

ТАУ методичка
.pdfЧастоты ω1 = |
1 |
; ω2 = |
1 |
; ω3 = |
1 |
|
; ω4 |
= |
1 |
. |
||||
τ |
T |
T |
|
|||||||||||
|
|
|
|
|
|
|
|
τ |
2 |
|
||||
|
1 |
|
1 |
|
2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|||
Частоты сопряжения НЧ цепи |
|
|
и |
|
|
выбираются значительно |
||||||||
T |
|
τ |
|
|||||||||||
|
|
|
|
|
1 |
1 |
|
|
|
|
||||
меньшими частоты среза корректируемой системы с тем, чтобы область частот, в которой цепь создает отставание, находилась левее частоты среза скорректированной системы. Частоты сопряжения ВЧ
цепи |
1 |
и |
1 |
выбираются так, чтобы частота среза скорректирован- |
||
T |
τ |
2 |
||||
|
|
|
||||
|
2 |
|
|
|
||
ной системы оказалась примерно посередине между ними.
При таком выборе максимальное опережение, создаваемое контуром, будет находиться в области частоты среза, благодаря чему достигается наибольший подъем ЛФЧХ в этой области частот, а следовательно, максимальное увеличение запаса устойчивости по фазе и улучшение переходного процесса.
7.4. КоррекцияСАРспомощьюобратнойсвязи
Повышение показателей качества может быть достигнуто включением корректирующих устройств не только последовательно, но и параллельно отдельным звеньям системы.
X1 |
X2 |
К0(р)
КОС(р)
Рис. 7.9. Звено K0(p), охваченное отрицательной обратной связью с передаточной функцией KOC(p)
Часть САР (как показано на рис. 7.9) с передаточной функцией K0(p) охвачена обратной связью, содержащей корректирующее устройство с передаточной функцией KOC(p). В этом случае передаточная функция части системы будет определяться следующим образом:
41

К охв |
( p) = |
x2 |
( p) |
= |
|
|
|
К 0 ( p) |
|
|
, где «+» или «–» в знаменателе |
|
|
|
+K |
|
( p) K |
|
( p) |
||||
|
|
x ( p) 1 |
0 |
OC |
|
||||||
|
1 |
|
|
|
|
|
|
|
|||
соответствует отрицательной или положительной обратной связи. Последнее выражение можно определить в виде:
К охв ( p) = К 0 ( p) |
|
|
|
1 |
|
|
= К 0 ( p) К n ( p), |
||||
1 +К |
( p)К |
OC |
( p) |
||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
здесь К n ( p) = |
|
|
1 |
|
|
|
– передаточная функция последова- |
||||
|
|
|
|
|
|
||||||
1 +К |
O |
( p)К |
OC |
( p) |
|||||||
|
|
|
|
|
|
|
|
|
|||
тельно включенного звена, эквивалентного по своему действию параллельному корректирующему устройству с передаточной функ-
цией KOC(p).
Тогда структурная схема будет выглядеть (рис. 7.10):
X1(p) |
|
|
|
X2(p) |
|||
|
|
|
Кп(р) |
|
|
К0(р) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Рис. 7.10. Последовательное включение звеньев Kn(p) и K0(p)
Таким образом, введение параллельного корректирующего устройства с передаточной функцией KOC(p) равносильно включению последовательного устройства с передаточной функцией
К n ( p) = |
|
|
1 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
1 +К |
0 |
( p)К |
OC |
( p) |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Заменим p на jω, перейдем в частотную область, тогда |
|||||||||||||||||
|
|
|
|
К охв ( jω) = |
|
|
|
К 0 ( jω) |
|
|
|
. |
|||||
|
|
|
|
1 +К |
0 |
( jω)К |
OC |
( jω) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если в какой-либо области частот выполняется условие |
|||||||||||||||||
|K0(jω) · KOC(jω)| >> 1, то К охв |
( jω) ≈ ± |
1 |
|
|
. Таким образом, при |
||||||||||||
|
|
|
|
||||||||||||||
К ОС |
(jω) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
выполнении последнего условия передаточная функция части системы, охваченной обратной связью в этой области частот, равна обратному значению передаточной функции параллельного корректирующего устройства.
42

Следовательно, с помощью параллельных корректирующих устройств удается изменить частотную характеристику системы.
7.5. ПримеркоррекцииСАРспомощьюобратнойсвязи
Коррекция следящей системы с помощью гибкой ОС по второй производной, охватывающей двигатель (рис. 7.11).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
двигатель |
||||||||
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
β |
|
|
К1 |
|
|
|
|
|
|
|
К2 |
|
|
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Т2 р+1 |
|
|
|
|
|
|
|
|
Т1 р + 1 |
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t · р |
|
|
|
|
|
Ктг · р |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
tр + 1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференцирующий |
|
|
|
Тахогенератор |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
контур |
|
|
|
|
|
|
|
|
|
||
|
Рис. 7.11. Коррекция следящей системы с помощью гибкой ОС |
||||||||||||||||||||||
|
ККУ без местной обратной связи: |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
К (jω)= |
|
К1 |
К 2 |
|
|
; |
T1 > T2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
jω(T2 jω+1)(T1 jω+1) |
|
|
|
|
|
|
||||||||||
ЛАЧХ L(ω) и ЛФЧХ φ(ω), САР не устойчива.
Гибкая отрицательная обратная связь (ООС) по второй производной охватывает апериодическое и интегрирующее звенья(двигатель) и описывается ККУ:
|
|
|
τOC |
|
|
К OC (jω)= |
К |
тг |
τ(jω)2 |
(пусть τ > T1), |
|
τ(jω)+1 |
|||||
|
|
||||
ККУ участка схемы, охваченного обратной связью имеет вид:
43

|
|
К охв (jω)= |
|
|
|
К 2 |
jω(T1 jω +1) |
|
|
|
|
|
= |
|
|
|
|
||||||||||||||||
|
|
1 + |
|
|
К 2 |
|
|
|
|
|
K тг |
τ(jω)2 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
jω(T jω +1) |
|
|
|
τjω +1 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
К 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
||||
|
jω(T jω +1)(τjω +1) + K |
2 |
K |
тг |
τ( jω)2 |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
τjω +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
|
|
|
|
|
|
|
К 2 (τjω +1) |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|||||||
jω(T jω +1)(τjω +1) |
+ K |
2 |
|
K |
тг |
τ( jω)2 |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
= |
|
|
|
|
|
|
|
|
К 2 (τjω +1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
||||
jω T |
jω τ jω +T jω + τjω +1 + K |
2 |
τ |
OC |
jω |
] |
|
|
|||||||||||||||||||||||||
|
|
|
[ 1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
= |
|
|
|
К 2 (τjω+1) |
|
|
|
|
|
|
= |
|
|
|
|
|
К 2 (τjω+1) |
|
= |
||||||||||||||
jω T τ( jω)2 |
|
+ jω(T +τ+K τ |
) +1 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
jω(T |
|
jω+1)(T |
jω+1) |
||||||||||||||||||||||||||
|
1 |
|
|
|
1 |
|
|
|
2 |
OC |
|
|
|
|
|
|
|
|
|
1k |
|
|
|
|
|
|
|
|
2k |
|
|
||
|
T |
|
T |
=T τ |
|
|
, можно записать: |
|
|
|
|||||||||||||||||||||||
обозначив 1k |
|
2k |
1 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
T1k +T2k =T1 +τ+K 2 τOC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
= |
|
|
|
|
|
К 2 (τjω+1) |
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|||||||||
|
|
|
|
jω T |
T |
( jω)2 +(T |
|
|
|
+T |
|
) jω+1 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
1k |
|
2k |
|
|
1k |
|
|
|
|
2k |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где из системы уравнений определим T1k и T2k (имеет место неравенство T1k > τ > T1 > T2k *) ККУ системы, скорректированной местной обратной связью:
К |
|
( jω) = |
К1 |
К |
|
= |
|
К1К 2 (τjω+1) |
|
ск |
|
охв |
jω(T |
jω+1)(T |
jω+1)(T jω+1) |
||||
|
|
T jω+1 |
|
||||||
|
|
|
2 |
|
|
|
1k |
2k |
2 |
Коэффициент усиления и порядок астатизма САР при охвате апериодического и интегрирующего звеньев обратной связью по второй производной не изменились. Постоянная времени T2k путем выбора параметров обратной связи может быть сделана при необходимости меньше, чем T2 (или несколько больше). ЛАЧХ и ЛФЧХ скорректированной системы (с учетом неравенства *) изображены графиками Lck(ω), φck(ω). Система стала устойчивой при заданном большом коэффициенте усиления (см. рис. 7.12).
Этого можно было достичь с помощью последовательной интегродифференцирующей цепи. ЛАЧХ Lck(ω) последовательной ИДЦ
44
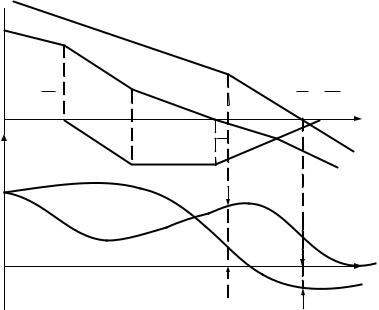
получены вычитанием L(ω) из Lck(ω). Постоянные времени T1k, τ и T2k , входящие в передаточную функцию эквивалентной схемы, выбираются из тех же соображений, что и постоянные времени ИДЦ при последовательной коррекции.
L(ω)
60 |
|
|
|
|
40 |
|
|
|
|
20 |
1 |
ωс.ск |
1 |
1 |
|
T1k |
T2 |
T2k |
|
0 |
|
|||
1 |
|
|
|
|
ϕ(ω) |
1 |
|
|
|
|
τ |
Т1 |
|
|
|
|
|
|
|
|
ϕ(ω) |
|
|
|
−90˚ |
|
|
|
|
|
ϕск(ω) |
|
ϕ3ск |
|
|
|
|
|
|
−180˚ |
|
|
|
ω |
|
|
|
|
|
|
|
|
|
ϕ3 |
−270˚ |
|
|
|
|
Рис. 7.12. Амплитудная частотная характеристика и логарифмическая фазовая частотная характеристика
45
8. ЗАДАНИЯНАКУРСОВУЮРАБОТУ
Задание1
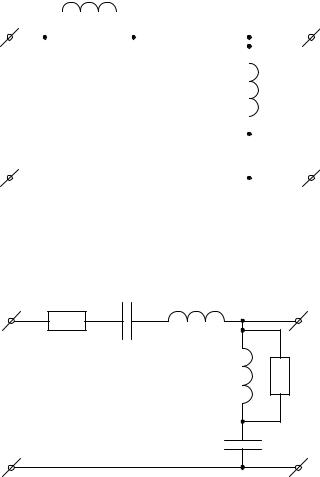
1.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = R2 = R3 = 1 Ом, C1 = C2 = 1 мкФ, L1 = L2 = 1 мГн.
L1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
R 2 |
|
|
|
|
|
|
|
|
|
|
|
|
C1 |
|
|
|
|
|
|
R 3 |
|||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
L2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
U1(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
U2t |
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
С2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = R2 = 1 Ом, C1 = C2 = 1 мкФ, L1 = L2 = 1 мГн.
R1 |
C 1 |
L1 |
|
|
|
L2 |
R2 |
U1(t) |
|
|
U2(t) |
|
|
|
|
|
|
|
С2 |
46
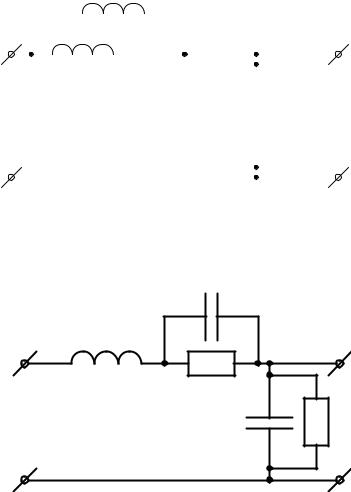
3.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = 10 Ом, C1 = 1 мкФ, C2 = 2 мкФ, L1 = 1 мГн, L2 = 2 мГн.
L 2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
U2(t) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
U1(t) |
|
C1 |
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
С2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = R2 = 1 Ом, C1 = C2 = 10 мкФ, L = 10мГн.
|
C1 |
|
L |
U1(t) |
U2(t) |
R 1 |
|
|
С2 |
|
R 2 |
47
5.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = R2 = 2 Ом, C1 = C2 = 2мкФ, L1 = L2 = 2 мГн.
L1
R 1
C1
С2
U1(t) |
U2(t) |
L2
R 2
6.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = R2 = 10 Ом, C1 = C2 = 10 мкФ.
R 1
C1
U1(t) |
С 2 |
U2(t) |
R 2 |
48
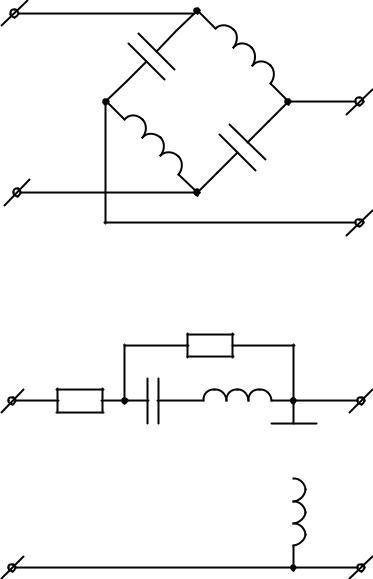
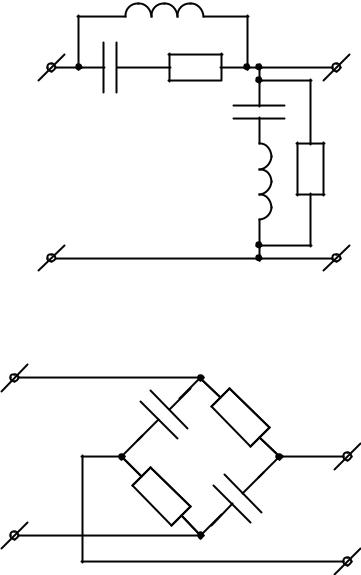
7.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
C1 = C2 = 10 мкФ, L1 = L2 = 10 мГн.
C1 |
L1 |
U1(t)
L2 |
С2 |
U2(t) |
8.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = 10 Ом, R2 = 2 Ом, C1 = 1 мкФ, C2 = 2 мкФ, L1 = 10 мГн, L2 = = 20 мГн.
R2
R1 |
C1 |
L1 |
|
|
|
|
|
|
|||
|
С2 |
|
|
||
|
|
|
U2(t) |
||
U1(t) |
|
|
|
|
|
|
L 2 |
||||
|
|
||||
49

9.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = R2 = 2 Ом, C1 = C2 = 2 мкФ, C3 = 4мкФ, L1 = L2 = 3 мГн.
|
С2 |
|
R1 |
L1 |
С3 |
C1 |
|
|
U1(t) |
|
U2(t) |
|
R2 |
|
|
|
|
|
|
L2 |
10.Найти передаточную функцию и дифференциальное уравнение пассивной электрической цепи относительно U1(t) и U2(t):
R1 = R2 = 2 Ом, C1 = C2 = 20 мкФ, L = 5 мГн.
C1
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
U2(t) |
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
U1(t) |
|
|
|
|
|
|
|
|
|
R2 |
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
С2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50