

Технические данные устройства:
Тип системы управления – цикловая;
Число управляемых звеньев до 6;
Количество звеньев, управляемых по путевому принципу – 4;
Количество звеньев, управляемых по путевому и временному принципам – 2;
Количество технологических команд – 6;
Количество блокировок до 4;
Количество программных выдержек - 1;
Диапазон программируемой выдержки времени от 0…0,7 с.;
Количество кадров программы до 30.
Параметры сигналов управления электропневмоклапанами:
Напряжение постоянного тока 24 В.
Ток до 0,4 А.
Напряжение питания датчиков – 24 В.
Напряжение питания устройства 220 В.
Потребляемая мощность 0,2 кВА.
Элементная база – интегральные микросхемы серии К155. Масса 26 кг.
Устройство и принцип работы ЭЦПУ 6030
У стройство
управления построено по принципу
синхронного программного автомата с
жестким циклом управления.
стройство
управления построено по принципу
синхронного программного автомата с
жестким циклом управления.
Блок управленияпредназначен для обработки информации по заданной программе и выдаче управляющих воздействий на манипулятор и технологическое оборудование.
Пульт управленияобеспечивает задание режимов работы устройства и ручное управление звеньями манипулятора.
Программоносительпредназначен для набора и хранения требуемой программы работы робота.
Блок усилителейобеспечивает выдачу управляющих команд на клапаны манипулятора и технологического оборудования.
Блок питанияобеспечивает питание электрооборудования, датчиков манипулятора и технологического оборудования.
Основные режимы работы устройства:
Ручной
Команда
Цикл
Автомат
1. В ручномрежиме команды на манипулятор задаются с ПУ и поступают на манипулятор для управления подвижными звеньями. Контроль положения подвижных звеньев осуществляется с помощью табло индикации.
2. В режиме команда устройство обеспечивает отработку одного кадра программы, набранный на программоносителе.
3. В режиме циклустройство обеспечивает однократную обработку всех кадров программы.
4. В режиме автоматустройство обеспечивает многократную отработку рабочего цикла.
Блок выходных усилителей (БВУ) состоит из трех плат. Блок питпния (БП) состоит из двух трансформаторов, выпрямителя, стабилизатора. Система команд и распайка разъемов устройства управленияЭЦПУ-6030 для промышленного роботаМП-11:
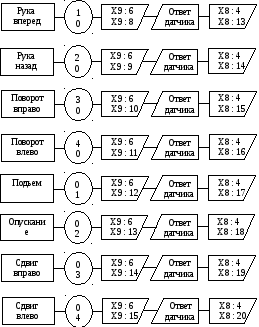
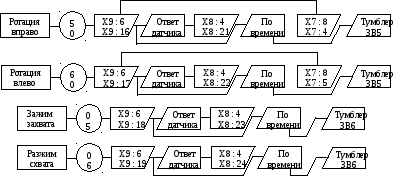
Программы управления звеньями манипулятора.
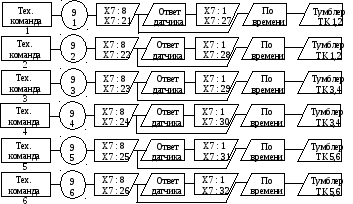
Команды управления технологическим оборудованием.
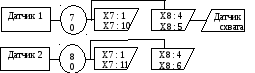
Команды опроса датчиков (блокировок) и выдержки времени.
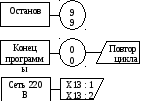
Команды управления программой.
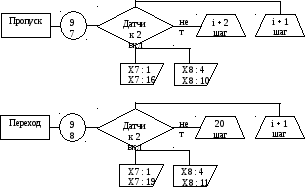
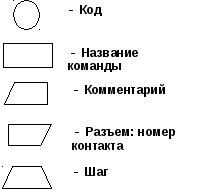
X7 – разъем связи с технологическимоборудованием;
X8разъем связи с датчикамиманипулятора;
X9 – разъем связи с электромагнитамиманипулятора.
12. Микропроцессорное программное цикловое устройство МПЦУ (МКП-1).
Предназначено для управления автоматическими линиями при автоматизации технологического процесса в условиях серийного и мелкосерийного производства, когда требуется развитое программно-логическое управление, оперативная смена управляющих программ и когда использование стандартных средств ЭВМ экономически нецелесообразно ввиду их высокой стоимости и сложности обслуживания.
Типы управления:цикловой, повременному,путевомуилисовмещенномупринципам,программно-логический.
Изготовляется в двух исполнениях:
МПЦУ-1-48 (возможности
 ,
48 выходов и 48 входов);
,
48 выходов и 48 входов);МПЦУ -1-32 (возможности
 ,
32 выхода и 32 входа).
,
32 выхода и 32 входа).