

ТАУ методичка
.pdfНа резонансной частоте ωmax АЧХ имеет максимум Kmax (рис 6.2). При дальнейшем увеличении частоты система вследствие своей инерционности, которая отражается постоянными времени ее звеньев, не успевает реагировать на колебания больших частот и A(ω) резко «падает». По своим частотным свойствам следящая система может быть отнесена к классу фильтров нижних частот.
Установлено, что чем больше Kmax , тем более колебательным является переходный процесс. Отношение Kmax /K0 = M называют показателем колебательности. Для следящих систем K(0) = 1, поэтому M = Kmax. Обычно M = 1,2 ÷ 1,5. При малых М система имеет большое время регулирования. При больших М увеличивается перерегулирование и система приближается к границе устойчивости.
Кроме частоты ωmax, характерными частотами АЧХ являются ωсз и ωn. Частота ωсз называется частотой среза замкнутой системы и определяется на уровне K = 1. Для следящих систем частота ωсз определяет диапазон частот вынужденных колебаний, которые система пропускает без ослабления. На этой частоте амплитуды входного и выходного колебаний равны. Частота ωn называется полосой пропускания замкнутой системы и определяется на уровне К (0) 2 = 0,707 . Так как в диапазоне частот ωсз ÷ ωn АЧХ резко «падает», то значения частот
2 = 0,707 . Так как в диапазоне частот ωсз ÷ ωn АЧХ резко «падает», то значения частот
ωсз и ωn близки.
Полоса пропускания влияет на точность и быстродействие системы. С увеличением полосы пропускания быстродействие системы растет. Чем больше полоса пропускания, тем больший спектр входного сигнала передается системой без искажений. Следовательно, точность отработки входного сигнала повышается.
О качестве регулирования можно судить по ЛАЧХ. На основании расчетов переходных процессов было установлено, что для удовлетворительного качества регулирования участок средних частот, на котором ЛАЧХ пересекает ось абсцисс, должен иметь наклон 20 дБ/дек. Протяженность этого участка влияет на перерегулирование. С его увеличением уменьшается колебательность переходного процесса. Приемлемое качество переходных процессов имеет место, если протяженность этого участка примерно равна декаде. Время регулирования tp зависит от частоты среза, при которой ЛАЧХ пересекает ось абсцисс. Чем больше ωсз, тем меньше tp .
Применение типовых ЛАЧХ разомкнутых систем позволило составить номограмму, с помощью которой, зная М, ωmax , ωсз и ωn , можно определить время регулирования tp , время установления ty,
31
максимальное значение переходной характеристики переходного
процесса hmax и др.
Рассмотрим интегральные оценки переходных процессов, которые позволяют заменить набор оценок одной величиной.
Интегральная оценка – это определенный интеграл от некоторой функции переходной составляющей ошибки.
Эта оценка применяется для астатических следящих систем. В САР такого типа установившееся значение ошибки стремится к нулю, а переходная составляющая ошибки равна ошибке системы,
т.е. E(t) = x(t) – y(t).
Вобщем виде интегральная оценка определяется как
J = ∞∫f [E (t )]dt.
0
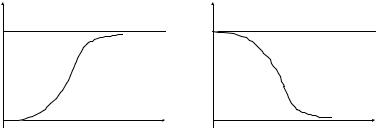
Ограничение по применению данной оценки заключается в том, что она используется только для переходных процессов без перерегулирования, когда ошибка не меняет знака. Интеграл представляет
собой площадь под кривой регулирования (рис. 6.3).
∞
Простейшая интегральная оценка: J 00 = ∫f [E (t )]dt .
0
а |
б |
h (t ) |
E (t ) |
1
(+)
(+)
t |
t |
Рис. 6.3. Кривые переходных характеристик:
а– переходная характеристика в САР без перерегулирования;
б– интегральная оценка в САР без перерегулирования
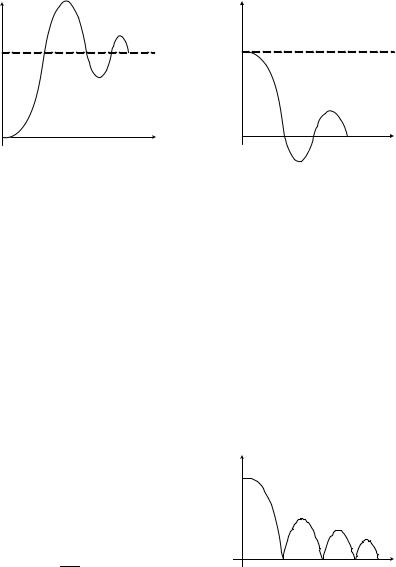
При колебательном характере переходного процесса данная оценка не применяется, так как h(t) и E(t)имеют разные знаки (рис. 6.4).
32
а |
б |
|
|
|
|
|
|
h(t) |
|
E (t) |
|
|
|
|
|
(-) |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
(+) |
|
|
|
|
|
|
|
|
|
|
(+) |
|
|
|
|
|
t |
|
|
|
|
|
t |
|
|
|
|
|
|
(+)- |
|
Рис. 6.4. Кривые переходных характеристик: а – переходная |
|||||||
характеристика при колебательном характере процесса в САР; |
|||||||
б – интегральная оценка в САР с перерегулированием |
|||||||
Здесь используют следующую оценку: J |
|
|
∞ |
f E (t ) dt . |
|||
01 |
= |
∫ |
|||||
|
|
|
|
[ |
] |
||
|
|
|
|
|
0 |
|
|
В этом случае оценка представляет собой определенную слож- |
|||||||
ность, поэтому для оценки колебательных и монотонных переход- |
|||||||
ных процессов часто используется квадратичная интегральная оцен- |
|||||||
ка: J 02 = ∞∫f [E (t )]dt . |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Такая оценка не зависит от знака ошибки, а значит от характера |
|||||||
переходного процесса (рис. 6.5). |
|
|
|
|
|
|
|
Оценка представляет собой площадь под кривой квадрата ошибки. |
|||||||
Чем меньше данная оценка, тем ближе |
|
|
|
|
|
|
|
переходный процесс к идеальному сту- |
E( t) |
|
|
|
|
||
пенчатому изменению выходной вели- |
|
|
|
|
|
|
|
чины, вызванному ступенчатым изме- |
|
|
|
|
|
|
|
нением входной величины. |
|
|
|
|
|
|
|
Квадратичную интегральную оцен- |
|
|
|
|
|
|
|
ку можно улучшить, если учитывать не |
(+) |
|
|
|
|
||
только ошибку, но и скорость ее изме- |
|
|
|
|
(+) |
t |
|
нения, т. е. dE |
, тогда интегрирующая |
|
|
|
|
|
|
|
|
|
|
|
|
||
dt |
|
Рис. 6.5. Квадратичная |
|||||
оценка примет вид: |
|||||||
|
|
|
интегральная оценка |
||||
33

J1 = ∞∫f E 2 (t) +τ1 E 2 (t) dt .
0
Используют также более сложные оценки. Можно учитывать высшие производные оценки.
При любых интегральных оценках качество переходного процесса тем лучше, чем меньше величина соответствующего интеграла.
Из теории САР известно, что передаточную функцию любой зам-
кнутой САР можно представить в виде: K ( p) = Kγ K ( p) ,
p p
p
где K – общий передаточный коэффициент; γ – количество интегрирующих звеньев; K*p(p) – передаточная функция разомкнутой системы.
Если γ = 0, интегрирующие звенья отсутствуют, это статическая САР.
Если γ = 1, включает одно интегрирующее звено, это астатическая САР первого порядка.
Если γ = 2, включает два интегрирующих звена, это астатическая
САР второго порядка и т. д. |
|
|
|
|
|
|
Астатизм по возмущающему воздействию: К |
|
( р) = |
К |
К |
( р), |
|
осf |
рγ |
|||||
|
|
OC |
|
где KOC –коэффициент передачи цепи ОС; γ – количество интегрирующих звеньев цепи ОС; K*p(p) – передаточная функция цепи ОС без интегрирующих элементов.
Если γ = 0, то система называется статической САР по возмущению и нет интегрирующих звеньев в цепи ОС.
Если γ = 1, то в цепи ОС одно интегрирующее звено и система будет называться астатической САР первого порядка.
34
|
|
7. КОРРЕКЦИЯСАР |
|
||
Введение корректирующих устройств в систему регулирования на- |
|||||
правлено на повышение точности работы системы в установившемся |
|||||
режиме и достижении приемлемого качества переходных процессов. |
|||||
Для уменьшения ошибок в установившемся режиме необходимо |
|||||
повысить коэффициент усиления системы в разомкнутом состоянии |
|||||
K, но с увеличением K уменьшается запас устойчивости и ухудшает- |
|||||
ся переходный процесс системы. |
|
|
|||
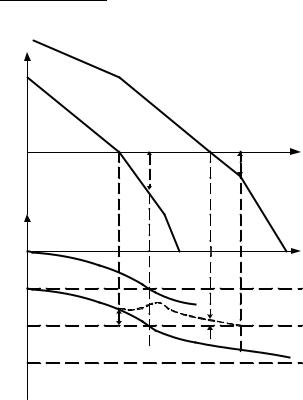
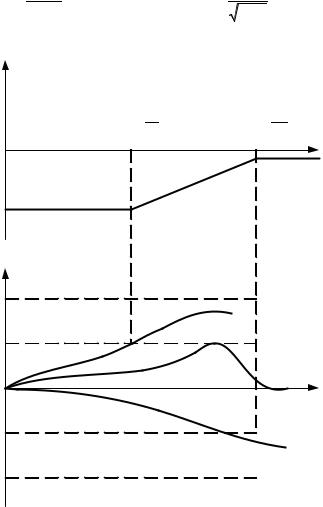
Построим ЛАЧХ и ЛФЧХ для следящей системы, коэффи- |
|||||
циент передачи которой в разомкнутом состоянии (рис. 7.1): |
|||||
|
К |
|
|
|
|
К p (p )= p T p +1 T p +1 |
) |
|
|
||
( 1 |
)( 2 |
|
|
|
|
L(ω) |
|
|
|
|
|
|
|
|
L2(ω) |
|
|
|
|
L1(ω) |
|
|
|
|
|
ωc1 |
ωc2 |
ω |
|
|
|
|
|
L31 |
L32 |
|
|
|
|
|
|
φ1(ω) |
|
|
|
|
|
|
|
|
φ2 |
|
ω |
−90° |
|
|
|
|
|
|
|
|
|
|
|
−180° |
|
φ31 |
|
φ32 |
|
−270° |
|
|
|
|
φ1 |
|
|
|
|
|
|
Рис. 7.1. Логарифмическая амплитудная частотная характеристика |
|||||
и логарифмическая фазовая частотная характеристика |
|||||
35
Из графиков видно, что на первом участке при K = K1 у системы достаточный запас устойчивости по амплитуде и фазе, а следовательно, и хороший переходный процесс. Однако из-за большой ошибки по скорости САР практически нельзя использовать.
Если же для уменьшения ошибки по скорости увеличить K до K2, то САР становится неустойчивой. Для того чтобы при увеличении K разомкнутой системы сохранить устойчивость, необходимо частично компенсировать запаздывание в полосе частот, которая расположена около частоты среза ωc2, соответствующей увеличенному коэффициенту усиления K2, т. е. деформировать ЛФЧХ системы, приподняв ее вверх. Такую деформацию ЛФЧХ можно осуществить, включив последовательно в систему устройство, которое в отличие от других элементов вносило бы не запаздывание, а опережение по фазе синусоидальных колебаний в указанной полосе частот. Этого можно достичь сложени-
dU c (t ) dt .
При использовании в системе исполнительного двигателя, реагирующего на сигнал рассогласования, в момент пуска двигатель развивает большее вращающее усилие, а при уменьшении сигнала рассогласования в результате изменения знака производной приводит к уменьшению (или устранению) перерегулирования и быстрее затухает переходный процесс.
Необходимого функционального преобразования сигнала рассогласования системы можно достичь, включая корректирующие устройства последовательно и параллельно элементам системы.
7.1. Корректирующиеустройства. Последовательныекорректирующиеустройства
|
|
|
R1 |
|
|
|
|
|
Наиболее часто применяется ре- |
|||||||
|
|
|
|
|
|
|
|
|
|
альная дифференцирующая цепь, |
||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
при определенных значениях называ- |
||||||
|
|
|
|
|
|
|
|
|
|
емая форсирующей цепью (рис. 7.2). |
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Uвх |
|
|
|
|
R2 |
|
|
|
Передаточная функция этой цепи: |
|||||||
C1 |
|
|
|
Uвых |
|
|
|
K (T1 p +1) |
|
|||||||
|
|
|
|
|
|
|
|
|
|
K ( p) = |
U вых ( p) |
= |
, |
|||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
U |
|
( p) |
|
(T p +1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
вх |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 7.2. Реальная дифференцирующая цепь
36
где K – коэффициент передачи; T1 и T2 – постоянные времени, ха- |
|
рактеризующие опережение и отставание K = R2/R1 + R2, T1 = R1C, |
|
T1 = KT1. |
|
Так как K < 1, то T1 < T2, φ(ω) = arctgT1 – arctgT2, |
|
из условия dϕ(ω) = 0 находим частоту ωmax = |
1 . |
dω |
T1T 2 |
L(ω) |
|
1 |
1 |
ω1 = |
ω2 = |
T1 |
T 2 |
|
lgω |
20 lgK |
|
φ(ω) |
|
+90° |
φ1(ω) |
|
|
+45° |
φ(ω) |
|
|
|
lgω |
− 45° |
φ2(ω) |
− 90° |
|
Рис. 7.3. Логарифмическая амплитудная частотная характеристика |
|
и логарифмическая фазовая частотная характеристика |
|
37
|
|
+ j |
|
|
Достоинство коррекции САР с по- |
|
|
|
|
|
мощью последовательного дифферен- |
|
|
|
|
|
|
|
|
|
|
|
цирующего фазоопережающего устрой- |
|
|
|
|
|
ства состоит в том, что одновременно |
|
|
K(jω) |
ω |
с увеличением коэффициента усиле- |
|
|
|
|
|
ния K удается увеличить и частоту среза |
|
|
|
|
|
|
|
|
|
|
|
ω |
ωc системы, т. е. наряду с уменьшением |
|
|
|
|
||
|
|
|
|
|
ошибки в установившемся режиме име- |
|
|
|
|
|
ется возможность уменьшения и време- |
Рис. 7.4. Амплитудно-фазовая |
ни переходного процесса. |
||||
Недостатки форсирующей цепи: |
|||||
|
характеристика реальной |
– ослабление полезного сигнала в об- |
|||
дифференцирующей цепи
ласти низких частот, т. е. там, где содержится спектр полезного сигнала.
– ошибка системы под влиянием высокочастотных помех может увеличиваться.
7.2. Реальнаяинтегрирующаяцепь
Для уменьшения влияния высокочастотных помех используют интегрирующее устройство (рис. 7.5).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
R1 |
|
|
|
|
|||
|
|
|
|
|
|
||||
|
|
|
|
||||||
|
Uвх |
|
|
|
|
Uвых |
|||
|
|
|
|
||||||
|
|
|
|
|
|
|
R 2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.5. Реальная интегрирующая цепь |
|
|
|
||
Передаточная функция такой цепи: К (p )= |
U вых (p ) |
= |
1 +T1 p |
||
|
|
|
|
||
U вх (p ) |
1 +T2 p |
||||
где T2 = R2C – постоянная времени опережения контура, T1 = C(R1 + R2) – постоянная времени отставания.
38

К = |
T2 |
= |
R2 |
, отсюда T2 = T1K и T1 > T2, так как K < 1. |
T1 |
|
|||
|
|
R1 +R2 |
||
Основные характеристики: |
в |
L1(ω) |
1 |
|
|
1 |
|
|
|
ω1 = |
ω2 |
= |
|
||||
a |
б |
|
ω |
|||||
|
|
T1 |
|
|
T2 |
|||
+j |
h(t) |
|
20 lgК |
|
|
|
|
|
|
К |
|
|
|
|
|
|
|
|
|
φ(ω) |
|
|
|
|
|
|
К |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ω |
|
|
ωmax |
|
|
|
ω |
ω = ∞ |
ω = 0 |
|
−90° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.6. Графические зависимости реальной интегрирующей цепи:
а– амплитудная фазовая характеристика; б – переходная характеристика;
в– логарифмическая амплитудная частотная характеристика
илогарифмическая фазовая частотная характеристика
ЛФЧХ построена по выражению
ϕ(ω)= −arctg (ωT1 )+arctg (ωT2 );
ωmax = ω1 ω2 = |
1 |
|
1 |
= |
|
1 |
|
, |
|
|
T |
|
|||||
|
T1 |
T2 |
K |
|||||
|
|
|
|
|
1 |
|
|
|
и, соответственно, ϕmax (ω)= −arctg (ωmaxT1 )+arctg (ωmaxT2 ).
Интегрирующая цепь вносит отставание по фазе – это недостаток. Однако при соответствующем выборе параметров устройства область отставания может быть смещена в сторону низких частот, значительно левее частоты среза системы, поэтому запас устойчивости САР при включении интегрирующего звена не уменьшается.
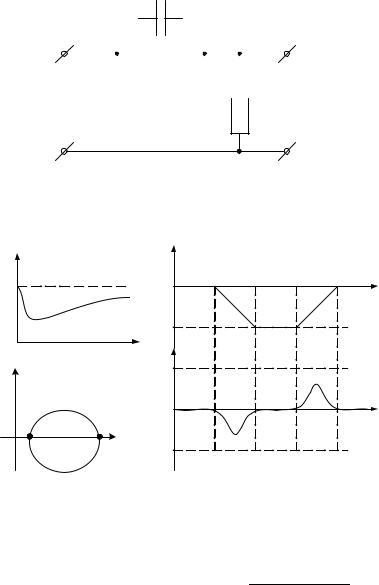
7.3. Интегро-дифференцирующаяцепь
По сравнению с реальной интегрирующей цепью в интегродифференцирующей используется дополнительный конденсатор C1, подключенный параллельно R1 (рис. 7.7):
39
C1
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С2 |
|
Uвх |
R1 |
|
|
|
|
|||||||
|
|
|
|
|||||||||
|
|
|
|
Uвых |
||||||||
|
|
|
|
|
|
|
|
|||||
R2
|
|
Рис. 7.7. Интегродифференцирующая цепь |
|
|
||||
|
Основные характеристики: |
|
|
|
|
|||
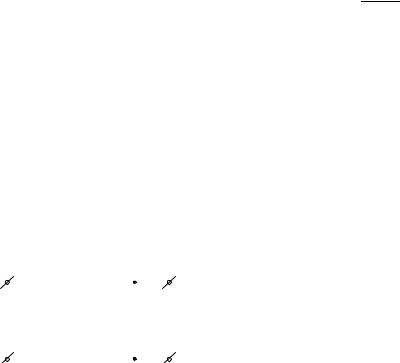
а |
h(t) |
в |
|
L(ω) |
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
ω1 |
ω2 |
ω3 |
ω4 |
ω |
|
|
|
|
|
|
|
|
|
|
|
|
−20 lgК |
|
|
|
|
|
|
|
f |
φ(ω) |
|
|
|
|
|
б |
|
+90° |
|
|
|
|
||
+j |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
α |
1 |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
−90° |
|
|
|
|
|
|
ω = 0 |
|
|
|
|
|
|
Рис. 7.8. Графические зависимости интегро-дифференцирующей цепи: а – переходная характеристика; б – амплитудно-фазовая характеристика звена в – логарифмическая амплитудная частотная характеристика
и логарифмическая фазовая частотная характеристика
( ) (pτ +1)( pτ +1)
Передаточная функция имеет вид: К p = ( 1 ) 2 , pT1 +1 ( pT2 +1)
где τ1 = С1R1; τ2 = С2R2 ; T1 = ατ1; T2 = τ2/α; α << 1.
40