

4.2.2 Розв’язання з допомогою рядів Тейлора
Цей метод теоретично годиться для розв’язання будь-яких диференціальних рівнянь, але на практиці не застосовується, оскільки вимагає обчислення частинних похідних, що не тільки незручно, але і почасти неможливо.
Розклад
функції
![]() в ряд Тейлора в околі точки
в ряд Тейлора в околі точки![]() записується у вигляді
записується у вигляді
 (6.4)
(6.4)
Якщо
вважати, що знайдені наближені розв’язки
рівняння в точках
![]() розташованих на деякій відстані
розташованих на деякій відстані![]() одна від одної, то можна знайти наближений
розв’язок
для точки
одна від одної, то можна знайти наближений
розв’язок
для точки
![]() ,
підставивши у формулу (6.4) значення
,
підставивши у формулу (6.4) значення![]() :
:
 .
(6.5)
.
(6.5)
Чим
більше членів ряду взято для обчислень,
тим точніше буде наближення. З точки
зору практичних обчислень метод
незручний, оскільки вимагає знаходження
різних похідних функції
![]() .
Проте він надає деякий критерій оцінки
різноманітних практично застосовуваних
методів – наскільки вони узгоджуються
з методом Тейлора. Наприклад, деякі
методи узгоджуються до членів порядку
.
Проте він надає деякий критерій оцінки
різноманітних практично застосовуваних
методів – наскільки вони узгоджуються
з методом Тейлора. Наприклад, деякі
методи узгоджуються до членів порядку![]() ,
інші – аж до членів
,
інші – аж до членів![]() і т.д.
і т.д.
6.1.2 Методи Рунге-Кутта
Методи Рунге-Кутта в практиці чисельного розв’язання диференціальних рівнянь застосовуються найбільш часто. Вони володіють такими відрізняючими властивостями:
1)
одноступеневі, тобто для знаходження
![]() потрібна інформація тільки про попередню
точку (
потрібна інформація тільки про попередню
точку (![]() );
);![]()
2)
узгоджуються з рядом Тейлора аж до
членів порядку
![]() ,
де степіньр
різна для різних методів і визначає
порядок методу, тобто його точність;
,
де степіньр
різна для різних методів і визначає
порядок методу, тобто його точність;
3)
не потребує обчислення похідних від
![]() .
.
Відкинемо
в (6.5) члени ряду, що містять
![]() і т.д., тоді
і т.д., тоді![]() .
Оскільки
.
Оскільки![]() ,
то отримаємо формулу Ейлера (Рунге-Кутта
першого порядку):
,
то отримаємо формулу Ейлера (Рунге-Кутта
першого порядку):
![]() .
(6.6)
.
(6.6)
Метод Ейлера (Рунге-Кутта першого порядку) пояснюється рис. 6.1.
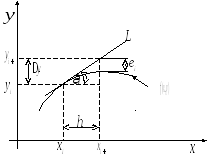
Рисунок 6.1 – Геометрична інтерпретація методу Ейлера
На
рис.6.1 крива
![]() уявляє собою точне, але, звичайно,
невідоме рішення рівняння. Припустимо
тільки, що нам відоме розташування точки
(
уявляє собою точне, але, звичайно,
невідоме рішення рівняння. Припустимо
тільки, що нам відоме розташування точки
(![]() )
на
цієї кривої. Через дану точку проводими
пряму L
з
тангенсом кута нахилу
)
на
цієї кривої. Через дану точку проводими
пряму L
з
тангенсом кута нахилу
![]() .
Рівняння цієї прямої можна записати у
вигляді:
.
Рівняння цієї прямої можна записати у
вигляді:
![]() .
.
Наступною
точкою рішення можна вважати ту, в якій
пряма
![]() перетне пряму
L:
перетне пряму
L:
![]() ,
,
або
![]() .
(6.7)
.
(6.7)
Формула
(6.7), як бачимо, повторює (6.6), тобто є
формулою Ейлера. Помилка методу Ейлера
![]() зображена
на рис.6.1 і зумовлена обмеженням ряду
Тейлора (6.5), починаючи з члена другого
порядку, тобто:
зображена
на рис.6.1 і зумовлена обмеженням ряду
Тейлора (6.5), починаючи з члена другого
порядку, тобто:
![]() ,
,
де k – коефіцієнт пропорціональності.
Очевидно,
описаний на рис.6.1 процес можна
розповсюдити на знаходження
![]() і т. д. точок, послідовність яких дасть
наближене рішення рівняння. Схема
алгоритма рішення диференціального
рівняння методом Рунге-Кутта першого
порядку наведена на рис. 6.2.
і т. д. точок, послідовність яких дасть
наближене рішення рівняння. Схема
алгоритма рішення диференціального
рівняння методом Рунге-Кутта першого
порядку наведена на рис. 6.2.
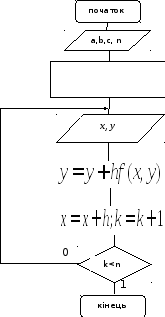
Рисунок 6.2 – Схема алгоритма рішення диференціального рівняння методом Ейлера
Модифікований
метод Ейлера (метод Рунге-Кутта другого
порядку).
Відкинемо в (14.4) члени ряду, що містять
![]() і т.д., тоді
і т.д., тоді![]() .
(6.8)
.
(6.8)
Щоб
зберегти член ряду, що містить
![]() ,
треба визначити другу похіднуy"(xi).
Її можна апроксимувати розділеною
різницею 2-го порядку
,
треба визначити другу похіднуy"(xi).
Її можна апроксимувати розділеною
різницею 2-го порядку
![]()
Підставляючи цей вираз в ((4.17)), отримаємо
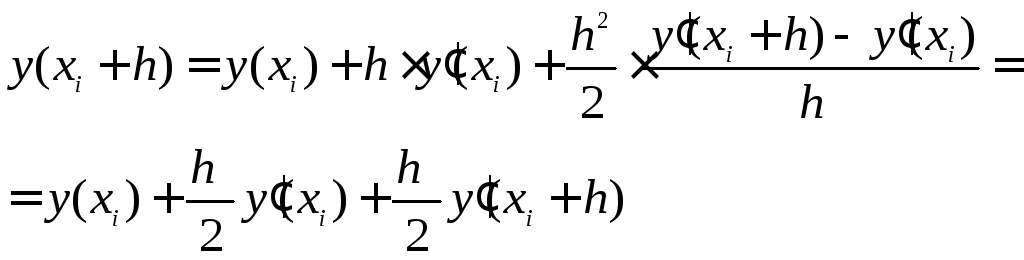
Остаточно, модифікована або уточнена формула Ейлера має вигляд:
![]() .
(6.9)
.
(6.9)
Як
видно, для визначення функції y(x)
в точці i+1
необхідно знати значення правої частини
диференціального рівняння
![]() в
цій точці, для визначення якої необхідно
знати попереднє значення
в
цій точці, для визначення якої необхідно
знати попереднє значення![]() .
.
Для
визначення попереднього значення ![]() скористаємося формулою Ейлера. Тоді
всі обчислення на кожному кроці за
модифікованою або уточненою формулою
Ейлера будемо виконувати в два етапи:
скористаємося формулою Ейлера. Тоді
всі обчислення на кожному кроці за
модифікованою або уточненою формулою
Ейлера будемо виконувати в два етапи:
На
першому етапі обчислюємо попереднє
значення
![]() за формулою Ейлера
за формулою Ейлера
![]() (6.10)
(6.10)
На
другому етапі уточнюємо значення
![]() за модифікованою або уточненою формулою
Ейлера
за модифікованою або уточненою формулою
Ейлера
![]() ,
(6.11)
,
(6.11)
або
![]() (6.12)
(6.12)
Остаточно
для рішення диференціального рівняння
методом Рунге-Кутта другого порядку
використовуються формула (6.11) або (6.12).
При використанні формули (6.11) алгоритм
обчислення чергової точки рішення
реалізують в два етапи: спочатку за
формулою (6.10) обчислюють прогнозне
значення точки ![]() ,
а потім за формулою (6.11) обчислюють
остаточне знаближене значення функції
,
а потім за формулою (6.11) обчислюють
остаточне знаближене значення функції
![]() в точці
в точці![]() .
Формула
(6.12) дає можливість обчислити значення
чергової ординати за один крок.
.
Формула
(6.12) дає можливість обчислити значення
чергової ординати за один крок.
Точність
методу визначається відкинутими членами
ряду Тейлора (6.5), тобто
![]() .
.
Розглянемо геометричний зміст модифікованого методу Ейлера (рис.6.3).

Рисунок 6.3 – Геометрична інтерпретація методу Рунге-Кутта другого порядку
Оскільки
![]() ,
,![]() ,
то модифіковану формулу Ейлера можна
подати у вигляді
,
то модифіковану формулу Ейлера можна
подати у вигляді
![]() ,
,
де
![]() -тангенс
кута нахилу дотичної до шуканої функції
у(х)
в початковій точці кожного кроку,
-тангенс
кута нахилу дотичної до шуканої функції
у(х)
в початковій точці кожного кроку, ![]() -тангенс
кута нахилу дотичної до шуканої функції
у(х)
в кінцевій точці кожного кроку.
-тангенс
кута нахилу дотичної до шуканої функції
у(х)
в кінцевій точці кожного кроку.
На рисунку 6.3 використані такі позначення:
P1 - накопичена помилка в (i+1)-й точці за методом Ейлера,
P2 - накопичена помилка в (i+1)-й точці за модифікованим методом Ейлера.
Як
видно з рис.6.3,
в першій половині кожного кроку, тобто
на ділянці![]() ,
шукана функціяy(x)
апроксимується прямою, яка виходить з
точки
,
шукана функціяy(x)
апроксимується прямою, яка виходить з
точки
![]() під кутом, тангенс якого
під кутом, тангенс якого
![]()
У
другій половині цього ж кроку, тобто на
ділянці
![]() ,
шукана функція y(x)
апроксимується прямою, яка виходить з
точки з координатами
,
шукана функція y(x)
апроксимується прямою, яка виходить з
точки з координатами
![]() під кутом, тангенс якого
під кутом, тангенс якого![]()
У результаті в модифікованому методі Ейлера функція у(х) на кожному кроці апроксимується не однією прямою, а двома.
Схема алгоритма розв’язання диференціального рівняння методом Рунге-Кутта другого порядку наведена на рис. 6.4. В алгоритмі використовуються такі позначення:
![]() права
частина конкретного диференціального
рівняння
права
частина конкретного диференціального
рівняння
![]() ;
;
![]() початкові
умови;
початкові
умови;
![]() інтервал
зміни незалежної величини х;
інтервал
зміни незалежної величини х;
n – число кроків в розв’язанні;
k – лічильник кількості кроків.
Методи Рунге-Кутта третього і четвертого порядків можна вивести аналогічно методам першого і другого порядків. Але їх графічні інтерпретації не мають такої наглядності, як в попередніх двох випадках, тому наведемо кінцеві співвідношення, що описують дані методи.
Метод
Рунге-Кутта третього порядку узгоджується
з розкладом в ряд Тейлора аж до членів
![]() і описується системою чотирьох
співвідношень:
і описується системою чотирьох
співвідношень:
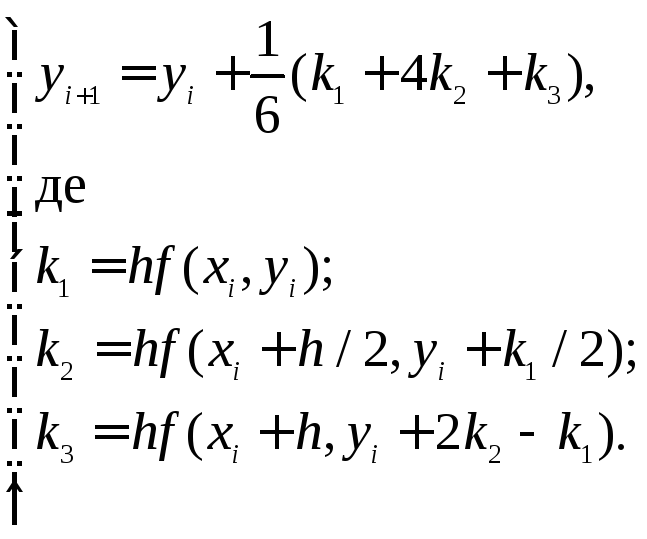 (6.13)
(6.13)
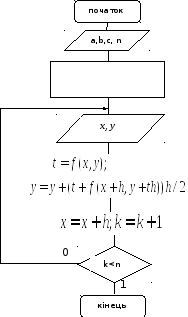
Рисунок 6.4 - Схема алгоритма Рунге-Кутта другого порядку
Метод Рунге-Кутта четвертого порядку описується системою п’яти співвідношень:
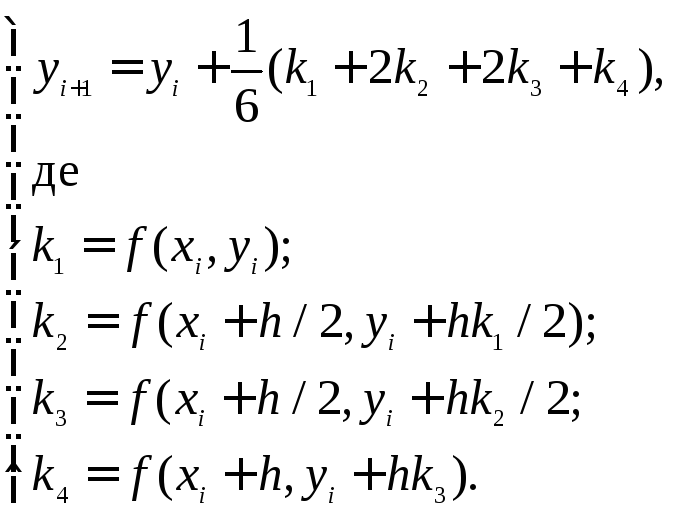 (6.14)
(6.14)