

umm_465
.pdfКОЛЕСНАЯ
ПАРА
Rк |
|
Fк |
|
Ек |
Нагрузка на ось. |
|
Сопротивление |
|
Целостность |
Тип оси. |
|
качению. |
|
оси, колес. |
Тип буксового уз- |
|
Параметры из- |
|
Твердость по- |
ла. |
|
вилистого каче- |
|
верхности ката- |
Диаметр колес. |
|
ния колесной |
|
ния. |
Расстояние между |
|
пары. |
|
Плотность по- |
колесами. |
|
|
|
садки колес. |
Уклон (конус- |
|
|
|
Величины из- |
|
||||
ность) поверхно- |
|
|
|
носов поверх- |
сти катания. |
|
|
|
ности катания и |
|
|
|
|
гребня колеса. |
|
|
|
|
Дефекты на по- |
|
|
|
|
верхности ката- |
|
|
|
|
ния колеса. |
|
|
|
|
(ползуны, нава- |
|
|
|
|
ры, выщерби- |
|
|
|
|
ны, отколы). |
|
|
|
|
|
Vк
Отзвук простукивания колеса.
Виброускорение рельса.
Виброакустические колебания.
Деформация шейки рельса.
Скольжение колеса по рельсу (юз).
Изменение положения вершины гребня колеса относительно рельса по высоте при скорости до 40-60
км/ч. Отрыв (потеря контакта колеса с рельсом при высокой скорости движения >
60 км/ч.
Интенсивность изнашивания гребня. Следы сдвига ступицы колеса относительно оси.
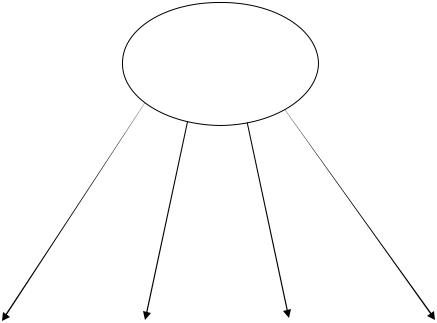
Рис 6.4. Диагностическая модель колесной пары
60
ТЕЛЕЖКА
Rт |
|
|
|
Ет |
|
Vт |
|
Fт |
|
|
|||
Грузоподъемность. |
|
Амплитуда и |
|
Целостность |
|
Перераспределение |
Масса тележки. |
|
частота колеба- |
|
элементов ра- |
|
нагрузки на колеса |
Масса необрессо- |
|
ний вагона. |
|
мы, рессорного |
|
колесной пары. |
ренных частей. |
|
Сопротивление |
|
подвешивания |
|
Уровень рамных сил |
База тележки. |
|
движению. |
|
и тормозной |
|
при вписывании в |
Характеристика |
|
Сопротивление |
|
рычажной пе- |
|
кривые. |
связей элементов |
|
вращению ко- |
|
редачи. |
|
Уровень шума и виб- |
рамы тележки. |
|
лесной пары в |
|
Непараллель- |
|
раций. |
Прогиб рессор. |
|
кривых участках |
|
ность, перекос |
|
Интенсивность из- |
Жесткость рессор. |
|
пути. |
|
осей колесных |
|
нашивания гребней |
Характеристики |
|
Положение |
|
пар. |
|
колес. |
демпфирования. |
|
фрикционного |
|
Взаимное по- |
|
Угол набегания коле- |
Коэффициент ди- |
|
клина относи- |
|
ложение эле- |
|
са на рельс (угол ата- |
намики. |
|
тельно надрес- |
|
ментов рамы, |
|
ки). |
Показатель плав- |
|
сорной балки. |
|
скользунов, |
|
|
ности хода. |
|
|
|
рессор. |
|
|
|
|
|
|
|||
|
|
|
|
Нарушение га- |
|
|
|
|
|
|
|
||
|
|
|
|
барита подвиж- |
|
|
|
|
|
|
ного состава. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис 6.5. Диагностическая модель тележки
61
АВТОСЦЕПНОЕ
УСТРОЙСТВО
Rас |
|
Fас |
|
Еас |
|
Vас |
Характеристика |
|
Взаимное поло- |
|
Целостность |
|
Выход головки авто- |
относительного |
|
жение деталей |
|
деталей авто- |
|
сцепки. |
вертикального пе- |
|
механизма авто- |
|
сцепного уст- |
|
|
|
|
|
||||
ремещения (жест- |
|
сцепки. |
|
ройства. |
|
|
кая, нежесткая). |
|
Зазоры в упряж- |
|
Зазоры в конту- |
|
|
Тип поглощающе- |
|
ном устройстве. |
|
ре сцепления. |
|
|
го аппарата. |
|
Контрольные |
|
|
|
|
|
|
|
|
|||
Энергоемкость по- |
|
размеры в эле- |
|
|
|
|
глощающего аппа- |
|
ментах зацепле- |
|
|
|
|
рата. |
|
ния. |
|
|
|
|
Силовая характе- |
|
|
|
|
|
|
|
|
|
|
|
||
ристика погло- |
|
|
|
|
|
|
щающего аппара- |
|
|
|
|
|
|
та. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис 6.6. Диагностическая модель автосцепного устройства
Техническое состояние автотормоза вагона нельзя рассматривать (определять) отдельно от автотормозной системы поезда, которая включает компрессорный агрегат, главные резервуары, кран машиниста локомотива, соединенную через концевые краны тормозную воздушную, а для электропневматического тормоза и электрическую магистрали поезда, автотормозное оборудование каждого вагона, включающее подводящие трубки, разобщительные краны, воздухораспределитель, тормозной цилиндр, запасный резервуар, авторежим и тормозную рычажную передачу.
Правильность функционирования всей этой системы определяется техническим состоянием всех перечисленных элементов системы на каждом вагоне.
62

Поэтому на рис. 6.7 представлена диагностическая модель автотормозной системы всего поезда
АВТОТОРМОЗНАЯ СИСТЕМА ПОЕЗДА
Rат |
|
Fат |
|
Еат |
|
Vат |
Тормозной ко- |
|
Тормозная сила. |
|
Целостность |
|
Замедление поез- |
эффициент. |
|
Сила нажатия тормоз- |
|
воздушной. |
|
да при контроль- |
Коэффициент |
|
ных колодок. |
|
тормозной ма- |
|
ном торможении |
сцепления коле- |
|
Расход воздуха через |
|
гистрали. |
|
на заданном про- |
са с рельсом. |
|
кран машиниста. |
|
Плотность воз- |
|
филе пути. |
Зарядное давле- |
|
Производная расхода |
|
душной тор- |
|
Скольжение ко- |
ние. |
|
по времени. |
|
мозной сети. |
|
леса по рельсу. |
Мягкость возду- |
|
Производная давления |
|
Целостность |
|
Температура сту- |
хораспределите- |
|
по времени. |
|
деталей тор- |
|
пицы и обода ко- |
ля. |
|
Величина давления |
|
мозной рычаж- |
|
леса. |
Режимы возду- |
|
воздуха в магистрали |
|
ной передачи. |
|
Температура в |
хораспределите- |
|
хвостового вагона. |
|
Положение |
|
зоне контакта ко- |
ля. |
|
Ход штока тормозного |
|
тормозного |
|
леса с рельсом. |
|
|
цилиндра. |
|
башмака и тор- |
|
Дефекты на по- |
|
|
Зазор между вилкой |
|
мозной колод- |
|
верхности ката- |
|
|
авторежима и балоч- |
|
ки. |
|
ния колес. |
|
|
кой на порожнем ва- |
|
Нарушение |
|
Звуковые колеба- |
|
|
гоне. |
|
нижнего габа- |
|
ния от утечек |
|
|
Контрольные размеры |
|
рита подвижно- |
|
сжатого воздуха. |
|
|
а и А регулятора ры- |
|
го состава. |
|
|
|
|
чажной передачи. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Чувствительность |
|
|
|
|
|
|
(время срабатывания) |
|
|
|
|
|
|
воздухораспределите- |
|
|
|
|
|
|
ля на торможение и |
|
|
|
|
|
|
отпуск. |
|
|
|
|
|
|
|
|
|
|
|
Рис 6.7. Диагностическая модель автотормозной системы поезда
Рассмотренные диагностические модели являются общими для всех типов вагонов и не претендуют на полноту всех видов параметров, а дают общее представление о возможности технического диагностирования. Следует отметить, что для каждого типа вагона диагностическая модель кузова будет иметь существенные различия.
63
Часть характеристик R и все параметры F,E,V, приведенные в диагностических моделях, могут быть использованы в качестве диагностических параметров, т. е. образуют рабочее диагностическое пространство, а затем, естественно, возникает проблема их измерения, оценки и обнаружения признаков. Только после этого можно проводить диагностирование как решение задачи обработки значений полученных параметров и их соответствия определенной оценке состояния вагона или его сборочных единиц.
Вопросы для самоподготовки
1. Дайте оценку информативности взаимосвязанных систем грузового ва-
гона.
2.Какие характеристики вагона могут быть использованы в качестве диагностических параметров?
3.Что относится к параметрам процесса функционирования вагона?
4.Что относится к структурным параметрам вагона?
5.К какому классу параметров относятся дефекты?
6.Какие характеристики автосцепного устройства могут быть использованы в качестве диагностических параметров?
7.Какие характеристики автотормозной системы могут быть использованы в качестве диагностических параметров?
8.Какие параметры функционирования определяют целостность воздушной тормозной магистрали?
9.Какие параметры функционирования определяют тормозной коэффициент поезда?
10.Какие структурные параметры колесной пары можно оценить по виброускорению рельса?
64
7. МЕТОДЫ ИЗМЕРЕНИЙ ДИАГНОСТИЧЕСКИХ ПАРАМЕТРОВ
7.1. Классификация диагностических параметров
По виду физических параметров диагностирования СТД разделяются на несколько групп. В вагонном хозяйстве применяют в основном СТД, в которых измеряют следующие параметры:
кинематические (время, скорость, ускорение, период, частота периодического процесса, колебания или вибрации);
геометрические (расстояние, размер, площадь, объем, угол); статические и динамические (сила, масса, импульс силы, давление, мо-
мент силы, коэффициент трения, работа); механические свойства (плотность, твердость, ударная вязкость); тепловые (температура, теплопроводность);
акустические (звуковое давление, частота звука, громкость звука, акустическое сопротивление);
электрические и магнитные (ток, напряжение, электрическое сопротивление, частота тока, фаза, напряженность магнитного поля, магнитная индукция, намагниченность);
оптические (поток инфракрасного излучения, коэффициент отражения, волоконная оптика, голография).
Основой всех методов измерений являются различные преобразователи одного вида параметра в другой, удобный для наблюдения, автоматизации измерений и регистрации. Наибольшее распространение получили преобразователи различных неэлектрических параметров в электрические.
7.2. Характеристики преобразователей
Преобразователь – это прибор, который преобразует одну форму энергии в другую. Преобразователь является первым звеном системы измерения и расположен на объекте диагностирования, либо в месте доступном для обнаружения диагностического параметра (звука, теплового излучения и др.). Имеются два основных типа преобразователей: активный и пассивный. Активный преобразователь непосредственно преобразует один вид энергии в другой и не нуждается во внешнем источнике энергии. Примером такого преобразователя может быть пьезоэлемент или термопара. Пассивный преобразователь управляет энергией, поступающей от другого источника, например потенциометр.
Сигнал преобразователя поступает на согласующее устройство, в котором он формируется в соответствии с требованиями выходного регистрирующего устройства. При выборе преобразователя для конкретных условий применения необходимо учитывать его характеристики. Основными характеристиками преобразователя являются:
чувствительность – отношение выходного сигнала (В,А) к уровню возбуждения (входному, измеряемому параметру);
65

разрешение – наименьшее изменение параметра, которое может быть измерено (определено);
воспроизводимость – оценка результатов измерения одной и той же величины параметра;
динамическая характеристика – постоянная времени, это время, необходимое преобразователю для того, чтобы достичь 63% уровня ступенчатого изменения входного сигнала.
Другие факторы, которые следует учитывать при выборе преобразователя
– это требования к уровню возбуждения на входе и параметрам выходного сигнала, так как они должны соответствовать характеристикам электрического измерительного прибора.
В табл. 7.1 представлены различные типы преобразователей механических параметров в электрические. В ряде случаев требуются силовые элементы для первичного преобразования силы, давления, ускорения в параметры перемещения или положения.
Таблица 7.1
Преобразователи механических параметров в электрические
Тип преобразо- |
|
Механические параметры |
|
|||
вателя |
|
|
|
|
|
|
|
Давление |
Переме- |
Положе- |
Ско- |
Ускоре- |
Вибра- |
|
(сила) |
щение |
ние |
рость |
ние |
ция |
Тензометр сопро- |
+ |
|
|
|
+ |
+ |
тивления |
|
|
|
|
|
|
Потенциометр, |
+ |
+ |
+ |
|
|
|
Резистивный пре- |
|
|
|
|
|
|
образователь |
|
|
|
|
|
|
Индуктивный |
+ |
+ |
+ |
+ |
+ |
+ |
|
|
|
|
|
|
|
Линейный диф- |
|
+ |
+ |
|
|
|
ференциальный |
|
|
|
|
|
|
трансформатор |
|
|
|
|
|
|
Емкостной |
+ |
+ |
+ |
+ |
+ |
+ |
|
|
|
|
|
|
|
Вихретоковый |
|
+ |
+ |
+ |
|
|
|
|
|
|
|
|
|
Пьезоэлектриче- |
+ |
|
|
|
+ |
+ |
ский |
|
|
|
|
|
|
Магниторезистор |
|
+ |
+ |
+ |
|
|
|
|
|
|
|
|
|
Датчик Холла |
|
+ |
+ |
+ |
|
|
|
|
|
|
|
|
|
66
7.3. Измерение деформаций с помощью тензодатчиков
Силу, напряжение, давление, крутящий момент, воздействующие на конструкцию можно определить, измерив с помощью тензодатчиков деформацию и зная упругие свойства материала. Принцип действия тензодатчиков основан на изменении электрического сопротивления материала при его деформации. Удлинение проволочки, наклеенной на исследуемый объект при его деформации (растяжении) сопровождается изменением ее электрического сопротивления.
Тензодатчики выполняются из тонкой проволоки, фольги и полупроводников. Коэффициент чувствительности тензодатчика определяется по формуле
k = |
δR / R |
|
δL / L , |
(7.1) |
где R – сопротивление датчика;
δ R – изменение сопротивления;
L– длина (база) датчика;
δL – изменение длины;
ε=δ L / L – относительная деформация.
Полупроводниковые тензодатчики имеют чувствительность в 50-60 раз выше проволочных.
7.4. Индуктивные преобразователи
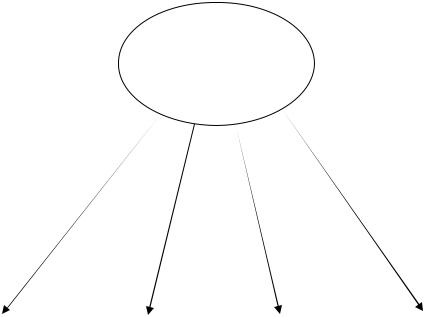
Принцип действия индуктивного преобразователя основан на изменении индуктивного сопротивления xL= ω L, где ω = 2πƒ – угловая частота; L – индуктивность. Единица измерения индуктивности Генри – индуктивность контура, в котором при равномерном изменении тока 1 А/с возникает ЭДС самоиндукции 1 В. Индуктивный преобразователь представляет собой катушку индуктивности с сердечником, который имеет подвижный элемент (якорь), соединенный с измеряемым объектом, в качестве якоря может быть использована ферромагнитная диафрагма (рис. 7.1). Если катушку индуктивности с сердечником и якорь закрепить на взаимно смещающихся частях механизма, то при изменении воздушного зазора δ (при перемещении якоря), изменяется индуктивное сопротивление магнитопровода и, следовательно, индуктивность катушки L (рис. 7.1 а) , Для катушки с сердечником
L = |
U |
= |
w2 s |
μa , μa = |
B |
м |
, |
(7.2) |
ωI |
l |
|
|
|||||
|
|
|
H м |
|
||||
где U – синусоидальное напряжение с частотой f; I – действующий ток;
w – число витков катушки;
67
s – площадь поперечного сечения сердечника; μа – магнитная проницаемость цепи; Вм – магнитная индукция; Нм – напряженность магнитного поля.
|
|
1 |
а |
1 |
б |
|
U |
2 |
|
2 |
|
|
|
 δ
δ
3
Рис. 7.1. Индуктивные преобразователи: а – с подвижным якорем; б – с подвижным сердечником; 1 – катушка; 2 – сердечник; 3 – якорь.
В других вариантах для измерения большего диапазона перемещений сердечник катушки индуктивности, соединенный с силовым органом, перемещается внутри катушки, изменяя ее индуктивность (рис. 7.1 б). Для измерения перемещения катушки включают в измерительную схему переменного тока. Катушки обычно питаются от источника тока высокой частоты (5 – 70 МГц).
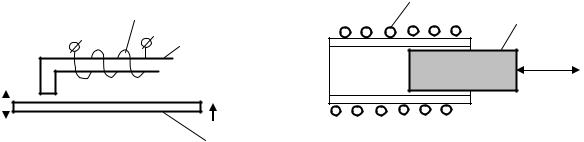
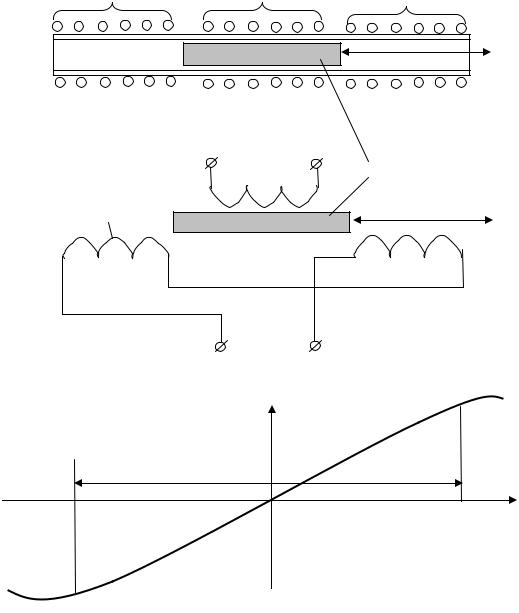
С целью повышения чувствительности, помехозащищенности и обеспечения линейности выходного сигнала применяют линейные дифференциальные трансформаторы с пределами измерений от 0,1 до 300 мм. Вторичные обмотки линейного дифференциального трансформатора включены последовательно в противофазе. На рис. 7.2 представлены устройство, принципиальная электрическая схема и характеристика линейного дифференциального трансформатора.
7.5. Емкостные преобразователи
Принцип работы емкостного преобразователя основан на изменении емкостного сопротивления
xC = |
1 |
= |
1 |
, |
(7.3) |
|
ω C |
2π f C |
|||||
|
|
|
|
где ω = 2πƒ – угловая частота;
С – емкость конденсатора, С=ε0εr(n-1)A/d ε0 – диэлектрическая проницаемость вакуума;
εr - диэлектрическая проницаемость диэлектрика; n – число пластин;
А – площадь одной стороны пластины; d – толщина диэлектрика.
68
2 |
1 |
2 |
а
Uвх
1 |
3 |
|
б 2
2
Uвых
Uвых
в
Линейный участок |
x |
Рис. 7.2. Линейный дифференциальный трансформатор: а – устройство;
б– принципиальная электрическая схема; в – характеристика
Впреобразователе емкостное сопротивление определяется емкостью конденсатора, которая изменяется при изменении расстояния δ между пластинами, соединенными с перемещающимися деталями объекта (рис. 7.3 а). Такой тип преобразователя применяется для малых перемещений в пределах до 1 мм и имеет нелинейную характеристику. Для преобразования больших перемещений используют поперечное смещение пластин, при котором изменяется эффективная площадь (перекрытие) пластин S (рис. 7.3 б), при этом обеспечивается линейность характеристики преобразователя. Другой тип линейного преобразова-
теля основан на изменении диэлектрической проницаемости εr путем перемещения между пластинами диэлектрика (рис. 7.3 в).
69