


|
|
Таблица 5.5 |
|
|
|
Период |
Частота |
Амплитуда |
генератора |
генератора |
колебаний |
Т, мс |
f, Гц = 1/Т |
А, град |
|
|
|
|
|
|
2. Построить график зависимости амплитуды колебаний системы от частоты генератора (амплитудную характеристику резонанса).
3. Из теории вынужденных колебаний следует, что зависимость амплитуды колебаний от частоты изменяется по лоренцевой кривой
A( f ) = |
|
A f 2 |
|
|
|
|
||
|
0 |
0 |
|
|
|
, |
(5.9) |
|
|
|
|
|
|
|
|||
( f 2 - f02 )2 + |
b 2 f 2 |
|
||||||
|
|
|
|
|
|
|||
|
|
p 2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
здесь А(f) – амплитуда колебаний при частоте f, A0 – амплитуда при нулевой частоте, f0 – частота собственных колебаний системы, β – коэффициент затухания системы. Кривая Лоренца изображена на рис. 5.3.
А(f)
Am
Am/(2)1/2
f1 |
|
fрез |
|
f2 |
|
f |
|
|
|
Рис. 5.3. Амплитудная характеристика резонанса.
4. На основе построенной амплитудной характеристики определить следующие параметры резонансной кривой:
резонансную частоту fрез, амплитуду в резонансе Аm,
полуширину резонансной кривой f = f2 – f1, коэффициент затухания β ≈ πΔf, добротность резонанса Q = fрез/Δf.
Все измерения производить при определенном углеΘ расположения парусов, установленных на колебательной системе, относительно воздушного потока.
5. Изменить аэродинамическое трение. Для этого два раза изменить угол наклона парусов (выбрать углы ориентации Θ=00, 450, 900) относительно воздушного потока.
44
6. Для измененных конфигураций парусов снова снять амплитудные характеристики резонансов. На одном графике построить три амплитудные
характеристики резонанса. По графикам определить параметры резонансных кривых. Результаты измерений занести в табл. 5.6.
|
|
|
|
|
Таблица 5.6 |
|
|
|
|
|
|
|
|
Угол |
fрез . гц |
Am,0 |
f, гц |
β, 1/с |
|
Q |
ориентации Θ,0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
45 |
|
|
|
|
|
|
90 |
|
|
|
|
|
|
7. Построить графики зависимости параметров резонансных кривых от угла ориентации парусов относительно оси вращения. Сделать выводы по работе.
Задание 2. Изучение фазовой характеристики резонанса Ход работы
1. Для снятия зависимости сдвига фаз между частотой внешней периодической силы (частотой генератора) и частотой колебаний системы
необходимо тумблер «1 |
Т 2» поставить в положение « Т». При этом таймер |
|||||||||
позволяет |
измерять |
запаздывание |
по |
времени |
колебанийсистемы |
|||||
относительно |
колебаний |
генератора |
при |
возбуждении |
вынужденны |
|||||
колебаний. |
Отсчет |
времени |
запускается |
|
от |
сигнала |
генератора |
|||
останавливается от датчика стола. Поскольку за один период колебаний щель |
||||||||||
диска стола колебательной системы проходит дважды через зазор датчика, при |
||||||||||
измерении запаздывания |
будут |
поочередно |
|
записываться |
пары |
отсчетов |
||||
времени. Меньший отсчет дает искомое запаздывание. Второй |
(лишний) |
|||||||||
отсчет больше первого на половину периода колебаний. |
|
|
|
|||||||
2. Для правильного измерения разности фаз важно, чтобы равновесное положение стола соответствовало нахождению щели в зазоре фотодатчика.
3. Фазовый сдвиг ΔΦ определяется через время запаздывания Т:
ΔΦ = 2πΔТ/Т, |
(5.10) |
где Т – период колебаний.
4. Снять зависимость времени запаздывания и сдвига фаз от частоты генератора f. Частота генератора измеряется так , жекак в амплитудных измерениях. Результаты измерений занести в табл. 5.7.
5.Построить график зависимости сдвига фаз от частоты генератора (фазовую характеристику резонанса).
6.Следуя теории, сдвиг фаз зависит от частоты внешней периодической силы по закону:
45
é |
|
bf |
|
ù |
|
|
||
DF = arctg ê |
|
|
|
|
|
ú |
, |
(5.11) |
|
2 |
- f |
2 |
|
||||
ëp ( f |
|
0 |
) û |
|
|
|||
где f0 – собственная частота колебаний системы, β – коэффициент затухания.
|
|
|
Таблица 5.7 |
|
|
|
|
|
|
Период |
Частота |
Запаздывание |
Сдвиг фаз |
|
генератора |
f, Гц |
Т, мс |
ΔΦ, о |
|
Т, мс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.Изменить силу аэродинамического трения: для этого два раза изменить угол наклона парусов относительно оси вращения системы. Для измененных конфигураций парусов снова снять фазовые характеристики резонансов.
8.Сделать выводы по работе. Выявить изменения фазовых кривых от
угла ориентации парусов относительно оси вращения.
Вопросы к коллоквиуму
1.Какое колебание можно считать гармоническим?
2.Выведите уравнение движения, решением которого является гармоническое колебание.
3.Как, используя уравнение движения, определить период колебаний системы?
4.Вычислите период колебаний физического маятника.
5.Напишите уравнение затухающих гармонических колебаний.
6.Назовите параметры затухающих гармонических колебаний.
7.Какие колебания называются вынужденными?
8.Какое явление называется резонансом?
9.Нарисуйте амплитудную и фазовую характеристику резонанса.
10.Назовите параметры амплитудной характеристики резонанса.
11.Как изменяется амплитудная характеристика резонанса при увеличении коэффициента затухания?
46
6. Гироскопы
Гироскопом называется твердое , вращающеесятело вокруг неподвижной точки О и обладающее осью вращения, которая проходит через центр инерции гироскопа. Гироскопы называются уравновешенными, если точка О совпадает с центром инерции гироскопа.
При инерционном вращении уравновешенного гироскопа вокруг оси
динамической симметрии ориентация этой |
оси не |
меняется |
с течением |
времени. |
осиY (рис. |
|
|
При вращении гироскопа относительно |
6.1) с |
угловой |
скоростью ω, момент импульса гироскопа L = Iω направлен вдоль этой оси, где I – момент инерции гироскопа.
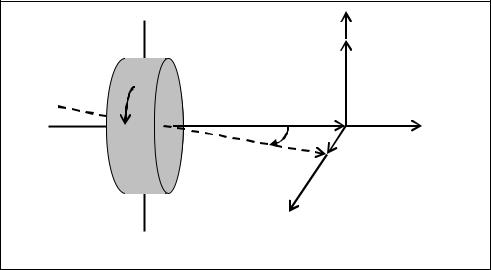
Если попытаться повернуть гироскоп, прикладывая силу F вдоль оси Z вертикально вверх, то вращающий момент силы M = [r x F], по правилу векторного произведения, будет направлен вдоль осиХ. Согласно закону
вращательного движения |
|
М = dL/dt, |
(6.1) |
вектор изменения момента импульса dL тоже направлен вдоль оси Х. |
|
Таким образом, воздействие внешней силы приводит к |
изменению |
момента импульса гироскопа. За счет этого гироскоп начнет вращаться относительно оси ОО΄ с некоторой частотой. Это явление получило название гироскопического эффекта. Медленное вращение гироскопа вокруг осиОО' с частотой Ω получило название прецессии гироскопа.
O |
Z |
|
F |
ω |
L |
|
Y |
dφ dL
L + dL
X
O΄
Рис. 6.1. Прецессия гироскопа под действием внешней силы F
Вектор изменения момента импульсаdL = Ldφ, тогда для частоты прецессии Ω можно получить выражение:
47
W = |
M |
. |
(6.2) |
|
|||
|
L |
|
|
Если момент внешних сил связан с силой тяжести mg, частота прецессии
равна
W = |
mgr |
, |
(6.3) |
|
Iw |
||||
|
|
|
где r – плечо силы тяжести.
Задание 1. Измерение момента инерции поворотного столика с гироскопом
Ход работы
1. Разместить на поворотном столе модуль гироскопа. Создать колебательную систему. Для этого через большой шкив вращающегося столика перекинуть короткую нить, концы которой посредством двух пружин прикрепить к штырям на оси нижнего ролика стойки или к зацепу для пружин (см. рис. 3.2 темы «Измерение моментов инерции»).
2. Так же как в теме«Измерение моментов инерции», по периоду
колебаний |
стола определить |
|
момент инерции ненагруженного Iстола0 |
|||
(задание 1), |
а затем момент |
|
инерции стола, |
установленным на нем |
||
гироскопом I1 |
|
|
I T 2 |
|
|
|
|
I |
|
|
|
|
|
|
1 |
= |
0 1 |
, |
(6.4) |
|
|
T 2 |
|||||
|
|
|
|
|
||
|
|
|
|
0 |
|
|
здесь Т0 – период колебаний свободного стола, Т1 – стола с установленным на нем гироскопом. Результаты измерений занести в табл. 6.1.
Задание 2. Определение момента инерции маховика гироскопа Ход работы
1. Для определения момента инерции отдельно маховика гироскопа затормозить стол. Для этого тумблер«Привод, Тормоз» поставить в положение «Тормоз».
2. Намотать нить 5 на шкив радиусаr = 20 мм маховика гироскопа, перекинуть нить через верхний шкив стойки и подвесить к свободному концу нити груз массой m. Схема эксперимента изображена на рис. 6.2.
3.Измерить время опускания груза с высоты h. Для этого:
3.1.Соединить датчик стойки кабелем с любым из разъемов №1 – 4 на верхней панели прибора.
3.2. Переключатель режима измерения поставить в положение «Однокр». Переключатель «1 : 2» в положение «2».
48

1
Рис. 6.2. Схема эксперимента по определению момента инерции маховика гироскопа
4. Перед каждым измерением времени падения необходимо нажать кнопку «Готов» и затем отпустить систему. Датчик интервалов времени,
находящийся на шкиве вертикальной стойки, будет |
фиксировать |
время |
||||||||
поворота шкива на угол4π. Высота h, |
следовательно, |
равна двум |
длинам |
|||||||
окружности шкива стойки (h = 4πr, где r – радиус шкива стойки). |
|
|
||||||||
|
5. Момент инерции маховика (без учета сил трения) можно рассчитать |
|||||||||
по формуле (см. раздел «Определение моментов инерции», задание 1) |
|
|
||||||||
|
|
|
I M = |
mgr2t2 |
|
|
|
|||
|
|
|
|
|
. |
|
|
(6.5) |
||
|
|
|
|
|
|
|||||
|
|
|
|
2h |
|
|
|
|||
Результаты измерений занести в табл. 6.1. |
|
|
|
Таблица 6.1 |
||||||
|
|
|
|
|
|
|
|
|||
Т0 =___, Т1 =______, I1 =_____, |
r =_______, h =________ |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
m, кг |
|
t, c |
|
|
|
Iм, кг·м2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. Определить среднее значение момента инерции и погрешность его определения.
49