

Никитин, Бойко - Методы и средства измерений, испытаний и контроля - 2004
.pdfсигналов изменяются во времени, называют динамическими (нестационарными или неравновесными).
Практически все измерительного устройства имеют в своем составе инерционные элементы, а именно: подвижные механические узлы, электрические и пневматические емкости, индуктивности, элементы, обладающие тепловой инерцией и т.д. Наличие инерционных элементов определяет инерционность всего измерительного устройства. Это приводит к тому, что в динамическом режиме мгновенное значение выходного сигнала измерительного устройства зависит не только от мгновенного значения входного сигнала, но и от любых изменений этого сигнала, т.е. от его первой и второй производных и производных более высокого порядка. Указанные инерционные свойства измерительных устройств определяются динамической характеристикой.
Динамическая характеристика измерительного устройства в общем случае это зависимость между информационными параметрами выходного и входного сигналов и временем или зависимость выходного сигнала от входного в динамическом режиме.
Динамическую характеристику измерительного устройства принято описывать дифференциальным уравнением, передаточной или комплексной частотной функциями.
В подавляющем большинстве случаев динамическая характеристика измерительных устройств в линейной части статической характеристики (для измерительных устройств с линейной статической характеристикой во всем диапазоне преобразований) может быть описана дифференциальным уравнением (10.6) /8/
a |
|
d nY (τ) |
+ a |
|
d n−1Y (τ) |
+... + a |
dY (τ) |
+Y (τ) = KX (τ) |
, (10.6) |
|
n |
dτ n |
n−1 dτ n−1 |
dτ |
|||||||
|
|
1 |
|
|||||||
или соответствующей передаточной функцией (10.7) или (10.8) /8/
W (P) |
|
|
|
|
K |
|
|
|
|
|
|
|
, |
(10.7) |
|
a |
n |
pn + a |
n−1 |
pn−1 +... + a p +1 |
|||
|
|
|
1 |
|
|
||
либо
Y (P) = W (P) X (P) , |
(10.8) |
где Y(p) и X(p) - выходной и входной сигналы измерительного устройства как функции времени;
n - число, определяющее порядок производной.
Передаточную функцию W(p) из формулы (10.7) можно рассматривать как коэффициент преобразования измерительного устройства в динамическом режиме. Передаточная функция, как и дифференциальное уравнение, является исчерпывающей характеристикой инерционных свойств измерительного устройства. Она позволяет определять реакцию измерительного устройства на входные сигналы, изменяющиеся во времени по любому закону. Передаточную функцию измерительных устройств удобно использовать при анализе работы последних в автоматических системах регулирования. Ее определяют обычно через переходную или временную характеристику, которая определяется как изменение во времени выходного сигнала h (t) измерительного устройства при подаче на его вход скачкообразного сигнала, равного по значению единице входной величины.
Если высота скачкообразного входного сигнала не равна единице, а имеет некоторое значение ХА, то по переходной характеристике можно определить выходной сигнал, используя выражение (10.9) /8/
Y (τ) = h(τ) X A , |
(10.9) |
Для определения инерционных свойств измерительных устройств по переходным характеристикам обычно используют заимствованное из теории автоматического регулирования понятие динамического звена. Переходные характеристики и передаточные функции типовых динамических звеньев известны, что позволяют по форме переходной характеристики измерительного устройства отождествить его с каким-либо типовым динамическим звеном, а, следовательно, определить форму передаточной функции используемого измерительного устройства. Описанную процедуру принято называть идентификацией.
На нижеприведенном рисунке 10.6 показаны типичные для измерительных устройств формы переходных процессов, или кривые разгона.
Для получения этих процессов, в нулевой (для простоты) момент времени, входной сигнал измерительного устройства скачком изменяется на величину Ха от некоторого значения Х1 до Х2, как на рисунке 10.6 а. По окончании переходного процесса выходной сигнал измерительного устройства изменяется на величину Yа от значения Y1 до Y2. Для определения коэффициента преобразования К измерительного устройства достаточно вычислить отношение Ya/Xa. Переходные процессы, показанные на рисунке 10.6 б, 10.6 в, 10.6 г, соответствуют типовым усилительному (безнерционному), апереодическому первого порядка и колебательному звеньям /8/.
Процесс, представленный на рисунке 10.6 б, характерен для электронных измерительных устройств, а процессы, представленные на рисунке 10.6 в и 10.6 г - для большого числа измерительных устройств, основанных на прямом преобразовании. Кривая на рисунке 10.6 в) представляет собой экспоненту, а величина Т (подкасательная) называется постоянной времени. Она определяет собой время, за которое выходной сигнал достиг бы
нового установившегося значения, если бы изменялся с постоянной скоростью, равной скорости в момент скачкообразного изменения входного сигнала.
Постоянная времени используется для характеристики динамических свойств измерительных устройств. Проведение касательной и кривой переходного процесса сопряжено с погрешностями, поэтому значения постоянной времени определяют как интервал времени, за который выходной сигнал изменяется на 0,632 от своего приращения Ya на рисунке 10.6 в. Корректность такого определения легко доказывается математически, но мы этого сейчас делать не будем, так как курс лекций очень сокращен. Колебательное динамическое звено, а следовательно, и измерительное устройство, в котором имеет место переходный процесс, показанный на рисунке 10.6 г, можно рассматривать как соединение двух апериодических звеньев с постоянными времени Т1 и Т2. При этом в зависимости от соотношений Т1иТ2, переходный процесс будет различен. Если (Т1/Т2) < 2, то он имеет форму кривых 1 и 2, а при (Т1/Т2) > 2 - форму кривой 3 на рисунке 10.6 г. Переходные процессы, показанные на рисунках 10.6 д и 10.6 е, характерны для случаев, когда дифференциальное уравнение, описывающее динамику измерительного устройства, имеет порядок более чем второй. В этих случаях принято рассматривать измерительное устройство как совокупность нескольких, соединенных последовательно типовых динамических звеньев. Например, измерительное устройство с переходным процессом, показанным на рисунке 10.6 д, можно рассматривать как соединение звена чистого запаздывания со временем запаздывания tз и апериодического звена с постоянной времени Т (для графического определения значений tз и Т достаточно провести касательную к точке А на рисунке 10.6 д. Измерительное устройство с переходным процессом, показанным на рисунке 10.6 е, можно рассматривать как соединение звена чистого запаздывания и колебательного звена. Для всех измерительных устройств важным является время установления выходного сигнала (или показаний) Тп на рисунке 10.6, которое также называют временем реакции. Оно определяет собой отрезок времени, необходимый для завершения переходного процесса при скачкообразном изменении входного сигнала. Все рассмотренные переходные процессы на рисунке 10.6 теоретически заканчиваются только при бесконечном значении времени. Поэтому, за время реакции Тп обычно принимают время, за которое выходной сигнал измерительного устройства, приближаясь к новому установившемуся значению, входит в некоторую зону, отличающуюся от этого значения на (плюс, минус) 5 % от изменения выходного сигнала, соответствующего данному скачкообразному входному сигналу. Значение времени реакции может быть приближено определено через постоянную времени измерительного устройства из соотношения (10.10) /8/
ТП = (3 ÷5) , |
(10.10) |

Рисунок 10.6 - Типичные формы переходных процессов для измерительных устройств
Дифференциальные уравнения и передаточные функции рассмотренных наиболее типичных по инерционным свойствам измерительных устройств приведены в таблицу 10.1.
Таблица 10.1 – Дифференциальные уравнения и передаточные функции, наиболее типичные по инерционным свойствам измерительных устройств
Кривая переход |
Дифференциальное уравнение |
|
|
Передаточная функция |
||||||||||||||||||||||||||||||
процесса |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
||||
Рисунок 10.6 б |
|
|
|
|
|
|
|
Υ(τ)= Κ * Χ(τ) |
|
|
|
|
|
|
|
|
|
К |
|
|
|
|
|
|
||||||||||
Рисунок 10.6 в |
|
|
|
Τ |
|
dY (τ) |
+Y (τ)= K * X (τ) |
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
dτ |
|
|
|
|
|
|
|
|
|
|
|
T p +1 |
|
|
|
|
||||||||||||
Рисунок 10.6 г |
Τ2 |
d |
2 Υ |
( ) |
+T dY |
( ) |
+Y (τ)= K Χ(τ) |
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
|
|
τ |
2 |
|
|
|
|
1 |
|
|
d |
τ |
|
|
|
|
|
|
T 2 |
p2 +T p +1 |
|
|||||||||||
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
||
Рисунок 10.6 д |
|
|
|
T = |
dY |
(τ) |
+Y |
(τ) |
= K X (τ −τ3 ) |
|
|
|
|
|
|
|
|
|
K |
|
e |
−τ3 p |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T p +1 |
|
|
|
|
||||||||||||||
|
|
|
|
|
dτ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Рисунок 10.6 е |
T 2 |
d 2Y (τ) |
+T |
|
dY (τ) |
+Y |
(τ)= K X (τ −τ |
|
) |
|
|
|
|
|
|
K |
|
|
|
|
e−τ3 p |
|||||||||||||
|
3 |
|
T |
2 |
p |
2 |
+T |
p +1 |
||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||
|
2 |
|
dτ |
|
|
|
1 |
|
|
dτ |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Мы уже знакомы с методами измерений, но с применением измерительных устройств этот раздел имеет небольшое отличие и в то же время схожесть. Еще раз кратко их перечисляю:
-метод непосредственной оценки;
-метод сравнения с мерой;
-дифференциальный метод;
-нулевой метод;
-метод замещения;
-метод совпадения (или метод «нониуса») при его схожести, отметим его отличительность: В данном случае применяются две меры с разными ценами деления, которые отличаются на размер оцениваемого разряда отсчетов, но при условии, что в приборе применяется две шкалы - одна неподвижная - отсчетная и другая - подвижная - показывающая, но чем - то схожая со шкалами штангенциркуля!
Пусть имеем одну калиброванную меру с ценой деления ∆Х1 и изменяемую величину ∆Х, которая меньше цены деления. В этом случае используется вторая мера с ценой деления ∆Х2. Таким образом, если чувствительность необходимо увеличить в «n» раз, то соотношение между ними будет иметь вид формулы (10.11) /11/
∆X |
|
= ∆X |
|
|
|
1 |
|
|
|
|
KK |
K1 |
1 |
− |
|
|
, |
|
(10.11) |
||
|
|
|||||||||
|
|
|
|
n |
|
|||||
В частности, при n = 10 соотношение имеет вид формулы (10.12) /11/ |
||||||||||
|
|
|
|
|
∆XK |
|
=0,9∆XK |
(10.12) |
||
|
|
|
|
|
|
|
2 |
|
1 |
|
Для того чтобы были понятны формулы, приведем рисунок 10.7, на котором изображены эти шкалы
|
|
|
|
|
|
|
|
|
|
Первая мера |
|
|
||
0 |
|
1 |
|
2 |
3 |
4 |
|
5 |
со ступенями ∆хk1 |
10 |
||||
|
|
|
6 |
7 |
8 |
9 |
||||||||
|
|
|
|
|
|
|
∆хk1 |
|
|
|
|
|
|
|
|
|
|
|
Nx ∆xk1 |
|
|
|
Вторая мера |
|
|
||||
0 |
|
|
|
|
|
|
|
|
со ступенями ∆хk2 |
|
||||
1 |
2 |
3 |
4 |
|
5 |
6 |
7 |
8 |
9 |
10 |
||||
|
|
|
∆х |
|
|
∆хk2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 10.7 - «Нониусный» метод измерения Измеряемую величину ∆Х устанавливают между нулевыми отметками
мер и находят число Nх, равное номеру совпавших рисок деления мер, как на рисунке. В этом случае справедливо соотношение:
NX ∆X K 1 = ∆X + NX ∆X K 2 ,
откуда:
∆X = NX (∆XK1 −∆XK2 ) = NX (∆XK1 −0,9∆XK1 ) = NX 0,1∆XK1 ,
Метод «нониуса» находит широкое применение при измерении временных интервалов двух близких частот (биений) и в других случаях.
В настоящее время существует еще и классификация методов измерительных преобразований, основанная на концепции измерительных преобразований. Любой измерительный процесс представляет собой последовательное преобразование сигнала измеряемой величины в величину, ради которой была поставлена задача измерения. В связи с этим любое СИ представляется как последовательно соединенные звенья, передающие сигнал измерительной информации от входа к выходу и образующие как бы канал преобразования. Тогда, в общем случае, любой метод измерения можно представить как последовательное преобразование измеряемой информации в вид, удобный для восприятия наблюдателем. В зависимости от состава результирующей погрешности и погрешности отдельных преобразователей различают методы прямого и уравновешивающего преобразований.
При методе прямого преобразования входной параметр последовательно проходит все преобразователи разомкнутой цепи преобразования и по выходному отсчетному устройству оценивается результат измерения (здесь движение информации происходит только в одну сторону). Погрешность такого средства измерения полностью определяется погрешностью всех преобразователей цепи преобразования. При методе уравновешивающего преобразования в измерительных устройствах существует, как минимум, два канала преобразования: прямой и обратный. Выход канала прямого преобразования (КПП) подается на вход отсчетного устройства и одновременно на вход канала обратного преобразования (КОП), предназначенного для преобразования выходного сигнала КПП в величину, аналогичную по физической природе входной величине; на вход КПП подается разность между измеряемой величиной и выходным сигналом КОП. Результирующая погрешность такой структуры практически полностью определяется погрешностью КОП (влияние КПП ничтожно мало при соответствующем выборе коэффициента его преобразования). Метод прямого преобразования аналогичен методу непосредственной оценки, а метод уравновешивающего
преобразования - нулевому методу и, иногда, методу совпадения с нулевым одновременно при общепринятой классификации методов измерений /11/.
10.1 Погрешности измерительных устройств
Инструментальная погрешность (приводилась в таблице ранее) имеет определенное значение для наиболее распространенных технических измерений. Для измерительных устройств приводится особая классификация погрешностей измерений по ряду признаков. По характеру проявления при повторных измерениях одного и того же значения физической величины принято выделять систематическую и случайную погрешности (или составляющие погрешности) измерительных устройств. В эти понятия в основном вкладывается тот же смысл, что и в понятия систематической и случайной погрешностей простых или прямых измерений. Особенность здесь состоит в том, что всякое измерительное устройство предназначается для
несения в исследуемый технологический процесс ясной определенности (т.е. знание того, что происходит сейчас и, что было за истекшие сутки), а наличие случайной составляющей погрешности приводит к неоднозначности и к путанице в представлениях технологов. В связи с этим первая задача, которая обычно решается при создании измерительных устройств, состоит в том, чтобы случайную погрешность сделать незначительной. Если это условие выполняется, а элементы, входящие в состав измерительного устройства, работают стабильно, можно путем градуировки обеспечить достаточно малые систематические погрешности измерительного устройства.
Рассмотренная на рисунке 10.8 концепция используется как основная при создании рабочих средств измерений и, в частности, измерительных устройств для технологических измерений в производстве продукции.
В зависимости от условий применения измерительных устройств различают основную и дополнительную погрешности (см. рисунок 10.8).
Основной погрешностью измерительных устройств в комплексе с СИ называют погрешность при использовании их в нормальных условиях (производилось выше).
Дополнительной погрешностью называют изменения его погрешности, вызванной отклонением одной из влияющих величин (факторов влияния) от нормативного значения работы измерительного устройства или его выхода за пределы нормальной работы в области значений характеристик. Дополнительная погрешность может быть вызвана сразу несколькими факторами влияющих величин, и в практике работы операторов и слесарей КИПиА важно не растеряться, а быстро сориентироваться и устранить эти факторы так, чтобы измерительное устройство вошло в стабильный режим измерения и регулирования технологического процесса!
Функцией влияния - называется зависимость изменения какой-либо метрологической характеристики СИ и в целом измерительного устройства от изменений влияющих факторов величин или их совокупности.
Иными словами, дополнительная погрешность - это часть погрешности, которая добавляется (имеется в виду алгебраическое сложение) к основной в случаях, когда измерительное устройство применяется в рабочих условиях.
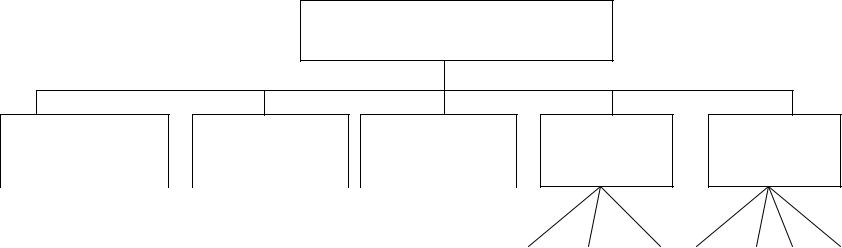
Погрешности измерительных устройств
От |
характера |
От условия при- |
От режима при- |
От |
формы |
От значения |
прояв-ления при |
менения измери- |
менения измери- |
представлени |
измеряемой |
||
првторном |
тельных |
тельных |
я |
|
величины |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Систематическая |
|
Случайная |
|
|
|
Основная |
|
Дополнительная |
|
|
Статистическая |
|
Динамическая |
|
Абсолютная |
|
Относительная |
|
Приведенная |
|
Аддитивная |
|
Мультипликативная |
|
Линейности |
|
Гистерезиса |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 10.8 – Погрешности измерительных устройств
57