

эльмаш
.pdfулучшения магнитной связи между обмотками выполняется по возможности минимальным.
Статор и ротор ИР устроены так же, как статор и ротор асинхронного двигателя. Обмотка ротора соединяется в звезду и выводится на три контактных кольца. На кольцах устанавливаются щетки. В ИР вместо контактных колец для связи с внешней цепью выводы шести концов обмотки ротора выполняются в виде гибких кабелей.
Для охлаждения обмоток статора и ротора на верхнем подшипниковом щите установлен асинхронный двигатель мощностью несколько ватт с вентилятором.
Изображена электромагнитная схема индукционного регулятора и показано образование вращающегося магнитного поля трехфазной обмоткой статора на рис. 3.2. Симметричная трехфазная обмотка, как отмечалось ранее, укладывается в пазы сердечника статора, оси фазных обмоток сдвинуты на 120°. Каждая фаза обмотки статора показана схематически в виде одного витка. Начала фаз обозначены A, B, C, а концы – X, Y, Z. Лобовые части обмоток для простоты не нанесены.
При подключении обмотки статора к трехфазной сети по фазам обмотки потекут трехфазные токи,
временная диаграмма которых показана на рис. 3.3. На временной диаграмме отмечены два момента времени – t1 и t2 , для которых на рис. 3.2, а, б построен вектор результирующего магнитного поля. Для построения вектора результирующего поля на рис. 3.2, а указано направление токов в фазах для момента t1 , а на рис. 3.2, б – для момен-
71
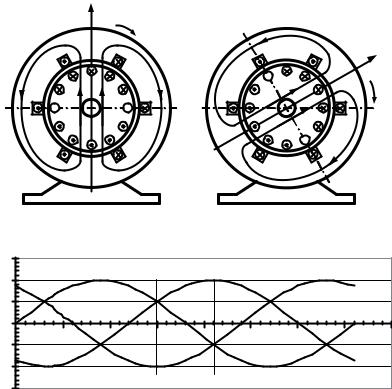
та t2. За положительное направление тока принято направление тока в обмотке статора от начала фазы к концу.
а |
Ф |
|
б |
|
|
n1 |
|
|
|
|
|
|
|
|
|
|
B |
B |
Ф |
Z |
|
Z |
|
|
A |
|
|
A |
n1 |
|
|
|
||
|
|
X |
|
X |
Y |
|
C |
Y |
C |
|
|
|
|
Рис. 3.2. Электромагнитная схема индукционного регулятора
а – для момента времени t1; б – для момента времени t2
1 |
|
i a |
i b |
|
ic |
|
|
|
|
|
|
|
|
|
|
|
|
||
0,5 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
-0,5 |
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
400 |
-1 |
|
|
|
t1 |
|
t2 |
|
|
|
-1,5 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Рис. 3.3. Токи в фазах обмотки статора
В момент времени t1 ток в фазе AX наибольший и отрицательный, т. е. направлен от конца фазы к началу. Токи в фазах BY и CZ положительные, равны друг другу и в два раза меньше по величине тока в фазе AX. В соответствии с таким распределением токов по фазам указано направление силовых линий и вектора результирующего потока. Каждая силовая линия потока сцеплена со всеми катушками, в которых одинаково направлены токи. Следует отметить, что направление вектора результирующего магнитного потока в момент времени t1 совпадает с направлением оси той фазы, в которой ток максимален, в данном случае с осью фазы AX .
72
В момент времени t2 ток в фазе CZ наибольший и положительный, т. е. направлен от начала фазы к концу. Токи в фазах AX и BY отрицательные, равны друг другу и в два раза меньше по величине тока в фазе CZ. Соответствующие направления токов, а также направление силовых линий и вектора результирующего потока указаны на рис. 3.2, б. Из сравнения рис. 3.2, а и 3.2, б видно, что вектор результирующего магнитного потока с течением времени изменяет свое положение в пространстве. Так как число пар полюсов p = 1, сдвиг во времени t1 и t2 на 60 эл. градусов приводит к повороту магнитного поля на 60 геом. град. При этом вектор результирующего потока остается неизменным по величине. Таким образом, создается круговое вращающееся поле, частота вращения которого
n1 = (60 ∙ f1) / p,
где f1 – частота сети; p – число пар полюсов.
В целом следует отметить, что круговое вращающееся поле обладает следующими свойствами:
а) максимум результирующего потока всегда совпадает с осью той фазы, в которой ток максимален;
б) магнитный поток перемещается в сторону той фазы, в которой ожидается ближайший максимум тока, т. е. направление вращения зависит от порядка чередования тока в фазах;
в) для изменения направления вращения потока надо изменить порядок чередования тока в фазах. В трехфазной системе для этого следует поменять местами провода, подводящие ток от сети к двум любым фазам обмотки статора.
Так как рассматривается режим с неподвижным ротором, то вращающееся поле пересекает проводники статора и ротора с одинаковой частотой n1 и наводит в них E1 и E2. Частота указанных ЭДС равна частоте сети f1 . Если считать ЭДС фазы обмоток статора и ротора синусоидальными, то их действующие значения соответственно равны
E1 = 4,44 f1 kw1 W1 Фm;
E2 = 4,44 f1 kw2 W2 Фm,
где f1 – частота сети; W1, W2 – число витков обмоток статора и ротора; Фm – амплитудное значение основного магнитного потока.
73
3.1.3. Принцип действия индукционного регулятора
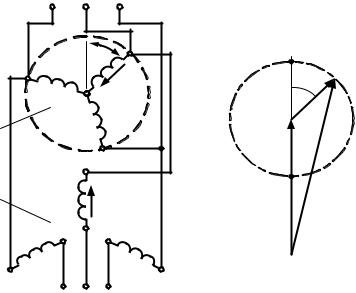
Схема включения обмоток статора и ротора индукционного регулятора приведена на рис. 3.4, а. Из соображений практического удобства первичной стороной чаще всего служит неподвижный ротор, который можно поворачивать при помощи какого-либо поворотного устройства, например червячной передачи, а вторичной – статор, являющийся неподвижным. В принципе первичной обмоткой может быть обмотка статора, а обмотка ротора – вторичной.
|
~Uвх |
|
|
Α |
b |
a |
|
|
|
. |
|
|
|
E1 |
1 |
c |
|
|
|
|
B |
|
|
2 |
. |
|
E2 |
|
|
Y |
Z |
|
X |
|
|
A |
|
C |
~Uвых |
|
|
А1
.
E2
Α 
|
А . |
. |
E1 |
Uвх |
|
А2 .
Uвых
0
Рис. 3.4. Схема и векторная диаграмма напряжений трехфазного индукционного регулятора
Входное напряжение Uвх подводят к началам а в с первичной обмотки, а также к началам А В С вторичной обмотки, т. е. обмотки ста-
тора и ротора в индукционном регуляторе электрически связаны; выходное напряжение Uвых снимают с концов X Y Z вторичной обмотки.
Принцип действия индукционного регулятора состоит в следующем. При питании первичной обмотки ротора трехфазным током
74
создается вращающийся магнитный поток Фm, если соблюдены следующие условия.
1.Число фаз m = 3.
2.Обмотки в пространстве сдвинуты на αгеом = αэл / р
3.Токи в обмотках во времени сдвинуты на αэл = 120 град. Вращающееся магнитное поле в фазах обмоток индукционного
регулятора индуцирует E1 и E2.
Если пренебречь падениями напряжения в сопротивлениях обмотки ротора, то в индукционном регуляторе, как и в трансформаторе
U1 ≈ E1 = 4,44 f1 kw1 W1 Фm.
Следовательно, E1 можно считать постоянной и равной фазному напряжению сети – напряжению на входе Uвх. Приведенное соотношение позволяет сделать вывод: при постоянном напряжении сети U1
и постоянной частоте f1 можно считать, что величина основного магнитного потока Фm постоянна. Величина Е2 зависит от частоты f2 и амплитуды магнитного потока Фт. В индукционном регуляторе ротор неподвижен, поэтому частота ЭДС ротора f2 равна частоте сети f1 и, следовательно, не зависит от режимов работы, в частности, от угла поворота ротора. При постоянном магнитном потоке Фт величину эдс вторичной обмотки E2, как и эдс первичной обмотки E1 можно считать постоянной, не зависящей от угла поворота ротора.
В индукционном регуляторе обмотки статора и ротора связаны электрически, поэтому при холостом ходе напряжение на выходе для каждой фазы индукционного регулятора определяется соотношением:
Úвых = Ė1 + Ė2 = Úвх + Ė2.
Так как все три фазы находятся в одинаковых условиях при правильном включении обмоток ИР, то ниже рассматриваются процессы только в одной из них.
Из соотношения следует, что векторы Úвх и Ė2 складываются геометрически, и поэтому действующее значение выходного напряжения Úвых зависит от угла сдвига фаз α между векторами Úвх и Ė2 (рис. 3.4, б). Предположим, что оси обмоток ротора в пространстве совпадают с осями соответствующих обмоток статора. В этом случае поток Фm набегает на обмотки статора и ротора одновременно и индуцирует в них Ė1 и Ė2, совпадающие по фазе. Поэтому напряжение Uвых в этом случае представляет собой арифметическую сумму Uвх и Е2:
75
Uвых = Umax = Uвх + Е2 = ОА1.
Это положение ротора можно считать исходным и от него вести отсчет углов. Повернем ротор на угол α = ±180 / р, геом. град, получим
Uвых = Umin = Uвх – Е2 = ОА2.
Это положение ротора можно назвать вторым основным положением.
В общем случае ротор можно повернуть на любой угол. Повернем ротор на угол α по направлению вращения магнитного потока. Неизменный по величине поток Фт набегает сначала на обмотку статора, а затем на обмотку ротора, смещенную на угол α относительно неподвижной обмотки статора. Поэтому вектор Е2, не изменяясь по величине, поворачивается тоже на угол α. Очевидно, что геометрическое место концов вектора Е2, а следовательно, и вектора напряжения Uвых при изменении угла α есть круг, описанный из центра – точки А, соответствующей концу вектора Uвх, радиусом АА1 = Е2.
Как видно из рис. 3.4, б, изменяя угол α при повороте ротора, можно получать различные величины выходного напряжения. При этом одновременно с изменением величины выходного напряжения изменяется и его фаза.
Достоинством индукционного регулятора является возможность плавного изменения напряжения под нагрузкой (без разрыва цепи нагрузки).
При неправильном включении две фазы обмотки статора или ротора перепутаны. Симметрия как фазных, так и линейных напряжений на выходе ИР нарушается. Поэтому векторную диаграмму при неправильном включении обмоток, в отличие от векторной диаграммы, приведенной на рис. 3.4, б, необходимо строить для трех фаз.
3.2. Лабораторная работа 5. Испытание индукционного регулятора
Цель работы
Ознакомиться с назначением, конструкцией, особенностями электромагнитных процессов и принципом работы индукционного регулятора, снять зависимости выходного напряжения индукционного регулятора от угла поворота ротора U2 = f (α ) при правильной и неправильной схемах включения обмоток статора и ротора.
76
Объект и средства исследования
В работе исследуется трехфазный индукционный регулятор. Электрическая схема ИР при правильном и неправильном включении приведена на рис. 3.5. Номинальные данные ИР приведены на стенде. При выполнении работы необходимо пользоваться вольтметром с пределами измерения до 600 В.
Рабочее задание
Снять зависимость вторичного напряжения U2 от угла поворота ротора α при правильном и неправильном включении обмоток в режиме холостого хода индукционного регулятора (Zнаг = ∞).
Определить коэффициент трансформации ИР.
Построить в одних и тех же координатных осях экспериментальные зависимости U2л = f (αэл°) для правильной и неправильной схем соединения обмоток ИР.
Используя векторную диаграмму ИР при правильном включении, построить зависимость U2л = f (αэл°) и сравнить ее с опытной кривой, построенной в тех же координатах.
Построить векторную диаграмму ИР при неправильном включении.
Методические рекомендации к выполнению рабочего задания
иобработке результатов эксперимента
1.Ознакомиться с устройством лабораторного стенда, конструкцией испытуемого индукционного регулятора, записать его номинальные данные и подобрать соответствующие измерительные приборы.
2.Собрать схему ИР (рис. 3.5). В качестве первичной обмотки регулятора можно использовать обмотку как статора, так и ротора.
3.Установить, какие градусы − геометрические или электрические − указаны на шкале для отсчета углов α. Связь между электрическими и геометрическими градусами определяется соотношением
α°эл = рα°геом ,
где р – число пар полюсов.
4. Проверить симметрию напряжений U1л – на входе и U2л – на выходе. При правильном включении обмоток ИР и симметричном напряжении на входе напряжения на выходе должны быть симметричны т. е. равны между собой (UАB = UBC = UCА).
77
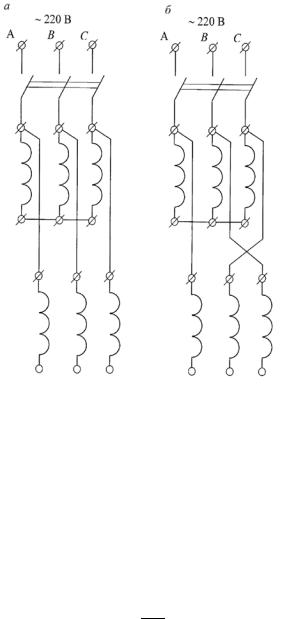
Рис. 3.5. Схемы индукционного регулятора:
а− правильное включение, б − неправильное включение
5.При правильном включении обмоток установить ротор в крайнее положение. Поворачивая ротор от одного крайнего положения до другого, замерить напряжение U2л через 20°эл.
6.При неправильном включении обмоток ИР выходные напряжения регулятора несимметричны и следует измерять три линейных напряжения на выходе ИР UАB, UBC , UCА при каждом положении ротора.
7.Для определения коэффициента трансформации нужно замерить фазные эдс первичной и вторичной обмоток при любом положении ротора. Коэффициент трансформации определить как отношение фазных эдс первичной и вторичной обмоток:
kтр = Е1ô .
Е2ô
78

8. Используя величину измеренных фазных эдс Е1ф и Е2ф, построить векторные диаграммы. Для правильного включения векторную диаграмму можно построить для одной фазы. При различных углах α определить величину U2ф. При построении зависимости U2л = f(αэл°) следует учесть, что в симметричной системе U2л = 3U2ф.
Для неправильного включения векторную диаграмму для трех фаз можно построить для одного угла α.
Контрольные вопросы
1.Назначение, устройство, схема соединения обмоток ИР.
2.Принцип действия индукционного регулятора. Условия создания вращающегося магнитного поля.
3.Построение и обоснование векторной диаграммы индукционного регулятора в режиме холостого хода при правильном включении обмоток.
4.Построение и обоснование векторной диаграммы индукционного регулятора в режиме холостого хода при неправильном включении обмоток.
5.Почему величина Е2ф не зависит от угла поворота ротора?
6.Сформулируйте условие, при котором минимальное напряжение на выходе регулятора при правильном включении обмоток равно нулю.
7.Назначение и принцип работы фазорегулятора.
79
4.Машины постоянного тока
4.1.Основные теоретические положения
4.1.1.Область применения машин постоянного тока
На современных электрических станциях практически генерируется электрическая энергия только трехфазного переменного тока. Значительная часть этой энергии используется в той же форме переменного тока в промышленности и для
бытовых нужд.
Но в ряде случаев по условиям производства необходим или предпочтительнее постоянный ток:
–для питания двигателей постоянного тока в стационарных и передвижных установках;
–для возбудителей синхронных машин;
–для зарядки аккумуляторных батарей;
–для питания электролизных и гальванических ванн;
–при сварке дугой;
–для энергоснабжения различных потребителей на автомобилях и самолетах, в пассажирских вагонах, электровозах и тепловозах.
Все электрические машины, в том числе и машины постоянного тока, обратимы, т. е. могут работать как в генераторном, так и в двигательном режиме.
В генераторах постоянного тока (ГПТ) механическая энергия, подведенная к валу машины первичным двигателем, преобразуется в электрическую. ГПТ – источники постоянного тока.
Двигатели постоянного тока (ДПТ) потребляют из сети постоянного тока электрическую энергию, преобразуют электрическую энергию в механическую и приводят в движение рабочий механизм.
80