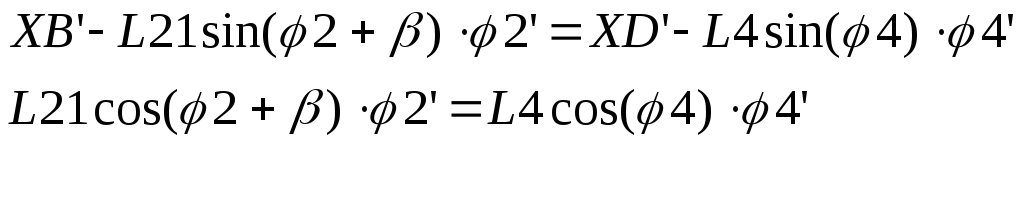
Для группы ВВП2:
![]()
(Соответствующие углы и точки обозначены на плане 12 положений механизма, рис.5;
решения соответствующих групповых уравнений содержатся в приложенном файле Mathcad)
3.2 Особые положения и сборки
Группа ВВП1:
Попадает в особое положение, когда звенья 1 и 2 выстраиваются в одну линию либо накладываются друг на друга:
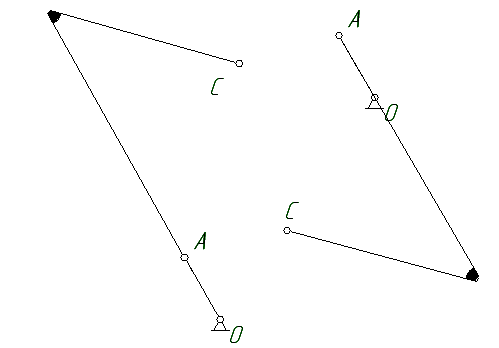
Группа ВВП2:
Особое положение группы ВВП имеет место при выполнении условия:
![]()
т.
е. когда
![]() .
.
Варианты сборки группы:

Рис
3.3 Рис.3.2
4. Кинематический анализ:
4.1 Аналитическое определение аналогов скоростей
Для кривошипа:
XA` = -L1Sin(q)
YA` = L1Cos(q)
Для группы ВBП1:
Для группы ВВП2:
4.2Aналитическое определение аналогов ускорений
Для кривошипа:
XA`` = -L1Cos(q)
YA`` = -L1Sin(q)
Для группы ВBП1:

Для группы ВВП2:

(Решения соответствующих групповых уравнений содержатся в приложенном файле Mathcad)