

Структурный анализ механизма.
Целью структурного анализа механизма является определение количества звеньев и кинематических пар, классификация последних, определение подвижности пар и степени подвижности механизма, а также выделение в нем структурных групп – кинематических цепей, у которых число входов совпадает с числом степеней подвижности.
1. Звенья механизма: 1 – кривошип; 2 ,4 – шатун; 3 – коромысло; 5 – ползун.
Структурная схема механизма:
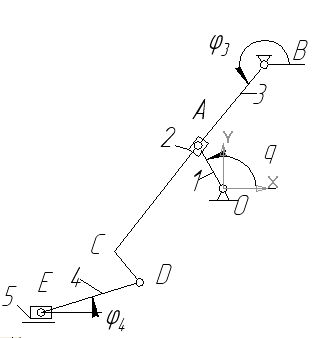
Рис.2.1. Структурная схема механизма
Граф механизма:

Рис. 3. Структурный граф механизм
![]() (один
вход О-А ).
(один
вход О-А ).
Число подвижных звеньев механизма N=5.
Количество кинематических пар механизма P=7.
Степень подвижности механизма W=S-3K=7-6=1.
Механизм нормальный, т.к. n=W
.

4. Граф механизм
Группа ВПВ состоит из звена ОА и звена BCD , шарнирно связанных между собой.
Группа ВВП состоит из звена DE и ползуна E, также шарнирно связанных между собой. Ползун E движется в вертикальной заделке.
Граф структуры (рисунок 4) описывает качественную взаимосвязь структурных групп.
Граф структуры представляет собой базу, которая связана с двумя структурными группами: ВПВ – двухзвенная и нуль подвижная; ВBП – также двухзвенная и нуль подвижная.
Определим число степеней подвижности (Wп) для расчетного механизма по формуле Чебышева для плоских механизмов:
Wп=3(N-1)-2Pн-Pв, (1)
где N – число звеньев механизма;
Pн – число низших кинематических пар;
Pв – число высших кинематических пар.
Для заданного расчетного механизма N = 6; Pн = 7; Pв = 0:
Wп = 3 (6 - 1) – 2 7 - 0=3 5 – 14 = 1
В результате расчетов получено значение числа степеней подвижности, равное «1». Это означает, что для работы механизма необходимо задать одну входную координату, в чем можно убедиться на основании визуального анализа рисунка 1.
Геометрический анализ
Геометрический анализ включает построение плана механизма в различных положениях в зависимости от входной координаты (q), составление групповых уравнений и их решения в общем виде.
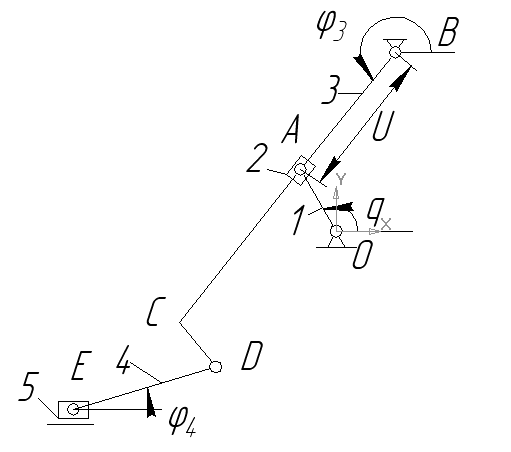
Рис.3.1 Схема механизма
3.1 План двенадцати положений механизма
В соответствии с заданием построен план двенадцати положений механизма, на котором можно определить характер и траектории движений различных характеристических точек расчетного механизма.
План 12-и положений смотри на листе приложение. На приложении выделено положение q=120
3.1Групповые уравнения и их решение
Групповыми уравнениями определяются координаты характеристических точек при различных положениях частей механизма в зависимости от входной координаты. Для расчетного механизма групповые уравнения имеют вид:
Запишем уравнения совместности для кривошипа:
XA=L1cos (q)
YA=L1sin (q)
Группа ВПВ:
L1cos (q) =XВ + U cos (φ3)
L1sin (q) =YB+ U sin (φ3)
Группа ВВП:
XB + L3cos (φ3) +L31cos φ3 =XE + L4cos (φ4)
YB + L3sin (φ3) + L31sin (φ3) = YE+ L4sin (φ4)
Запишем выражение для нахождения длины U коромысла.
___________________________
U=√ (L1cos(q)-XB)2 +(L1sin(q)-YB)2
Запишем выражение для нахождения углов φ3 и φ4.
s in(φ4)=YB+L3sin(φ3)+L31sin(φ3)-YE
in(φ4)=YB+L3sin(φ3)+L31sin(φ3)-YE
L4

 cos
(φ3) = XA-XB sin (φ3) = YA-YB
cos
(φ3) = XA-XB sin (φ3) = YA-YB
U U
(Решения данных уравнений находятся в приложении MathCad «Протокол»)