

3.2 Особые положения и сборки
Группа ВПB:
Якобиан исходной системы уравнений группы ВПВ:
![]()
Механизм имеет особое положение при U=0.
Группа ВBП:
Якобиан исходной системы уравнений группы ВВП:

Особое
положение при
![]()
Кинематический анализ:
4.1 Аналитическое определение аналогов скоростей
Для кривошипа:
X
L1Cos(q)
YA` = L1·cos(q)
Для группы ВПB:
![]()
Для группы ВВП:
![]()
2.Аналитическое определение аналогов ускорений
Для кривошипа:
XA`` = -L1Cos(q)
YA`` = -L1Sin(q)
Для группы ВПВ:

Для группы ВВП:

(Решения соответствующих групповых уравнений содержатся в приложенном файле Mathcad)
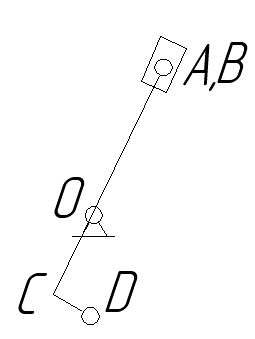
4.3 Графоаналитическое определение аналогов скоростей
__ __ __
ОА = ОВ + ВА
__ __ __ __ __
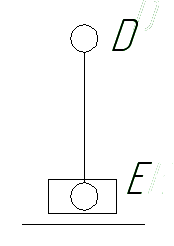
ОВ + ВС + СD = OE + ED
VA = VA1A3 + VA3
VD = VE + VDE
Коэффициент пропорциональности аналогов скоростей:
Kv=![]() =0.0075H/c·мм
=0.0075H/c·мм
Вычисление аналогов скоростей для q=120гр.
Ω3=![]() =-0.841
=-0.841
VU=![]() =0.561
=0.561
Ω4=![]() =1.061
=1.061
VE=![]() =-0.368
=-0.368
4.4 Графоаналитическое определение аналогов ускорений
Векторные уравнения для ускорений:
TD + ND = WE + TDE + NDE
Коэффициент пропорциональности аналогов ускорений:
KW=![]() =0.03H/c2·мм
=0.03H/c2·мм
Вычисление аналогов ускорений для q=120гр.
E3=![]() =14.812
=14.812
WU=![]() =1.244
=1.244
E4=![]() =-16.754
=-16.754
We=![]() =7.092
=7.092
(Соответствующие планы аналогов скоростей и ускорений содержатся в приложении)
5.Сравнение результатов, полученных разными методами: (при q=120)
|
|
Аналитический метод
|
Графоаналитический метод
|
Машинный расчет |
|
XА |
-0.06 |
-0.06 |
-0.062 |
|
XА` |
-0.104 |
-0.1015 |
-0.1016 |
|
XА`` |
0.06 |
-0.06 |
-0.062 |
|
YА |
0.104 |
0.1015 |
0.1016 |
|
YА` |
-0.06 |
-0.06 |
-0.062 |
|
YА`` |
-0.104 |
-0.1015 |
-0.1016 |
|
XЕ |
-0.441 |
-0.44056 |
-0.43845 |
|
XE` |
-0.074 |
-0.07454 |
-0.0742 |
|
XE`` |
0.284 |
0.284554 |
0.28755 |
|
3 |
-2.255 |
-2.24567 |
-2.23467 |
|
3` |
-0.168 |
-0.1677 |
-0.1665 |
|
3`` |
0.592 |
-0.59762 |
-0.59246 |
|
4 |
0.292 |
0.292133 |
0.284133 |
|
4` |
0.212 |
0.213422 |
0.212922 |
|
4`` |
-0.671 |
-0.676 |
-0.65876 |
|
XD |
-0.202 |
-0.2023 |
-0.20263 |
|
YD |
-0.228 |
-0.22723 |
-0.22687 |
Часть II «силовой расчет»
Определение рабочей нагрузки:
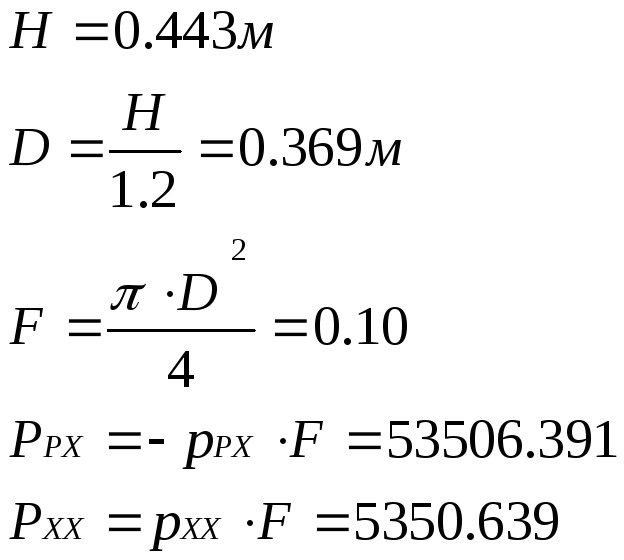
Кинетостатический расчет механизма:
1 Исходные данные:
L1=LOA= 0.12 м;
L4=LDE= 0.25 м;
=5.0 с-1
M1=MOA =3.6кг
M3=MBCD=21кг
M4=MDE =7.5 кг
JDE = 0,039 кгм2
M2=MC =1.8 кг
JC = 0
M5=ME =18 кг
JE = 0
3.2 Определение задаваемых сил и сил инерции:
Силы инерции в проекциях на оси X и Y определяются по следующим формулам:
Фix=-miXCi``i2
Фiy=-miYCi``i2
Mi(Ф)=-Ji i``i2
Где XCi`` и YCi`` координаты ускорений центров масс звеньев
3.3 Составление уравнений кинетостатики:
1. Рассмотрим звено 4 и 5:
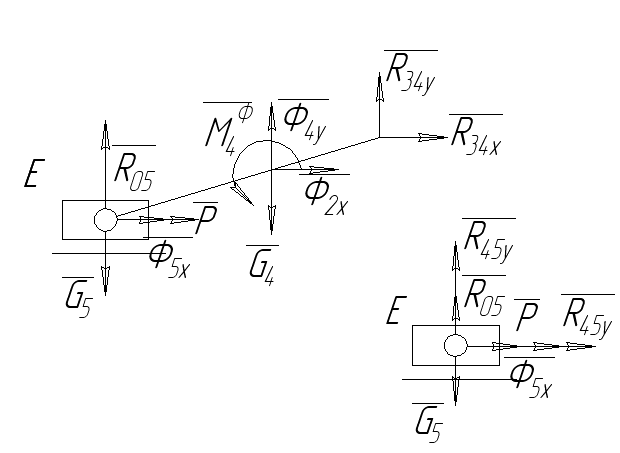
Рисунок
10
Из уравнений кинетостатики звена 4

и звена 5:
найдем реакции в шарнирах (R34),(R45) и реакцию опоры (R05).
2. Рассмотрим звено 2 и 3:
Рисунок
11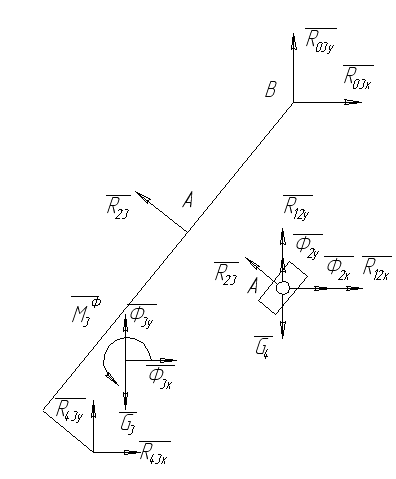
Из уравнений кинетостатики звена 3
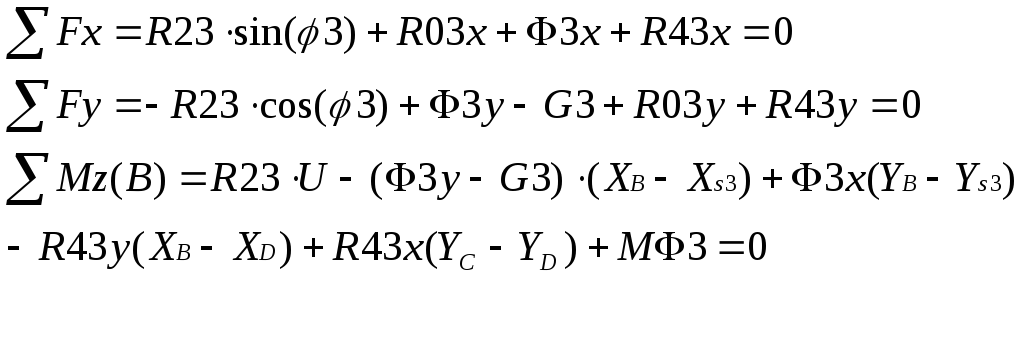
и звена 2:

найдем реакции в шарнирах (R23),( R12) и реакцию опоры (R03).
Кривошип:

Рисунок
12
Из уравнений кинетостатики кривошипа
![]()
![]()

найдем движущий момент
![]()
Найдем движущий момент Q с помощью общего уравнения динамики:

![]()
(Решения соответствующих уравнений кинетостатики содержатся в приложенном файле Mathcad)