

14.9. Векторная диаграмма фазы асинхронного двигателя
У работающего асинхронного двигателя частота тока в цепи ротора во много раз меньше частоты тока в цепи статора. Но векторные диаграммы строятся для синусоидальных величин одинаковой частоты; следовательно, ЭДС и ток ротора нельзя изобразить векторами на одной общей диаграмме с напряжениями и токами статора.
Однако в частном случае, когда ротор не вращается, частоты токов в цепях ротора и статора совпадают и построение векторной диаграммы
может
быть выполнено на общих основаниях.
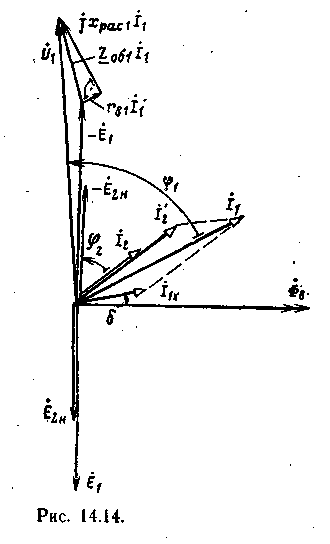
Такая диаграмма (рис. 14.14)
во многом похожа на диаграмму
нагруженного трансформатора (см. рис.
8.11). Она строится для одной фазы
двигателя, и ее исходным вектором
служит вектор
![]() в
магнитного потока вращающегося
магнитного поля
двигателя. Этот постоянный по значению
магнитный поток распределен
синусоидально вдоль окружности машины.
Вращаясь с частотой вращения
n1,
он
индуктирует в неподвижных
фазных обмотках статора и ротора
синусоидальные ЭДС; следовательно,
по отношению к этим обмоткам
он эквивалентен переменному магнитному
потоку, синусоидально изменяющемуся
во времени, и может быть
изображен вектором на диаграмме
двигателя. По отношению к вектору
потока векторы ЭДС, индуктируемых
им в фазных обмотках статора
(
в
магнитного потока вращающегося
магнитного поля
двигателя. Этот постоянный по значению
магнитный поток распределен
синусоидально вдоль окружности машины.
Вращаясь с частотой вращения
n1,
он
индуктирует в неподвижных
фазных обмотках статора и ротора
синусоидальные ЭДС; следовательно,
по отношению к этим обмоткам
он эквивалентен переменному магнитному
потоку, синусоидально изменяющемуся
во времени, и может быть
изображен вектором на диаграмме
двигателя. По отношению к вектору
потока векторы ЭДС, индуктируемых
им в фазных обмотках статора
(![]() х)
и ротора (E2н),
отстают на угол
90° (2.33). Электродвижущая сила
х)
и ротора (E2н),
отстают на угол
90° (2.33). Электродвижущая сила
![]() 2н
создает в короткозамкнутой обмотке
неподвижного ротора ток
2н
создает в короткозамкнутой обмотке
неподвижного ротора ток
I2
=
Е2H/
![]()
По фазе этот ток отстает от вектора (—Е2H) на угол (8.36)
ф2
= arctg(![]() Lpac2/rB2).
Lpac2/rB2).
Стержни
или проводники обмотки ротора с трех
сторон окружены ферромагнетиком,
поэтому индуктивность Lрac
2
относительно
велика и
в неподвижном роторе, пока f2
= f,
ток
![]() 2
значительно отстает по фазе
от (—
2
значительно отстает по фазе
от (—![]() 2н
). Для наглядности на рис. 14.14 векторы
тока и ЭДС ротора построены в масштабе,
отличном от масштаба статорных величин.
Току ротора I2
соответствует в фазной обмотке статора
компенсирующий
его приведенный ток
2н
). Для наглядности на рис. 14.14 векторы
тока и ЭДС ротора построены в масштабе,
отличном от масштаба статорных величин.
Току ротора I2
соответствует в фазной обмотке статора
компенсирующий
его приведенный ток
![]() ’2
(14.15).
’2
(14.15).
Кроме
того, часть тока в обмотке статора (ток
![]() 1х)
возбуждает магнитный
поток
1х)
возбуждает магнитный
поток
![]() в
машины; вектор этого тока опережает
вектор магнитного потока на угол б
вследствие потерь энергии на гистерезис
и вихревые
токи в магнитной цепи. Вектор тока
статора равен сумме векторов
этих двух токов:
в
машины; вектор этого тока опережает
вектор магнитного потока на угол б
вследствие потерь энергии на гистерезис
и вихревые
токи в магнитной цепи. Вектор тока
статора равен сумме векторов
этих двух токов:
![]() 1
=
1
=![]() ’2
+
’2
+
![]() 1х
1х
Вектор напряжения между выводами фазной обмотки статора можно построить на основании уравнения (14.11а):
![]() 1
= (—
1
= (—![]() 1)
+
Zo61
1)
+
Zo61![]() 1
= (—
1
= (—![]() 1)
+rв1
1)
+rв1![]() 1
+jxрас1
1
+jxрас1![]() 1
1

Векторная диаграмма одной фазы двигателя при неподвижном роторе по существу тождественна векторной диаграмме трансформатора при короткозамкнутой вторичной обмотке. При заторможенном двигателе падение напряжения в фазной обмотке статора Zo61 I1 велико, вследствие чего ЭДС E1 a значит, и магнитный поток Фв (14.10), примерно вдвое меньше, чем при рабочих условиях двигателя. Таким образом, по количественным соотношениям
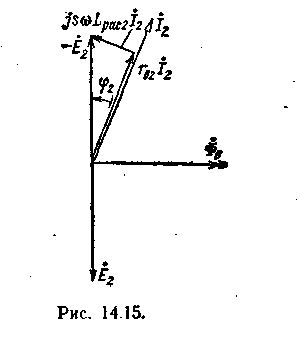
диаграмма заторможенного двигателя должна очень существенно отличаться от диаграммы вращающегося двигателя.
Основной трудностью при построении векторной диаграммы работающего двигателя является различие частот цепей статора (частота f) и ротора (частота f2 = fs).
Можно
ограничиться построением двух отдельных
диаграмм для цепей
ротора (рис. 14.15) и статора (рис. 14.16). Для
обеих диаграмм исходным
вектором удобно считать вектор
![]() в
магнитного потока вращающегося
поля. Этот поток по отношению к фазной
обмотке вращающегося
ротора эквивалентен потоку, неподвижному
по отношению к ротору и изменяющемуся
во времени по синусоидальному закону
с
частотой f2.
По отношению к неподвижной фазной
обмотке статора поток
в
магнитного потока вращающегося
поля. Этот поток по отношению к фазной
обмотке вращающегося
ротора эквивалентен потоку, неподвижному
по отношению к ротору и изменяющемуся
во времени по синусоидальному закону
с
частотой f2.
По отношению к неподвижной фазной
обмотке статора поток
![]() в
эквивалентен неподвижному потоку,
изменяющемуся во времени
синусоидально с частотой f.
в
эквивалентен неподвижному потоку,
изменяющемуся во времени
синусоидально с частотой f.
В рабочих условиях
асинхронного двигателя скольжение s
== 0,02
![]() 0,04,
вследствие чего частота тока в цепи
ротораf2
= fs
мала,
а значит, мало и пропорциональное ей
индуктивное сопротивление
s
0,04,
вследствие чего частота тока в цепи
ротораf2
= fs
мала,
а значит, мало и пропорциональное ей
индуктивное сопротивление
s![]() Lpac2;
по этой причине на диаграмме ротора
вектор тока
Lpac2;
по этой причине на диаграмме ротора
вектор тока
![]() 2
2
отстает от вектора
(—![]() 2
) лишь
на небольшой угол:
2
) лишь
на небольшой угол:
ф2
= arccos
[rB2/![]() ].
].
Вектор
намагничивающего тока
![]() 1х
на векторной диаграмме статора должен
опережать вектор
1х
на векторной диаграмме статора должен
опережать вектор
![]() в
на угол потерь в магнитной цепи
в
на угол потерь в магнитной цепи
![]() ,
а положение
вектора
,
а положение
вектора
![]() ’2
— приведенного тока ротора определяется
положением
вектора
’2
— приведенного тока ротора определяется
положением
вектора
![]() 2
по отношению к
2
по отношению к
![]() в.
Таким образом, вектор
в.
Таким образом, вектор
![]() ’2
должен
опережать
’2
должен
опережать![]() в
на угол 90° — ф2.
в
на угол 90° — ф2.
Пользуясь далее
(4.15) и (4.11а), нетрудно построить векторы
тока
![]() 1
и напряжения
1
и напряжения
![]() 1
фазы
статора аналогично диаграмме
трансформатора
или заторможенного двигателя.
1
фазы
статора аналогично диаграмме
трансформатора
или заторможенного двигателя.
Две раздельные диаграммы цепей статора и ротора не показывают влияние механической нагрузки двигателя на его электрическое со стояние. Чтобы уяснить это влияние, можно обратиться к трансфор матору, энергетические соотношения в котором те же, что и в асин хронном двигателе. Это осуществляется путем приведения цепи ро тора к частоте статора. Ток в роторе можно выразить следующим об разом:
I2
= E2/![]() =
Е2
n/
=
Е2
n/![]() .
.
Разделив числитель и знаменатель уравнения тока на скольжение s, мы получили в знаменателе под корнем индуктивное сопротивление рассеяния фазной обмотки ротора при частоте сети, складывающееся с активным сопротивлением rB2/s >гв2. Величину rB2/s мы можем рассматривать как сумму активного сопротивления фазной обмотки ротора гв2 и некоторого добавочного активного сопротивления r2, во много раз большего, чем rв2. Таким образом,
rB2/s = rB2 + r2(s). (14.16)
Вместе с тем, разделив Ег на s, мы заменили малую ЭДС, индуктируемую в фазной обмотке ротора, во много раз (25—50) большей ЭДС Е2H. Эта величина называется ЭДС фазной обмотки ротора, приведенной к частоте статора.
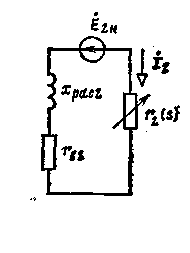
Сопротивление этого резистора соответствует механической механической нагрузке; мощность резистора равна r2I22 и равна механической мощности, развиваемой ротором в одной фазе.
Таким образом, работающий асинхронный двигатель для расчетов может быть заменен эквивалентным неподвижным, причем цепь фазной обмотки ротора замкнута на резистор с сопротивлением
r2 = rB2(1 -s)/s. (14.17)
![]()
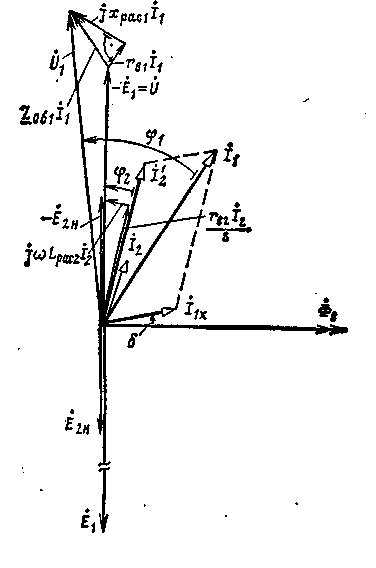
рис. 14.18
После
такой замены легко построить общую
векторную диаграмму одной
фазы статора и ротора двигателя, причем
порядок построения тот
же, что и для трансформатора или двигателя
при заторможенном роторе
(см. рис. 14.14). Исходным вектором служит
![]() в
(рис. 14.18), по
отношению к которому ЭДС фазы ротора,
приведенного к условиям трансформатора
в
(рис. 14.18), по
отношению к которому ЭДС фазы ротора,
приведенного к условиям трансформатора
![]() 2H,
отстает
на угол 90°, так же как и ЭДС фазы статора
2H,
отстает
на угол 90°, так же как и ЭДС фазы статора
![]() 2.
2.
Приведенная
к частоте статора ЭДС фазы ротора
![]() 2н,
действующая в
схеме замещения, является одной из
важных расчетных величин для асинхронного
двигателя. Отметим, что ее значение
примерно вдвое больше ЭДС
2н,
действующая в
схеме замещения, является одной из
важных расчетных величин для асинхронного
двигателя. Отметим, что ее значение
примерно вдвое больше ЭДС
![]() 2H,
индуктируемой
фактически в фазной обмотке ротора
заторможенного двигателя (масштабы
для роторных и статорных величин на
рис. 14.18 взяты
различными). Это объясняется тем,
что во втором случае падение напряжения
Zоб1
I1
в фазной обмотке больше из-за большего
тока.
2H,
индуктируемой
фактически в фазной обмотке ротора
заторможенного двигателя (масштабы
для роторных и статорных величин на
рис. 14.18 взяты
различными). Это объясняется тем,
что во втором случае падение напряжения
Zоб1
I1
в фазной обмотке больше из-за большего
тока.
По
отношению к (—![]() 2н)
ток
2н)
ток
![]() 2
отстает на угол
2
отстает на угол
ф2
= arctg [![]() Lpac
2/(rB
2
+
г2)]
=
arctg(s
Lpac
2/(rB
2
+
г2)]
=
arctg(s![]() Lpac2/rB2),
Lpac2/rB2),
т.
е. это тот же сдвиг фаз, который
имеет место во вращающемся
роторе между(—![]() 2)
и
током
2)
и
током
![]() 2
(см. рис. 14.15).
2
(см. рис. 14.15).
Вторичная цепь
имеет активное сопротивление rв2
+ r2
=
rB2/s
и
индуктивное сопротивление
![]() Lpac2.
Соответственно ЭДС
Lpac2.
Соответственно ЭДС
![]() 2н
состоит
из активной
составляющей
rB
2н
состоит
из активной
составляющей
rB![]() 2
/s
и
реактивной составляющей j
2
/s
и
реактивной составляющей j![]() Lрас
Lрас![]() 2
.
Вектор
приведенного
тока фазы ротора
2
.
Вектор
приведенного
тока фазы ротора
I’2
= (m2w2ko6
2/3![]() ko61)
ko61)
![]() 2
,
2
,
а ток фазы статора
![]() 1
=
1
=![]() 2
+
2
+![]() 1x.
1x.
Наконец, вектор напряжения фазы статора строится на основании уравнения
![]() 1
= (—
1
= (—![]() 2
)+ rв1
2
)+ rв1![]() 1
+ jxpac1
1
+ jxpac1![]() 1
1