

РГР Механика
.pdf
|
|
|
|
|
|
|
|
|
|
|
d |
|
d 2r |
. |
(11) |
||
a = lim |
t |
|
|
|||||
dt |
dt 2 |
|||||||
t 0 |
|
|
|
|
Таким образом, ускорение есть векторная величина, определяемая первой производной скорости по времени.
На основе выражения (10) можно получить единицу измерения ускорения:
|
|
|
|
м |
|
м |
|
|
a |
|
|
|
. |
||||
t |
|
с с |
|
|||||
|
|
|
с2 |
|||||
Вектор изменения скорости |
|
|
|
|
можно разложить на две |
|||
|
|
|
||||||
составляющие (рис. 3), одна из которых определяет изменение скорости по
модулю ( ), а вторая показывает, как изменяется скорость по направлению
|
|
|
|
|
|
|
|
|
( n ). Отношения изменений скоростей к промежутку времени определяют: |
||||||||
тангенциальное ускорение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
a |
lim |
|
lim |
|
|
|
(12) |
|
t |
t |
dt |
||||||
|
t 0 |
t 0 |
|
|
||||
и нормальное ускорение
a |
|
lim |
|
n |
2 |
n |
|
. |
|||
|
t 0 |
t |
r |
||
|
|
||||
Полное ускорение в векторном виде оказывается равным:
|
|
|
|
|
|
|
d |
|
|
2 |
|
|
|
|
|
||
a |
a |
an |
|
|
|
|
n |
, |
|
|
|
||||||
dt |
r |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
а его модуль: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
d 2 |
|
2 |
2 |
|||
|
|
|
2 |
|
2 |
|
|
||||||||||
|
|
|
|
||||||||||||||
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
a |
an |
|
|
|
|
. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
r |
|
||
(13)
(14)
(15)
В зависимости от величин, входящих в формулу (15), можно провести классификацию движения:
1) a 0 и an 0 – равномерное прямолинейное движение. В этом случае выражение (9) принимает вид: s t ;
10
2) a const a , an 0 – прямолинейное равнопеременное движение.
Для такого вида движения
|
|
a a |
2 1 , |
|
|
||
|
|
|
t |
t2 t1 |
|
|
|
|
|
|
|
|
|||
или, принимая t1 0, t2 t, 1 |
0, 2 , получим: |
|
|
||||
|
|
0 a t . |
|
(16) |
|||
|
|
|
|
|
|
s |
t |
Тогда, учитывая, |
что |
пройденный |
путь: ds dt , и |
ds dt , |
|||
|
|
|
|
|
|
s0 |
t0 |
найдем: |
|
|
|
|
|
|
|
s s0 |
0 |
t t0 |
a t t0 2 |
|
|
||
|
|
; |
|
(17) |
|||
|
2 |
|
|||||
|
|
|
|
|
|
|
|
3)a f t , an 0 – неравномерное прямолинейное движение;
4)a 0, an const – равномерное движение по окружности;
5)a 0, an 0 – равномерное криволинейное движение;
6)a const , an 0 – криволинейное равнопеременное движение;
7)a f t , an 0 – криволинейное движение с переменным ускорением.
Динамика поступательного движения тел
Основные понятия и законы динамики
Кинематика устанавливает законы движения материальной точки, но не указывает причины этого движения. Изучением таких причин занимается
динамика.
В основе динамики лежат фундаментальные законы Ньютона, с
помощью которых можно выяснить, почему тела движутся и как они взаимодействуют друг с другом.
Первый закон Ньютона: существуют такие системы отсчета, в
которых всякое тело сохраняет состояние покоя или равномерного
прямолинейного движения до тех пор, пока воздействия со стороны
11

других тел не заставят его изменить это состояние. Такое свойство
тела сохранять данное состояние движения называют инертностью.
При взаимодействии тел изменение их скорости зависит от массы,
которая является мерой инертности тела. Скорости тел, обладающих большей массой, под воздействием со стороны других тел, меняются в меньшей степени, чем менее массивные. Масса тела определяется его объемом и плотностью:
m V , |
(26) |
где – это масса единицы объема тела.
В системе СИ масса измеряется в килограммах (кг).
Для определения степени воздействий тел друг на друга вводится
понятие силы. Сила – векторная величина, определяющая количественную меру взаимодействия тел, во время которого они получают ускорение. Если на тело одновременно действует несколько сил, то их воздействие определяется равнодействующей силой, т.е. векторной суммой всех приложенных к телу сил. Сила характеризуется величиной, направлением и точкой приложения.
При взаимодействии тел разной массы большее ускорение приобретает самое легкое, а самое массивное движется с минимальным ускорением, т.е. ускорение обратно пропорционально массе тел. В случае,
когда на одно и то же тело поочередно действуют разные силы, ускорение
прямо пропорционально величине силы. Таким образом,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
||
|
|
|
|
|
|
a |
|
. |
|
|
|
(27) |
|
|
|
|
|
|
|
m |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В случае поступательного движения |
|
d |
, поэтому можно записать: |
||||||||
|
|
a |
|
||||||||||
|
|
dt |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
m |
d |
F или |
d m |
|
F . |
|
|
|
|
|
|
|
|
dt |
dt |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
Произведение |
m называют импульсом тела или количеством |
||||||||||
движения, т.е. импульс тела – это векторная физическая величина, численно
12

равная произведению массы тела на его скорость и совпадающая по направлению с вектором скорости:
|
|
|
(28) |
|
p m . |
||||
Таким образом, выражение (27) примет вид: |
|
|||
|
|
|
|
|
|
dp |
|
|
|
|
|
F . |
(29) |
|
|
dt |
|||
|
|
|
|
|
Формула (29) отображает второй |
закон Ньютона: |
скорость |
||
изменения импульса тела определяется равнодействующей всех приложенных к нему сил.
Взаимодействие двух тел описывается третьим законом Ньютона:
силы, с которыми взаимодействуют два тела, равны по модулю,
противоположны по направлению и направлены вдоль прямой,
соединяющей эти тела, т.е.
|
|
|
F12 |
F21. |
(30) |
Все законы Ньютона справедливы только для инерциальных систем
отсчета.
Динамика системы материальных точек. Закон сохранения импульса
Третий закон Ньютона позволяет перейти от динамики отдельной материальной точки к системе материальных точек.
Совокупность материальных точек (тел), рассматриваемых как единое целое, называют механической системой. При этом силы взаимодействия между телами системы называют внутренними, а силы, с
которыми на систему действуют окружающие ее тела, – внешними.
Механическая система, на которую не действуют внешние силы (тела),
называется замкнутой (изолированной).
Для каждого тела системы можно записать второй закон Ньютона:
d dt (mi i ) Fi Fi ,
13
где Fi – равнодействующая всех внутренних сил, действующих на данную точку;
Fi – равнодействующая всех внешних сил, действующих на данную точку.
Согласно третьему закону Ньютона геометрическая сумма всех внутренних сил равна нулю, следовательно, для всей системы в целом получим:
|
|
d |
|
n |
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
m |
|
|
F . |
|
|||
|
|
|
|
|
|||||||||
|
|
dt |
|
|
i |
i |
|
|
i |
|
|||
|
|
i 1 |
|
|
|
|
i 1 |
|
|||||
n |
|
|
|
|
|
|
|
|
|
|
|
||
Так как mi i является импульсом механической системы, можно |
|||||||||||||
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
записать: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
dp |
|
|
|
|
||
|
|
|
|
|
|
|
|
Fi . |
|
|
|||
|
|
|
|
|
|
|
dt |
|
|
|
|||
|
|
|
|
|
|
|
|
i 1 |
|
|
|
||
Если же рассматриваемая механическая система замкнута, то |
|||||||||||||
производная импульса будет равна нулю, а это означает, что: |
|
||||||||||||
|
|
|
|
|
n |
|
|
|
const . |
|
|||
|
|
p mi i |
(31) |
||||||||||
i 1
Формула (31) является математическим выражением одного из фундаментальных законов – закона сохранения импульса: импульс замкнутой системы не изменяется с течением времени. Данный закон будет выполняться и для любой системы, если геометрическая сумма всех внешних сил окажется равной нулю.
Закон сохранения импульса для двух материальных точек будет иметь
вид:
|
m2 |
|
|
m1 1 |
2 |
const . |
Тогда скорость, как производная радиус-вектора
m |
dr1 |
m |
|
|
dr2 |
const . |
|
2 |
|
||||
1 |
dt |
|
|
dt |
|
|
|
|
|
|
|
14

Так как масса тела постоянна, то
dtd m1 r1 m2 r2 const .
Разделив обе части полученного уравнения на сумму масс, получим:
|
|
|
|
|
|
|
|
|
|
|
|
d |
r1 m2 |
|
|
const |
|
|
|
|
|||
m1 |
r2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
const |
. |
(32) |
dt |
|
m m |
|
m m |
2 |
||||||
|
|
1 2 |
|
|
1 |
|
|
|
|||
Выражение в скобках представляет собой распределение массы системы материальных точек. Отсюда следует, что центр инерции (центр масс) – это воображаемая точка, положение которой характеризует распределение массы системы, а радиус-вектор определяется как
|
|
mi ri |
|
|
|
|
|
n |
|
|
|
r |
|
i 1 |
. |
(33) |
|
n |
|||||
c |
|
|
|
||
|
|
mi |
|
|
i 1
Уравнение (32) позволяет сделать вывод, что центр масс движется с постоянной скоростью:
|
|
dr |
|
|
|
|||
|
|
|
|
c |
. |
|
|
|
c |
|
|
|
|
|
|||
|
|
dt |
|
|
|
|||
|
|
|
|
|
|
|||
В этом случае |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(m1 m2 ) c m1 |
1 |
m2 2 |
p1 |
p2 |
, |
|||
т.е. импульс системы равен сумме импульсов тел, составляющих данную систему. Другими словами, импульс – величина аддитивная.
Второй закон Ньютона для центра инерции системы можно представить
в виде:
m d c dt
n |
|
Fi . |
(34) |
i 1
Выражение (34) представляет собой закон движения центра масс:
центр масс системы движется как материальная точка, масса которой равна суммарной массе системы, под действием силы, равной геометрической сумме всех внешних сил.
15
Из закона сохранения импульса вытекает, что центр масс замкнутой системы либо движется равномерно и прямолинейно, либо остается неподвижным.
Сила трения
Все тела подвержены действию сил со стороны других тел. Природа этих сил имеет разный характер. Силы, возникающие в результате движения,
носят название сил трения. Они препятствуют относительному перемещению соприкасающихся тел и зависят от их относительных скоростей. В результате действия сил трения всегда происходит нагревание соприкасающихся поверхностей.
Внешнее (сухое) трение возникает в плоскости касания двух тел при их относительном перемещении. Если тела неподвижны друг относительно друга, то говорят о трении покоя; для движущихся тел различают трение
скольжения, качения, вращения.
Внешнее трение обусловливается шероховатостью соприкасающихся поверхностей или силами межмолекулярного взаимодействия (для очень гладких поверхностей). Экспериментальным путем было установлено несколько законов внешнего трения.
Для трения скольжения шероховатых поверхностей:
Fтр N , |
(38) |
где µ – коэффициент трения скольжения, зависящий от свойств соприкасающихся поверхностей.
Для трения скольжения гладких поверхностей:
Fтр ист N S p0 , |
(39) |
где ист – истинный коэффициент трения скольжения;
S – площадь контакта;
p0 – давление, обусловленное силами межмолекулярного взаимодействия.
Для трения качения:
16
F |
|
|
|
N |
, |
(40) |
к |
|
|||||
тр |
|
|
r |
|
|
|
|
|
|
|
|
|
где к – коэффициент трения качения; r – радиус катящегося тела.
Для уменьшения сил внешнего трения используют либо смазку (трение скольжения), либо заменяют трение скольжения трением качения.
Внутреннее трение возникает между движущимися частями одной и той же среды (слои жидкости или газа).
Внутреннее трение,
обусловленное перемещением слоев жидкости или газа, иногда называют
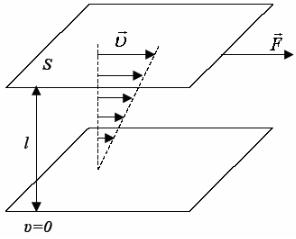
вязкостью. Для введения количественной характеристики вязкости рассмотрим следующую модель (рис. 4).
Между двумя плоскими твердыми пластинами (одна неподвижная внизу и вторая подвижная – сверху) имеется жидкость. Под
действием касательной силы верхняя пластина начинает двигаться, при этом слои жидкости тоже приходят в движение – верхние со скоростью, близкой к скорости пластины, нижние – с меньшей скоростью.
Вследствие «прилипания» молекул жидкости к пластине на ней образуется пограничный слой жидкости, в результате чего молекулы пластины не участвуют в процессе трения. Таким образом, трение возникает только между слоями жидкости. При этом сила трения
|
|
|
|
||
S |
d |
. |
(41) |
||
F |
|||||
|
|||||
|
|
dl |
|
||
где – коэффициент вязкости жидкости (динамическая вязкость);
S – площадь пластины;
17

d – градиент скорости, показывающий, как быстро изменяется скорость dl
при переходе от слоя к слою в направлении, перпендикулярном движению слоев.
Уравнение (41) называется законом Ньютона для внутреннего
трения.
В системе СИ единицей измерения коэффициента динамической
вязкости является 1 Па с |
|
Н с |
|
||
1 |
|
|
|
, т.е. коэффициент динамической вязкости |
|
|
2 |
||||
|
|
м |
|
|
|
такой жидкости, в которой 1 м2 поверхности слоя испытывает силу 1 Н при
градиенте скорости 1 м / с .
м
Механическая энергия
Потенциальная энергия. Потенциальная энергия характеризует взаимодействие тел и зависит от их взаимного расположения. Данной энергией тело может обладать только в случае действия консервативных сил.
Примером такой силы является гравитационная, т.е. сила тяжести,
действующая в гравитационном поле.
Пусть тело массы m находится в поле тяготения Земли. Определим работу, которую совершает сила тяжести при свободном падении
(перемещение тела изменяется от r1 до r2).
Сила тяготения является переменной силой, так как ее величина зависит от расстояния:
F G |
m M З |
, |
(42) |
т |
r 2 |
|
|
где r – расстояние от центра Земли до тела массы m ; |
|
M З – масса Земли;
G – гравитационная постоянная.
Тогда элементарная работа на участке dr будет равна:
18
|
|
|
|
|
dA F dr G |
m M З |
dr . |
|
|
|
|
(43) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
r 2 |
|
|
|
|
|
|
|
|
|
Полную работу при перемещении тела от r1 до r2 |
можно рассчитать, |
|||||||||||||||||||
интегрируя данное уравнение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
r2 |
|
|
|
|
|
|
|
G m M |
|
|
G m M |
|
|
||||||
|
|
|
dr |
|
|
1 |
r2 |
|
З |
|
З |
|
||||||||
A |
|
G m M |
|
|
G m M |
|
|
|
|
|
|
|
|
|
|
|
. (44) |
|||
З r 2 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
З |
r |
r |
|
|
|
r |
|
|
|
r |
|
|
|||||
|
r |
|
|
|
|
|
|
1 |
|
1 |
|
|
2 |
|
|
|||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
G m M З |
|
|
|
|
||
В полученной |
|
формуле |
величина |
|
|
|
называется |
|||||||||||||
|
|
|
r |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
потенциальной энергией тела в гравитационном поле Земли и обозначается как WП (можно встретить также обозначения EП , П ). Тогда
A WП1 WП 2 . |
(45) |
||
Таким образом, работа в поле силы тяжести совершается за счет |
|||
уменьшения потенциальной энергии тела. |
|
|
|
Чаще всего потенциальную энергию тела, находящегося в |
|||
гравитационном поле Земли, определяют из уравнения: |
|
||
WП m g h . |
(46) |
||
Для упруго деформированной пружины потенциальная энергия будет |
|||
равна: |
|
|
|
W |
k x2 |
|
|
|
. |
(47) |
|
|
|||
П |
2 |
|
|
|
|
|
|
Кинетическая энергия. Под воздействием некоторой силы F,
приложенной к телу, оно получает ускорение. При этом совершается работа:
dA F dl F dl cos .
С учетом второго закона Ньютона ( F m a ) dA m a dl cos .
Так как направление силы совпадает с направлением ускорения, то работа будет равна:
dA m |
d |
dl m |
dl |
d m d . |
|
dt |
dt |
||||
|
|
|
А полная работа на всем пути:
19