

termex / Theoretical_Mechanics_part_01_08
.pdfКинематика |
|
|
|
|
|
|
|
|
|
Краткий курс Теоретической Механики |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
§ 8. Сложное движение точки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
~r |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vra |
= |
dr |
и vrr = |
dr |
. |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
8.1. Основные понятия. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
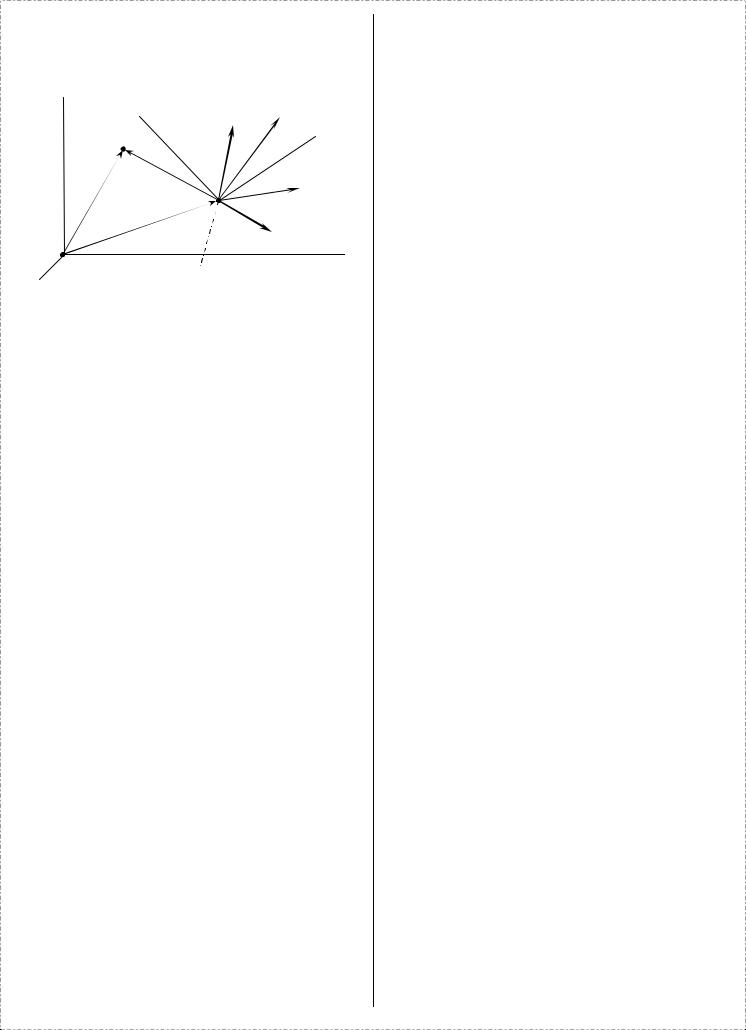
Переносная скорость ve точки |
|
M есть скорость той |
|||||||||||||||||||||||||||||||||||||||||||||||||||
Пусть |
точка |
M движется |
относительно |
некоторой |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
подвижной системы отсчета Oxyz , которая в свою очередь |
неизменно связанной с триэдром Oxyz точки пространства |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
перемещается по отношению к основной (неподвижной) |
|
M′, в которой в данный момент находится точка M . |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
системе |
Ωξηζ . |
Тогда движение, скорость и |
ускорение |
|
|
|
Тогда по формуле Эйлера ve = ω×r и |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
точки, рассматриваемые |
по |
отношению |
к |
подвижной |
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
~r |
|
r |
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
системе |
Oxyz , |
называются |
|
|
относительными, а |
по |
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
+ ω× r |
или |
|
va |
= vr + ve . |
|
(8.1) |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
dt |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
отношению к системе Ωξηζ – абсолютными. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Движение подвижной системы Oxyz по отношению к |
|
|
|
Приведем |
|
|
|
|
другое |
|
|
|
доказательство |
|
справедливости |
||||||||||||||||||||||||||||||||||||||||||||||||||||
формулы (8.1). Пусть i, j, k |
суть единичные координатные |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
неподвижной |
Ωξηζ |
является для движущейся точки |
M |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
переносным движением. |
|
|
|
|
|
|
|
|
|
|
векторы подвижного триэдра Oxyz , тогда |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
Скорость и ускорение той неизменно связанной с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rr = rxi + ry j + rzk . |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
подвижной |
системой |
отсчета |
Oxyz |
точки пространства |
|
|
|
Дифференцируя по времени, получим: |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
M′, в которой в данный момент находится движущаяся |
|
|
|
|
|
r |
|
|
|
r |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
drr |
|
|
dr |
|
|
|
|
|
|
|
|
dry r |
|
|
|
|
r |
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
точка M , называются переносными. |
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
di |
|
|
|
dj |
|
|
dk |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
x |
|
i |
+ |
|
|
|
|
|
|
j + |
|
|
z |
k |
|
+ |
r |
|
|
|
|
+ r |
|
+ r |
|
|
|
, |
|||||||||||
Другими словами, |
переносную скорость и переносное |
|
|
|
|
|
|
|
|
dt |
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
dt |
dt |
||||||||||||||||||||||||||||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x dt |
|
y |
|
z |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ускорение |
точки |
M можно |
в |
каждый момент времени |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
где |
|
|
|
первые |
|
три |
члена |
|
дают |
локальную |
производную |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
представить себе как ту скорость и то ускорение, которые |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
движущаяся точка M имела бы в данный момент, если она |
|
~r |
|
|
|
r |
|
|
|
|
|
r |
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
начиная с этого момента оказалась бы жестко связанной с |
|
|
|
|
|
|
= r&xi |
+ r&y j |
|
+ r&zk , |
так |
как |
они |
представляют |
собой |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
dt |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
подвижной |
системой |
Oxyz |
|
|
(т.е. |
не |
совершала |
бы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
производную |
|
|
|
вектора |
|
|
|
r |
|
при |
|
условии, |
что |
|
i, j, k |
||||||||||||||||||||||||||||||||||||||||||||||||||
относительного движения). |
|
|
|
|
|
|
|
|
|
постоянны. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
8.2. Полная и относительная производные от вектора. |
|
|
|
Производные единичных векторов есть скорости их |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Пусть подвижная |
Oxyz и неподвижная |
Ωξηζ системы |
концов, т.е. скорости точек неизменяемой системы, которой |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
является |
триэдр |
Oxyz , |
тогда |
|
по |
формуле |
Эйлера |
||||||||||||||||||||||||||||||||||||||||||||
отсчета имеют общее начало O , и пусть ω есть мгновенная |
|
r |
|
|
|
r |
|
|
r |
|
r |
|
|
|
|
r |
|
|
r |
r |
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
угловая скорость подвижной системыOxyz по отношению |
& |
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
и окончательно |
|
|
|
|
|
||||||||||||||||||||||||||||||||||
i = ω× i, |
|
j |
= ω× j, |
k |
= ω× k |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
к неподвижной. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
dr |
|
|
|
|
r |
|
|
|
r |
|
|
r |
|
|
|
r |
|
|
dr |
|
|
r |
r |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
= |
|
~r |
|
+ ω× (rxi + ry j + rzk) = |
~r |
+ ω× r. |
|
|
|
|
|||||||||||||||||||||||||||||||
Рассмотрим |
точку |
M , |
|
совершающую |
движение, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
dt |
|
dt |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
которое не зависит от движения триэдра Oxyz . Ее радиус- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
Заметим, что формула (8.1) сохраняет свой вид и тогда, |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
вектор r |
будет, очевидно, с течением времени изменяться в |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
когда трехгранник Oxyz , |
кроме вращения вокруг точки O , |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
каждой из систем отсчета по разным законам. |
|
|
совершает еще и поступательное движение, т.е. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
ζ |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
z |
|
|
|
|
|
M |
|
|
|
перемещается как свободное твердое тело. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этом случае единичные векторы |
i, j, k |
осей триэдра |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
ω |
|
|
|
r |
|
|
|
|
|
y |
|
|
Oxyz |
|
|
не изменяются и формулы |
|
r& |
|
|
r |
r |
, |
r& |
|
r |
r |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
= ω× i |
j |
= ω× j , |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
η |
|
|
|
r& |
|
|
|
r |
|
|
|
r |
сохраняют свой вид. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
k = ω× k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим частные случаи: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
~r |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
ξ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
dr |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
система Oxyz неподвижна, тогда ω = |
0, |
|
|
|
= |
|
|
; |
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
dt |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
вектор |
r |
|
неподвижен по отношению к Oζηζ , тогда |
||||||||||||||||||||||||||||||||||||||||||||||||
Тогда за промежуток времени ∆t |
вектор r |
получит по |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
~r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
отношению к осям Oξηζ |
и |
Oxyz |
разные приращения, |
|
|
|
|
|
dr |
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ r |
|
|
|
|
|
|
|
|
|
|
= 0 и |
|
|
|
|
|
|
|
= −ω×r |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
которые мы соответственно обозначим через ∆r |
|
|
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
и ∆r . |
|
3. |
вектор |
r |
|
неизменно |
|
связан |
с |
триэдром |
Oxyz , |
|
тогда |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
Пределы отношений ∆r |
|
~ r |
|
|
→ 0 дадут |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
и ∆r к ∆t при ∆t |
|
|
|
|
|
|
~r |
|
|
|
|
|
|
|
r |
|
|
r |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
соответственно производные |
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
|
|
|
|
|
dr |
|
|
, |
т.е. |
|
скорость |
конца |
вектора |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0, |
|
|
|
|
|
|
|
|
|
|
= ω× r |
|
r |
||||||||||||||||||||||||||||||||||||||
|
|
~r |
|
~ r |
|
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
dr |
= |
lim |
∆r |
|
и |
|
dr |
= |
lim |
∆r . |
|
|
|
|
|
определяется в этом случае как скорость точки АТТ, |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
∆t→0 dt |
|
|
|
dt |
∆t→0 dt |
|
|
|
|
|
«скрепленного» с подвижным триэдром Oxyz . |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Производную |
dr dt |
будем |
называть |
«абсолютной» |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8.3. Теорема о сложении ускорений. |
||||||||||||||||||||||||||||||||||||
или «полной», а производную |
~r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
dr dt «относительной» |
|
|
|
Пусть |
|
|
система |
Oxyz |
|
|
движется |
|
|
относительно |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
или «локальной», причем из определений относительной |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
неподвижной системы Ωζηζ как свободное твердое тело. |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
vr и абсолютной va |
скоростей следует, что |
|
|
|
|
|
Обозначим через vo |
|
и wo |
скорость и ускорение начала |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(полюса) O по отношению к осям Ωζηζ , а мгновенную |
|||||||||||||||||||||||||||||||||||||||||||||||||||
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 марта 2007 г. |
|
||||||||||||||||||||||||||||||||||||||||||||
Кинематика |
Краткий курс Теоретической Механики |
28 |
угловую скорость и угловое ускорение трехгранника Oxyz по отношению к тем же осям Ωζηζ , через ωe и εe .
Рассмотрим точку M , совершающую движение, которое вообще не зависит от движения системы Oxyz .
ζ |
z |
|
εe |
|
|
|
|
ωe |
y |
|
M |
|
|
|
|
|
|
|
|
ρ |
r |
O |
|
vo |
|
|
|
||
|
ρo |
|
wo |
|
Ω |
|
|
η |
|
|
|
|
||
ξ |
|
x |
|
|
|
|
|
|
|
Обозначим |
через ρ |
и r ее абсолютный и |
||
относительный радиус-векторы, а через ρo радиус-вектор точки O , тогда в любой момент времени
ρ = ρo + r . |
(8.2) |
Возьмем от обеих частей этого равенства полную производную по времени и, с учетом полученных выше формул, будем иметь:
vr |
= |
dρr |
= |
|
dρro |
+ |
drr |
= |
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||||
a |
|
dt |
|
|
|
dt |
|
dt |
|
|
|
|
(8.3) |
|
|
|
r |
|
|
~r |
|
r |
|
r |
r |
r |
r |
||
|
|
|
|
dr |
|
|
r |
|||||||
|
= vo |
+ |
|
|
|
+ ωe × r |
= vo |
+ ωe |
× r |
+ vr . |
||||
|
|
dt |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Но vo |
+ ωe × r есть скорость той неизменно связанной |
|||||||||||||
с системой Oxyz точки |
M′, в которой в данный момент |
|||||||||||||
находится точка |
M , следовательно, по определению это – |
|||||||||||||
переносная скорость, т. е. |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
ve |
= vo + ωe ×r . |
|
(8.4) |
||||
В результате из (8.3) получаем: |
|
|
|
|||||||||||
|
|
|
|
|
|
|
va |
= ve + vr , |
|
(8.5) |
||||
т.е. мы другим путем доказали теорему о сложении скоростей.
Величину абсолютной скорости можно вычислить по
следующей формуле v2 |
= v2 |
+ v2 |
+ 2v v |
r |
cos γ , где γ – |
a |
e |
r |
e |
|
угол между векторами скоростей ve и vr .
Возьмем теперь производные от обеих частей равенства
(8.5) с учетом (8.4):
dva |
= |
dve |
+ |
dvr |
|
|
|
= |
|
|
|
|
|
|
|||
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||
dt |
|
|
dt |
|
|
|
|
|
|
dvr |
|
|
|
|
|||
|
|
d |
|
r |
r |
|
|
|
r |
|
|
|
|
|
|||
= |
|
(v |
+ ω |
|
|
|
× r) + |
r |
= |
|
|
|
|||||
dt |
|
|
|
dt |
|
|
|
||||||||||
|
|
|
|
o |
r |
|
e |
|
|
r |
|
r |
|||||
|
|
r |
|
|
|
|
|
|
|
r |
r |
|
|
||||
|
|
dv |
o |
|
|
dω |
e |
|
|
dr |
|
dv |
|||||
= |
|
|
+ |
|
|
× r |
+ ωe × |
|
+ |
r |
. |
||||||
dt |
|
|
|
dt |
|
||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
dt |
|||||
Применяя здесь формулу (8.1) к r и vr получим:
r |
|
r |
|
r |
|
r |
r |
|
|
|
|
~r |
r |
|
|
r |
|
||
|
dv |
|
dω |
e |
|
|
dr |
|
|
|
|||||||||
w |
= |
o |
+ |
|
× r |
+ ω |
|
× |
|
|
|
|
+ ω |
|
|
× r |
|
+ |
|
|
|
|
e |
|
e |
|
|||||||||||||
a |
|
dt |
|
dt |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
(8.6) |
||||||
|
|
|
|
|
|
|
|
|
|
|
~r |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
dv |
r |
|
r |
|
||||
|
|
|
|
|
|
|
|
|
+ |
|
|
r |
+ ω |
e |
× v . |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
r |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Поскольку |
r& |
|
r |
|
|
r& |
|
r |
|
|
и |
~r |
|
r |
формулу |
|||||||||
vo |
= wo |
, ωe |
= εe |
|
dr |
/ dt = vr |
||||||||||||||||||
(8.6) перепишем в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
r |
|
|
~r |
r |
|
r |
|
|
|
r |
|
r |
|
|
r |
|
|
r |
r |
|
r |
|
|
|
|
|
dv |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
w |
a |
= |
r |
+ w |
o |
+ ε |
e |
×r |
+ ω |
e |
×(ω |
e |
×r) |
+ 2ω |
e |
×v |
r |
. (8.7) |
||||||
dt |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рассмотрим слагаемые, входящие в правую часть |
||||||||||||||||||||||||
равенства (8.7). |
|
|
|
|
|
~r |
|
|
|
~2 r |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Вектор |
|
|
= |
|
dvr |
= |
|
d r |
|
|
|
|
|
|
(8.8) |
|||||||||
|
|
wr |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
dt |
|
dt2 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
есть по определению относительное ускорение (как локальная производная от относительной скорости по времени). В этом можно убедиться, положив в (8.7) одновременно ωe = 0 , εe = 0 и wo = 0 , т.е. считая оси
Oxyz неподвижными. Тогда полное ускорение wa точки M должно совпасть с относительным wr и мы придем к равенству (8.8).
Векторная величина
we = wo + εe ×r + ωe ×(ωe ×r) |
(8.9) |
есть переносное ускорение, так как, она равна ускорению той неизменно связанной с системой Oxyz точки M′, в которой в данный момент находится точка M . Иным путем это можно получить, положив в (8.7) vr = 0 и wr = 0 , т.е. считая, что точка M неизменно связана с системой Oxyz . Тогда ее полное ускорение wa совпадает с переносным we и мы получим равенство (8.9).
Векторная величина |
|
wk = 2 ωe × vr , |
(8.10) |
которая не входит ни в относительное, ни в переносное ускорения, называется поворотным или кориолисовым ускорением.
В результате получаем следующую теорему о сложении ускорений или теорему Кориолиса: абсолютное ускорение
точки при сложном движении равно геометрической сумме относительного, переносного и кориолисова ускорений
wa = wr + we + wk . |
(8.11) |
Если переносное движение (движение подвижной системы Oxyz ) является поступательным, то wk = 0 ,
так как ωe = 0 , и мы имеем:
wa = wr + we . |
(8.12) |
Следовательно, при поступательном переносном движении абсолютное ускорение точки равно геометрической сумме относительного и переносного ускорений.
Кориолисово ускорение появляется только тогда, когда подвижные оси вращаются (отсюда термин «поворотное» ускорение). Как видно из хода доказательства формулы (8.6), вектор wk является суммой двух векторов ωe × vr .
Один из них учитывает изменение вектора относительной скорости vr , при непоступательном
переносном движении, а другой – изменение переносной скорости ve при относительном перемещении точки (при
изменении вектора r в относительном движении).
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
23 марта 2007 г. |
Кинематика |
Краткий курс Теоретической Механики |
29 |
Если система Oxyz движется поступательно, равномерно и прямолинейно, то ωe = 0 , εe = 0 , wo = 0 , и, как видно из (8.9)-(8.10): we = 0 и wk = 0 , т.е. в этом
случае относительное и абсолютное ускорения совпадают wa = wr .
Отметим, что кориолисово ускорение может обращаться в нуль в данный момент времени, когда в этот момент
r |
r |
времени ωe = 0 , или vr = 0 , или же ωe |
|| vr . |
В тех случаях, когда wk ≠ 0 , его |
модуль, согласно |
(8.10), вычисляется по формуле |
|
wk = 2ωevr sin(α) , |
(8.13) |
где α – угол между векторами ωe и vr , а направление wk определяется направлением произведения ωe × vr .
Направление wk можно еще найти, спроектировав вектор vr на плоскость π, перпендикулярную к ωe , и повернув эту проекцию vrπ на 90° в сторону переносного вращения (правило Жуковского).
Такой способ удобен в случае плоского движения, когда вектор vr уже лежит в плоскости, перпендикулярной к ωe .
ωe |
|
При |
решении |
задач |
|
|
следует иметь в виду, что |
||||
vr α |
|
относительная скорость vr |
|||
|
и относительное |
ускорение |
|||
|
wk |
wr вычисляются обычными |
|||
|
методами кинематики точки; |
||||
90o |
|
при этом подвижная система |
|||
|
отсчета |
Oxyz |
рассматри- |
||
vr π |
π |
вается |
как |
основная |
|
|
|
(неподвижная). |
|
|
|
Переносная |
скорость ve |
и переносное ускорение we |
|||
вычисляются как скорость |
и ускорение той |
точки |
M′ |
||
подвижной системы отсчета |
Oxyz , |
с которой в данный |
|||
момент совпадает движущаяся точка С. Поскольку подвижная система движется как абсолютно твердое тело, то вычисление ve и we производится по формулам
кинематики твердого тела. Наконец, кориолисово ускорение wk вычисляется по формулам (8.10) или (8.13).
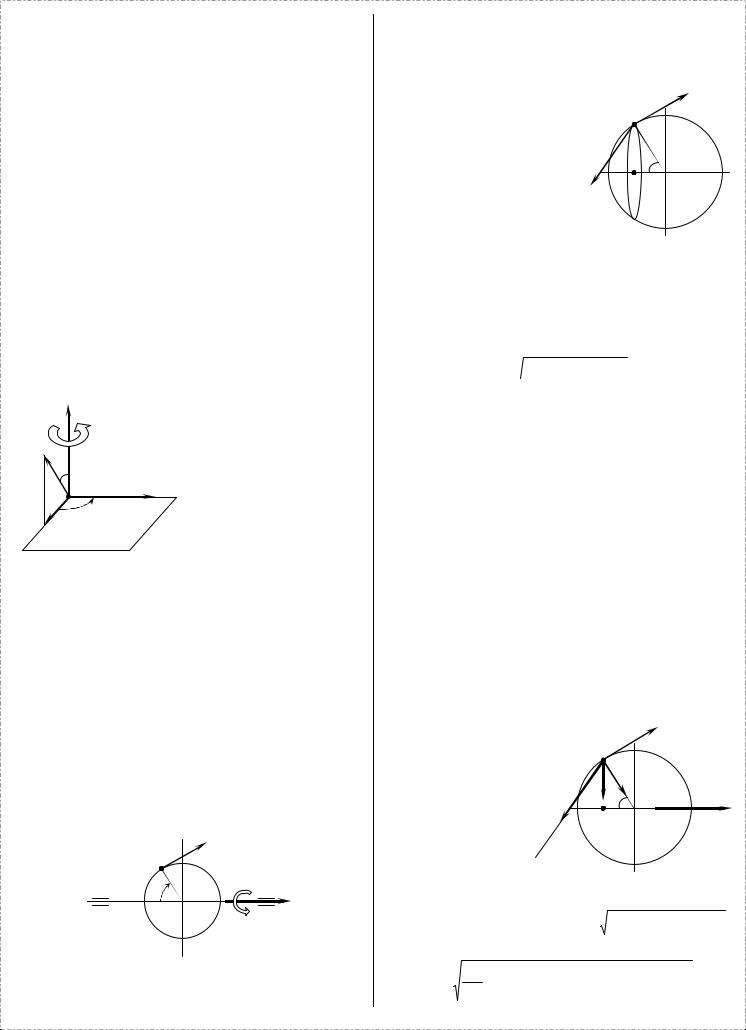
Теоретический пример По ободу диска радиуса R , вращающегося вокруг своего диаметра с постоянной угловой скоростью ω, движется с постоянной по модулю скоростью v точка M . Найти абсолютную скорость и абсолютное ускорение точки M как функцию угла ϕ , составленного радиус-вектором
точки M с осью вращения диска AB .
|
M |
|
v |
|
|
|
|
A |
ϕ |
|
B |
|
|
ω |
|
|
|
O |
|
|
|
|
MO = R
Решение
Движение точки M по ободу диска будет ее относительным движением (vr = v) .
Вращательное движение самого диска вокруг оси AB будет для точки M переносным движением ωe = ω.
При таком переносном движении в данный момент времени точка M будет вместе с соответствующей точкой
диска совершать |
движение по |
|
vr |
окружности |
радиуса |
M |
|
MM′ = R sin ϕ |
с центром |
|
|
M′ на оси вращения AB . |
|
ϕ |
|
Величина |
переносной |
|
|
скорости ve для точки M |
M′ |
O |
|
может быть найдена по формуле |
v |
|
|
Эйлера, т.е. ve = MM′ ωe или |
e |
|
|
ve = ωR sin ϕ. |
|
|
|
Поскольку вектор относительной скорости v точки M лежит в плоскости диска, а переносная скорость ve
перпендикулярна этой плоскости, т.е. ve v , и, поскольку
va = vr + ve , то va2 = vr2 + ve2 = v2 + ω2R2 sin2 ϕ .
Окончательно имеем
vM =  v2 + ω2R2 sin2 ϕ .
v2 + ω2R2 sin2 ϕ .
|
Поскольку относительная скорость vr точки M не |
||||||||
изменяется |
по |
величине, |
то |
относительное |
ускорение |
||||
r |
r |
r |
будет представлено |
только |
нормальной |
||||
w |
= wτ + wn |
||||||||
r |
r |
r |
r |
r |
r |
|
|
|
|
составляющей |
= 0) , |
по отношению к |
|||||||
w |
= wn , |
(wτ |
|||||||
|
|
|
r |
r |
r |
|
|
|
|
траектории относительного движения (окружность с центром в точке O ). Поэтому wr = wrn = v2 R .
R .
Поскольку ω = const , то ω& = ε = 0 , а, следовательно, переносное ускорение wre = wreвр + wreос точки M будет
иметь только осестремительную составляющую wre = wreос ,
(wreвр = 0) , weос = MM′ ω2 = ω2 R sin ϕ.
Ускорение Кориолиса wk = 2 ωe × vr для точки M
будет ортогонально плоскости диска и направлено в соответствии с правилом векторного произведения. На
рисунке это ускорение коллинеарное с вектором |
ve . По |
|||||||||
величине оно равно w = 2ω |
v sin(90o − ϕ) = 2ωv cos ϕ . |
|||||||||
|
|
|
|
k |
e |
|
r |
|
|
|
|
Таким образом |
|
|
|
|
|
|
|||
r |
|
r |
r |
r |
|
|
|
|
vr |
|
w |
M |
= wос + wn |
+ w . |
|
|
|
|
|
||
|
e |
r |
k |
|
|
M |
|
y |
||
|
Спроектируем |
это |
|
|
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
r |
|
|
||||
векторное равенство на |
|
|
|
wn |
|
|
||||
|
|
wос |
r |
|
ω |
|||||
оси Mxyz : |
|
|
|
|
ϕ |
|
||||
|
|
|
|
|
|
|
r |
|
|
|
|
|
= wос |
+ wn sin ϕ, |
wk |
e |
|
|
|
||
w |
Mx |
|
M′ |
O |
|
|||||
|
e |
r |
|
|
|
|
|
|
||
wMy = wrn cos ϕ, |
z |
|
|
|
|
|
||||
wMz = wk . |
|
|
|
|
x |
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
После этого абсолютное |
ускорение точки M может |
||||||||
быть вычислено по формуле: |
wM = |
wMx2 + wMy2 |
+ wMz2 , |
|||||||
или окончательно: |
|
|
|
|
|
|
||||
|
wM = |
v4 |
+ ω4R2 sin2 |
ϕ + 2ω2v2 (1 + cos2 ϕ) . |
||||||
|
|
|
R2 |
|
|
|
|
|
|
|
© Составители: Асланов С.К., Царенко А.П., кафедра Теоретической Механики ОНУ |
23 марта 2007 г. |