

aaa24092012
.pdfF F

S - пройденный телом путь
Рис.12. Пояснения к формуле механической работы
Мощность (N ) – это скалярная физическая величина, характеризующая скорость совершения работы:
N |
A |
, |
(16) |
|
|||
|
t |
|
|
где A- работа, t- время, за которое она была совершена. Мощность измеряется в ваттах (Вт).
Коэффициент полезного действия (КПД) механизма определяется отношением полезной работы к работе совершенной:
|
Aï î ëåçí |
; |
(17) |
|
|||
À ñî âåðø |
|
|
|
КПД измеряется в долях.
Кинетическая энергия (Eêèí ) определяется работой, которую не-
обходимо совершить, чтобы остановить тело массы m , двигающееся со скоростью . Кинетическая энергия, которой обладает движущееся тело, определяется формулой:
|
m 2 |
||
Eêèí |
|
(18) |
|
2 |
|||
|
|||
Кинетическая энергия системы зависит от скоростей тел системы, а скорости, в свою очередь, зависят от выбора системы отсчета. В разных системах отсчета скорости одного и того же тела в один и тот же момент времени могут существенно различаться. Следовательно, кинетиче-
ская энергия – величина относительная.
Потенциальная энергия ( Eï î ò ) – это энергия взаимного распо-
ложения тел или частей одного и того же тела по отношению друг к другу (например, при деформации пружины) и определяемая характером сил взаимодействия между ними. Она численно равна работе, которую
20
совершает тело при изменении своего пространственного положения, например, в поле силы тяжести Земли. Лишено физического смысла утверждение: «потенциальная энергия отдельно взятого тела», поскольку она рассматривается по отношению к другим телам. Потенциальная
энергия, как и кинетическая, есть величина относительная.
Потенциальная энергия тела массы m , поднятого над поверхностью Земли на высоту h:
Eï îò mgh |
. |
(19) |
||
|
|
|||
Потенциальная энергия сжатой пружины: |
|
|||
E |
|
kx2 |
. |
(20) |
|
||||
ï î ò |
2 |
|
|
|
Кинетическая и потенциальная энергии относятся к одной форме энергии – механической и могут взаимно превращаться друг в друга.
Закон сохранения и превращения механической энергии
можно сформулировать следующим образом: полная механическая энер-
гия системы тел, взаимодействующих между собой лишь силами тяготения и упругости, есть величина постоянная. При этом кинетическая энергия может переходить в потенциальную и наоборот (пример: изменение кинетической и потенциальной энергии тела, брошенного вертикально вверх).
В общем случае справедливо следующее определение работы. Ра-
бота - это мера изменения энергии. Единица измерения энергии и работы одинакова – джоуль (Дж).
1.3. Статика. Момент силы
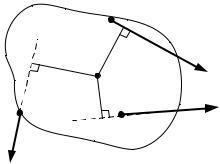
Моментом силы называется физическая величина M , определяемая произведением модуля приложенной к телу силы F на плечо d этой силы относительно данной оси:
M F d . |
(21) |
На рис.13 показаны различные силы и их плечи относительно точки О.
21
|
2 |
|
d3 |
d2 |
F2 |
|
||
|
O |
|
3 |
d1 |
|
|
1 |
F1 |
F3 |
|
|
|
|
Рис. 13. Момент силы
Суммарный момент нескольких сил, действующих на тело, равен алгебраической сумме моментов сил относительно данной оси:
n |
|
M Mi . |
(22) |
i 1 |
|
При этом моменты сил, вращающих тело вокруг данной оси по часовой стрелке и против часовой стрелки, берутся с разными знаками. Например, моменты сил F1 и F3 берутся со знаком «+», а момент силы F2 -
со знаком «-».
Условием равновесия тела, имеющего ось вращения, явля-
ется равенство нулю суммарного момента:
n |
|
Mi 0. |
(23) |
i1
2.МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ И ВОЛНЫ
Колебательным называют процесс, при котором значение какойлибо физической величины периодически меняется со временем.
Если это изменение значения физической величины с течением времени можно описать с помощью тригонометрических функций sin или cos, колебания называются гармоническими.
Механическими колебаниями называется процесс периодического смещения частицы относительно положения равновесия.
22
2.1. Уравнение гармонических колебаний. Характеристики колебаний
Уравнения гармонических колебаний имеют вид: |
|
|
x Asin 0t 0 |
или x Acos 0t 0 , |
(24) |
где x – смещение колеблющейся величины от положения равновесия (измеряется в метрах); A – амплитуда (максимальное смещение от положения равновесия, измеряется в метрах); 0 – циклическая частота (ее физический смысл - это число колебаний за 2 секунд, измеряется в рад/сек):
(25)
T – период колебаний (время одного полного колебания, измеряется в секундах); – частота колебаний (число колебаний в 1 секунду, измеряется в герцах):
|
|
|
|
1 |
; |
(26) |
||
|
|
|||||||
0t 0 |
|
|
T |
|
|
|
||
– фаза колебаний в момент времени t (измеряется в ра- |
||||||||
дианах); |
0 – начальная фаза колебаний (измеряется в радианах). |
|||||||
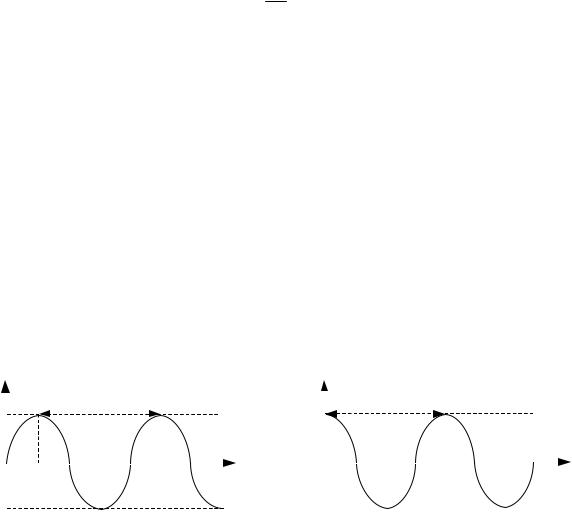
На рис.14 приведены графики гармонических колебаний. |
||||||||
Синус или косинус фазы однозначно определяет смещение x в мо- |
||||||||
мент времени t : sin 0t 0 |
x |
или |
cos 0t 0 |
x |
. |
|||
|
|
|||||||
|
|
A |
|
A |
||||
x |
|
|
|
|
0 |
0 |
x |
|
|
|
|
0 0 |
||
A |
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
T |
|
|
|||
|
|
|
|
|
|
|
|
|
||||||
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
t |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
-A |
|
|
|
|
|
|
|
-A |
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
б) |
|||
|
|
|
|
Рис. 14. Графики гармонических колебаний: |
||||||||||
|
|
|
|
а) x Asin 0t, |
б) x Acos 0t |
|||||||||
23
Фазу можно рассматривать, например, как угол поворота радиуса на часах, на которых радиус делает один полный оборот на угол 2 за
время периода T . Таким образом, четверти периода (T ) соответствует
4
фаза 2, половине периода (T 2) - , трем четвертым периода (3T 4) -
3 |
2 |
и полному периоду T соответствует фаза |
2 . Синус или косинус на- |
|
|
|
чальной фазы однозначно определяют смещение x0 в начальный момент
времени t 0:
x sin 0
0 A
или cos 0 x0 .
A
2.2. Виды колебаний. Пружинный и математический маятники
Различным колебательным движениям присущ общий признак – наличие такого значения (положения в пространстве) физической величины, которое при отсутствии (внешних) причин, вызывающих колебания, может сохраняться неопределенно долгое время. В таком случае говорят о наличии устойчивого положения равновесия.
Для колебательного процесса характерно наличие силы, возвра-
щающей систему в положение устойчивого равновесия при попытках вывести ее из этого положения. В качестве возвращающей силы могут выступать различные силы: силы упругости (колебания пружинного маятника); сила тяжести (колебания маятника, качелей); силы, имеющие электромагнитную природу и т.д.
Замкнутая колебательная система, выведенная из положения равновесия и предоставленная самой себе, совершает незатухающие собственные «свободные» колебания – это идеализированные колебания, не учитывающие сил сопротивления среды и потерь на трение.
Любая реальная замкнутая колебательная система совершает затухающие колебания, поскольку реально существуют силы трения.
При наличии внешней периодически действующей на замкнутую систему силы возникают колебания, называемые вынужденными, они совершаются с частотой внешней вынуждающей силы.
Если существует устройство, с помощью которого система сама контролирует периодическую подпитку энергией извне, компенсирующую работу сил трения, то говорят, что система совершает автоколе-
бания.
24
Колебательная система, совершающая гармонические колебания, называется гармоническим осциллятором. Гармонические осцилляторы рассматриваются во многих задачах классической и квантовой физики. К гармоническим осцилляторам относятся, в частности, пружинный и математический маятники.
Рассмотрим гармонические колебания на примере пружинного маятника.
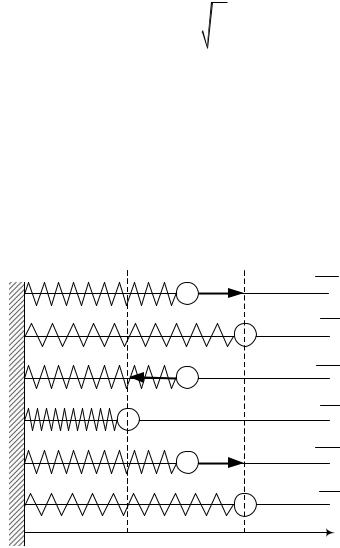
Пружинный маятник
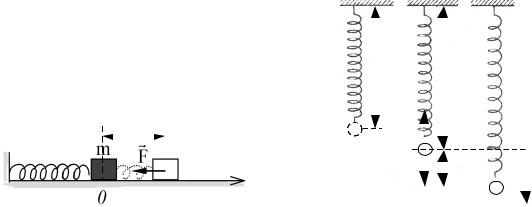
Пружинный маятник представляет собой материальную точку массой m, прикрепленную к абсолютно упругой невесомой пружине с жесткостью k . Различают два наиболее простых случая: горизонтальный (рис.15, а) и вертикальный (рис.15, б) маятники.
а) Горизонтальный маятник (рис. 15,а). При смещении груза m из положения равновесия 0 на величину x на него действует в горизонтальном направлении возвращающая упругая сила F kx (закон Гука).
Предполагается, что горизонтальная опора, по которой скользит груз m при своих колебаниях, абсолютно гладкая (трения нет).
б) Вертикальный маятник (рис.15, б). Положение равновесия в этом случае характеризуется условием:
mg Fo kxo,
где Fo - величина упругой силы, действующей на груз m при статиче-
ском растяжении пружины на xo под действием силы тяжести груза mg .
|
|
|
|
0 |
|
|
|
0 x0 |
||
|
|
|
|
|
|
|
|
|
|
|
m |
|
x |
kx0 |
|
|
|
|
0 |
||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
X |
mg |
X |
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
б |
|
|
|
||||
|
|
а |
|
|
|
|
||||
Рис.15. Пружинный маятник: а – горизонтальный и б – вертикальный
25
Если растянуть пружину и отпустить груз, то он начнет совершать вертикальные колебания. Если смещение в какой-то момент времени будет x, то сила упругости запишется теперь как Fóï ð k x x0 .
В обоих рассмотренных случаях пружинный маятник совершает гармонические колебания с периодом
T 2 |
m |
(27) |
|
k
и циклической частотой
o |
k |
|
(28) |
|
m . |
||||
|
||||
На примере рассмотрения пружинного маятника можно сделать вывод о том, что гармонические колебания – это движение, вызванное силой, возрастающей пропорционально смещению x. Таким образом, если возвращающая сила по виду напоминает закон Гука Fóïð kx (она по-
лучила название квазиупругой силы), то система должна совершать гармонические колебания. В момент прохождения положения равновесия на тело не действует возвращающая сила, однако, тело по инерции проскакивает положение равновесия и возвращающая сила меняет направление на противоположное.
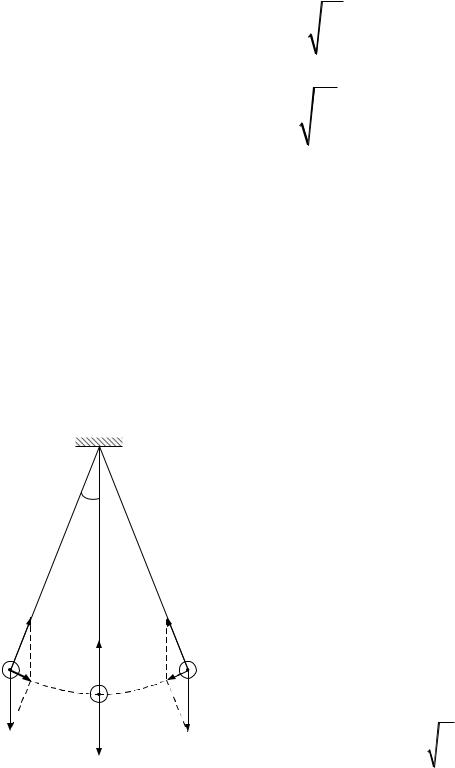
Математический маятник
F |
F |
упр |
упр |
|
F |
|
упр |
F |
F |
mg |
mg |
|
mg |
Математический маятник пред-
ставляет собой идеализированную систему в виде материальной точки, подвешенной на невесомой нерастяжимой нити длиной l , которая совершает малые колебания под действием силы тяжести (рис. 16).
Колебания такого маятника при малых углах отклонения (не превышающих 5º) можно считать гармоническими, и циклическая частота математического маятника:
|
g |
, |
(29) |
|
|||
o |
l |
|
|
Рис.16. Математический маятник
26
а период:
T 2 |
l |
. |
(30) |
|
 g
g
2.3. Энергия тела при гармонических колебаниях
Энергия, сообщенная колебательной системе при начальном толчке, будет периодически преобразовываться: потенциальная энергия деформированной пружины будет переходить в кинетическую энергию движущегося груза и обратно.
Пусть пружинный маятник совершает гармонические колебания с начальной фазой 0 0, т.е. x Asin t (рис.17).
|
m |
|
Eкинmax |
|
m 2 |
|
|
o |
|||
|
|
o |
|
|
2 |
|
|
|
Eпотmax kA2 |
||
|
|
|
|
|
2 |
|
|
|
Eкинmax |
|
m o2 |
|
o |
|
2 |
||
|
|
|
|
|
|
|
|
|
Eпотmax kA2 |
||
|
|
|
|
|
2 |
|
|
|
Eкинmax |
m o2 |
|
|
|
o |
|
|
2 |
|
|
|
Eпотmax kA2 |
||
|
|
|
|
|
2 |
-A |
0 |
A |
|
|
x |
Рис.17. Закон сохранения механической энергии при колебаниях пружинного маятника
При максимальном отклонении груза от положения равновесия полная механическая энергия маятника (энергия деформированной пру-
жины с жесткостью |
k |
) равна |
Eïîò max |
kA2 |
. При прохождении положения |
|
2 |
||||||
|
|
|
равновесия (x 0) потенциальная энергия пружины станет равной нулю, и полная механическая энергия колебательной системы определится как
E |
|
m 02 |
. |
|
|||
êèí max |
2 |
|
|
На рис.18 представлены графики зависимостей кинетической, потенциальной и полной энергии в случаях, когда гармонические колеба-
27
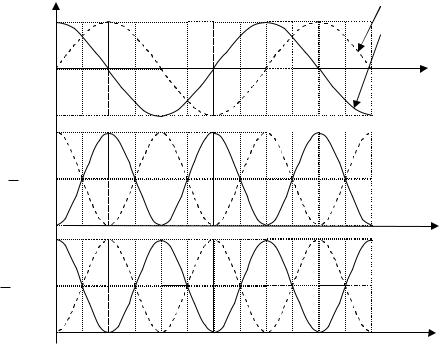
ния описываются тригонометрическими функциями синуса (пунктирная линия) или косинуса (сплошная линия).
|
x |
x Asin ω0 |
|
A |
|
|
x Acosω0 |
|
|
|
|
|
0 |
t |
|
–A |
|
|
|
|
Eкин |
Eполн |
|
1 Eполн |
|
|
2 |
|
|
|
0 |
|
Eпот |
t |
|
1 E |
|
Eполн |
полн |
|
|
2 |
|
|
|
0 |
t |
Рис.18. Графики временной зависимости кинетической и потенциальной энергии при гармонических колебаниях
Из графиков (рис.18) следует, что частота изменения кинети-
ческой и потенциальной энергии в два раза выше собственной частоты гармонических колебаний.
3.ОСНОВЫ МОЛЕКУЛЯРНО-КИНЕТИЧЕСКОЙ ТЕОРИИ
3.1.Основные положения молекулярно-кинетической теории (МКТ)
1.Вещество состоит из молекул (атомов). Молекулы (атомы) находятся на определенном расстоянии друг от друга. Доказательством этого является возможность сжатия веществ, при котором молекулы сближаются.
2.Молекулы (атомы) находятся в непрерывном беспорядочном движении. Доказательствами этого являются: диффузия – явление пе-
реноса массы вещества хаотически движущимися молекулами (распро-
28
странение запахов, растворение, испарение жидкостей и т.п.), а также броуновское движение.
Броуновским движением называют наблюдаемое с помощью микроскопа непрерывное хаотическое движение в жидкости или газе взвешенных частиц.
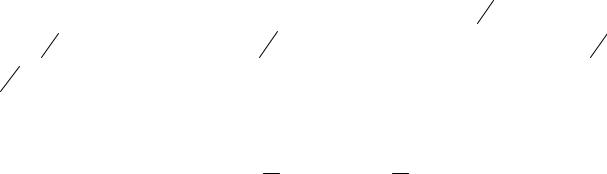
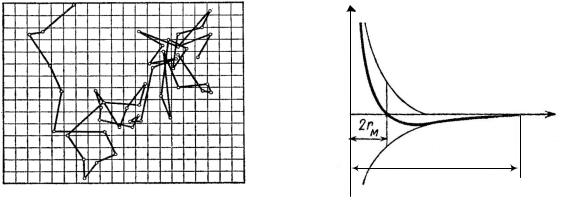
В силу хаотичности теплового движения молекул жидкости или газа броуновская частица в любой момент времени испытывает их неуравновешенное воздействие, непрерывно изменяющееся по величине и направлению. В результате частица находится в беспорядочном движении и перемещается по отрезкам сложной ломаной линии (см. рис.19).
FОТ
0
r
r0
FПР 
Рис. 19. Броуновское движение |
Рис. 20. Силы молекулярного взаимодействия |
3. Молекулы связаны друг с другом силами молекулярного взаимодействия – притяжения и отталкивания. На рис.20 представлены силы отталкивания и притяжения и их равнодействующая (жирная кривая). Эти силы зависят от расстояния r между молекулами. На малых расстояниях силы отталкивания FÎ Ò больше сил притяжения FÏ Ð. Удво-
енный радиус молекулы (2rÌ ) - расстояние между центрами молекул,
при уменьшении которого начинают преобладать силы отталкивания; r0
– радиус молекулярного действия (наибольшее расстояние, на котором молекулы еще действуют друг на друга).
4. Каждая движущаяся молекула обладает кинетической энергией. Молекулы вещества связаны между собой молекулярными силами, следовательно, образуют систему, обладающую и потенциальной энергией.
29