

2 Краткое описание кинематической схемы исполнительного механизма
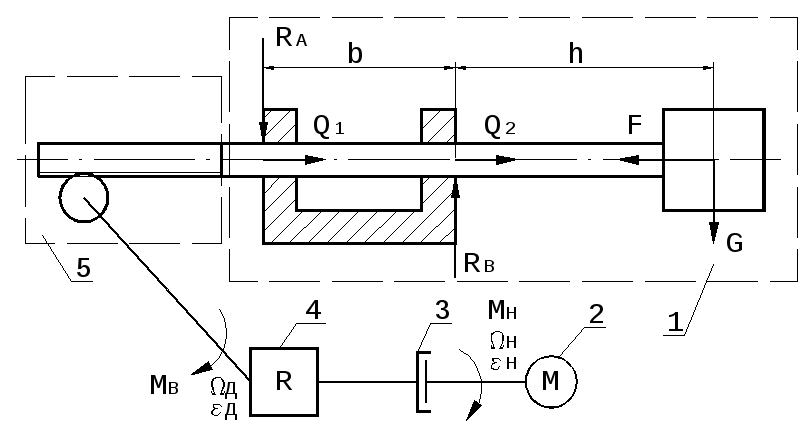
Рисунок 1 – Кинематическая схема привода исполнительного механизма
1 – исполнительный механизм (конструкция направляющих перемещения)
2 – исполнительный двигатель
3 - муфта
4 - редуктор
5 – реечная пара
Движение на исполнительный механизм подается через механизм муфт, редуктор, необходимый для получения требуемой частоты вращения и реечную пару, преобразующую вращательное движение в поступательное
3 Расчет сил трения и силового заклинивания в направляющих поступательного движения исполнительного механизма
При расчете привода следует учитывать силы сопротивления движению исполнительного механизма. Величина сил трения зависит от величин нормальных реакций в опорах, определяемых весом подвижных частей, схемой приложения внешних сил и конструкцией направляющих.
Значение силы трения определяется по формуле
![]() ,
(1)
,
(1)
где Fi – сила трения в i - ой опоре, n - число опор, F∑ - сумма модулей нормальных реакций в опорах, µ - коэффициент трения скольжения или качения.
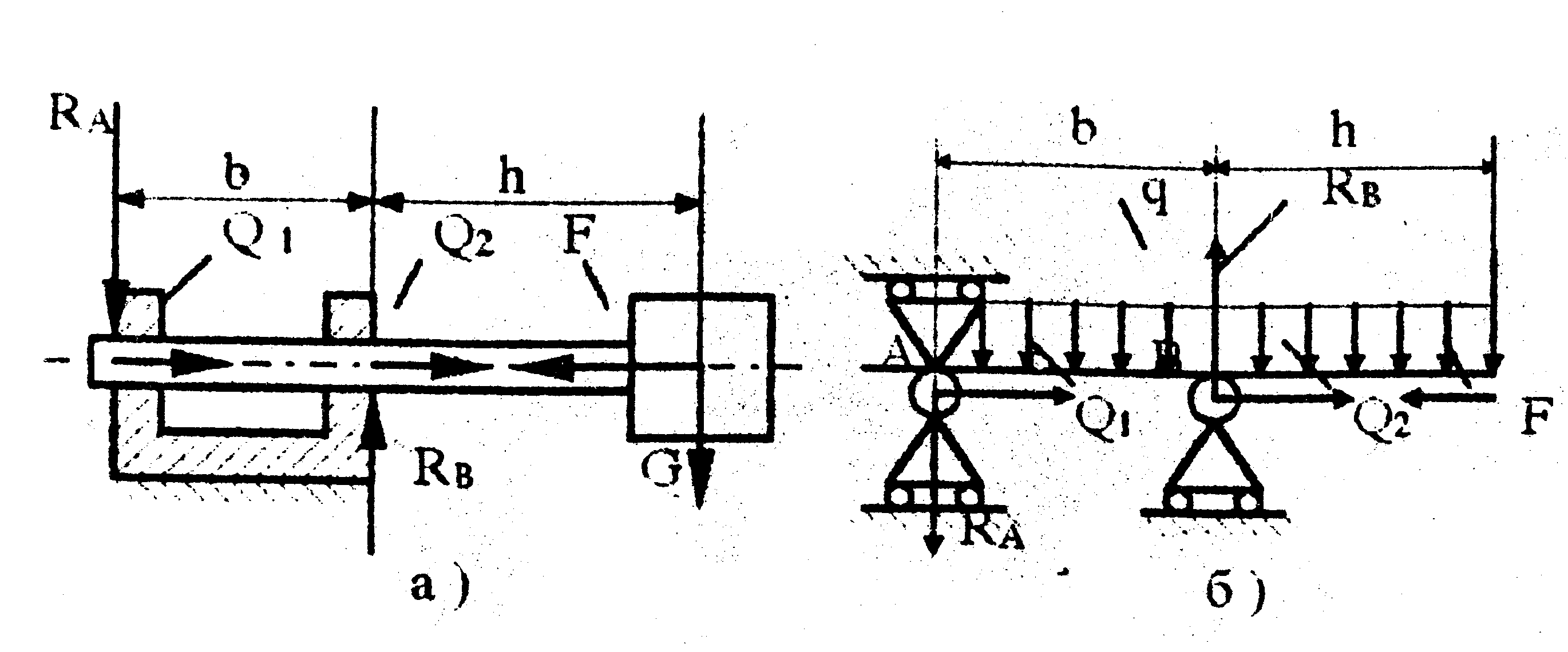
Рисунок 2 – Конструкция направляющих используемая в механизме радиального перемещения робота
Уравнение равновесия исполнительного органа можно записать в виде
![]() ,
(2)
,
(2)
![]() ,
,
где G – вес исполнительного органа с объектом манипулирования т.е. вес схвата плюс вес заготовки (детали);G=1020,24;
q – распределенная нагрузка, создаваемая весом G1 направляющей;
G1= 559,17; q=448,05;
RA и RB реакции в соответствующих опорах А и В.
Из уравнений равновесия можно определить реакции в опорах
![]() .
(3)
.
(3)
![]() H.
H.
![]() .
(4)
.
(4)
![]() H.
H.
Условие отсутствия заклинивания для приводов радиального перемещения имеет вид
![]() ,
(5)
,
(5)
где FT = (RA+RB)*µ; FT = (4054,2+5626,7)*0.18=1742,562 H.
F>1764,562 H.
Если принять tgα=G/FT ; tgα=0.58; β=h/b ; β=3.33; k=G1/G ; k=0.54, F=1765, условие заклинивания запишется выражением
![]() .
(6)
.
(6)
![]()
При соответствующем конструктивном исполнении направляющей весом G1 последним можно пренебречь, если G1 << G, то к=0 и формула (6) принимает вид
![]() .
(7)
.
(7)
![]() .
.
Анализ формул (6) и (7) показывает, что наличие или отсутствие заклинивания зависит от:
- отношения весов подвижных частей исполнительного механизма;
- внешней нагрузки;
- конструктивных параметров b и h.
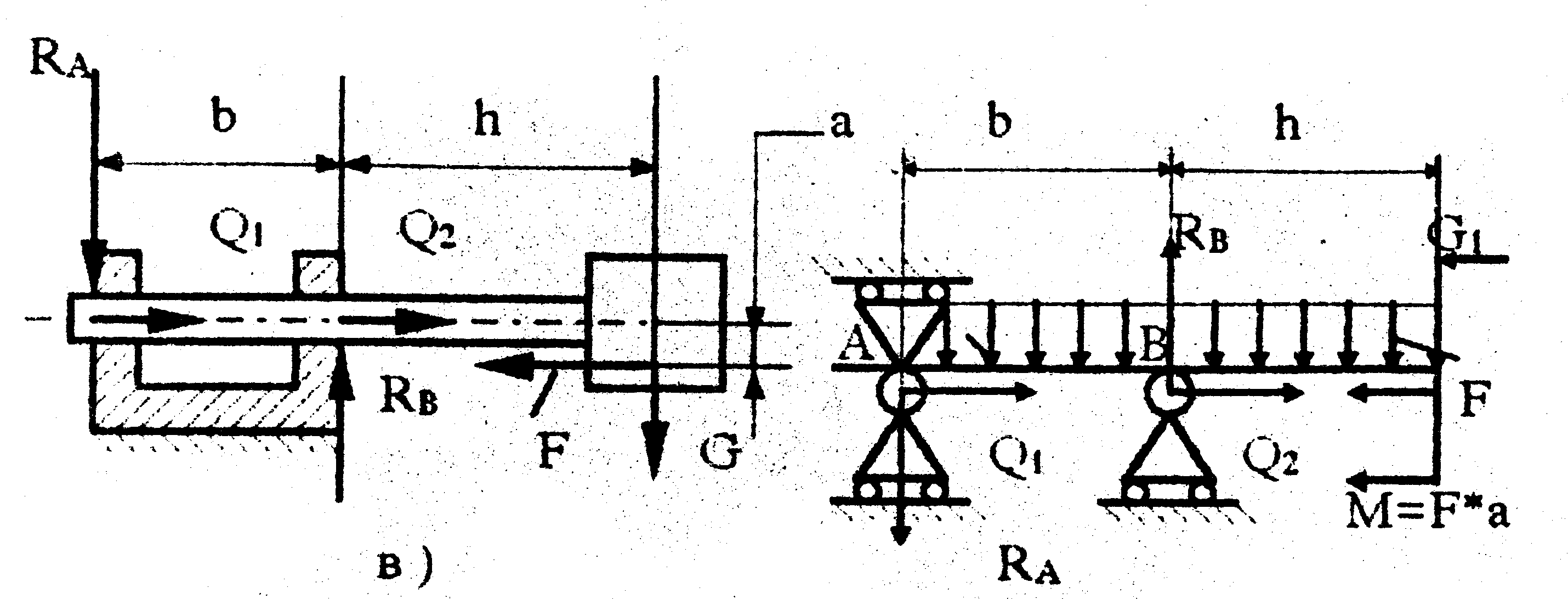
Рисунок 3 - Конструкция направляющих используемая в механизме радиального перемещения робота при приложении внешнего усилия к исполнительному органу
Если внешнее усилие F приложено к исполнительному органу на расстоянии а от оси направляющей и действует параллельно оси, как показано на рисунке 2, то решение уравнений равновесия относительно реакций позволяет записать
![]() . (8)
. (8)
![]() . (9)
. (9)