

2.4 Построение диаграммы аналога ускорения поршня
Ускорение, с которым движется тело, равно как отношение приращения скорости к времени, за которое это приращение произошло, что соответствует первой производной скорости по времени или второй производной перемещения по времени.
В нашем случае это будет вторая производная перемещения поршня по углу поворота кривошипа, которая будет называться аналогом ускорения.
Итак, аналог ускорения
это производная
 .
Найдем ее.
.
Найдем ее.




Теперь вычислим
значения аналога ускорения поршня
насоса для соответствующих углов
поворота кривошипа. Для
 :
:



Аналогично
для
 :
:



и
так далее, до угла поворота
 .
.
Значения аналога ускорения также можно рассчитать на компьютере. Для этого помещаем курсор в ячейку D3электронной таблицыпрограммыExcelи вводим формулу расчета
 .
.
Поскольку формула расчета аналога ускорения достаточно громоздкая, то она не умещается в окошечке в виде одной строки, поэтому при введении последних символов выражения, первые символы уже не будут видны в окошечке, но это не означает, что они пропали, в памяти компьютера они останутся.
В результате в окошечке над строкой латинских букв должно появиться выражение
=ОКРУГЛ(0,14*COS(3,1416*B3/180)+
(4*0,14^2*COS(3,1416*2*B3/180)*(0,56^2-
0,14^2*(SIN(3,1416*B3/180))^2)+
0,14^4*(SIN(3,1416*2*B3/180))^2)/(4*(0,56^2-
0,14^2*(SIN(3,1416*B3/180))^2)^1,5);3),
записанное без пробелов в две строки (Рисунок 8).
Нажимаем клавишу «Enter»,и в ячейкеD3 появится некоторое число, в нашем случае 0,175. Затем копируем ячейкуD3 и вставляем ее содержимое в остальные ячейки четвертого столбца (Рисунок 8).
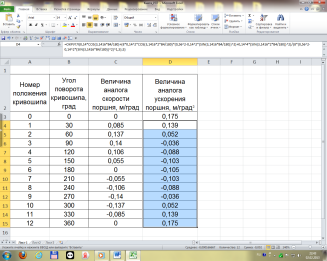
Рисунок 8 – Заполнение третьего столбца таблицы
Полученные данные занесем в таблицу 3 и на их основании необходимо построить диаграмму аналога ускорения поршня для различных положенийкривошипа.
Выбираем соответствующий
масштаб для построения графика на листе
формата А4 (297х210 мм). Например, для угла
поворота кривошипа принимаем масштабный
коэффициент .
Это значит, что расстояние между соседними
точками значений угла на координатной
оси будет равно 10мм.
.
Это значит, что расстояние между соседними
точками значений угла на координатной
оси будет равно 10мм.
Для значений аналога
ускорения поршня принимаем масштабный
коэффициент
 ,
что обеспечит расстояние между соседними
точками на координатной оси равное 15мм.
,
что обеспечит расстояние между соседними
точками на координатной оси равное 15мм.
По оси абсцисс откладываем значения угла поворота кривошипа, по оси ординат – значения аналога ускорения поршня. Для удобства построения графика проводим вертикальные прямые, длины которых равны величинам аналога ускорения. Затем, используя лекало, плавной линией соединяем вершины этих прямых и получаем диаграмму аналога ускорения поршня (рисунок 9).

 ,
,
0,18

0,12
0,06

030 60 90 120 150 180 210 240 270 300 330 360 αi,град
-0,06
-0,12
Рисунок 9 – Диаграмма аналога ускорения поршня
3 Проектирование зубчатого механизма
3.1 Синтез трехступенчатого редуктора с планетарной передачей
Зубчатый механизм привода кулачка представляет собой трехступенчатый редуктор, одна из ступеней которого является однорядным планетарным механизмом, (рисунок 10).





6
3







2





Н







ЭД



















4


751




Рисунок 10 – Кинематическая схема трехступенчатого редуктора
с планетарной ступенью
Передаточное отношение редуктора
 ,
,
С другой стороны
 ,
(1)
,
(1)
где: – передаточное число планетарной
ступени,
– передаточное число планетарной
ступени,
 ,
, .
.
Передаточное отношение однорядной планетарной передачи определяется по формуле
 .
(2)
.
(2)
Синтез планетарных
зубчатых механизмов заключается в
подборе чисел зубьев колес, входящих в
данный механизм, с целью обеспечения
заданного передаточного отношения при
заданном количестве сателлитов.
Допускается отклонение полученного
передаточного отношения от его заданного
значения, но оно не должно превышать
4%. При этом также должны быть выполнены
еще четыре условия: правильного
зацепления, соосности, соседства и
сборки.
Выполнение условия
правильного зацепленияобеспечивает
устойчивую и долговременную работу
зубчатого планетарного механизма без
подрезания зубьев, без их интерференции
и заклинивания передачи. Для этого
необходимо, чтобы минимальное число
зубьев колеса с внешними зубьями при
внешнем зацеплении было ,
а при внутреннем –
,
а при внутреннем – .
Для колес с внутренними зубьями должно
выполняться условие
.
Для колес с внутренними зубьями должно
выполняться условие .
Кроме этого, при внутреннем зацеплении
должно выполняться неравенство
.
Кроме этого, при внутреннем зацеплении
должно выполняться неравенство ,
где
,
где – число зубьев колеса с внутренними
зубьями,
– число зубьев колеса с внутренними
зубьями, –
число зубьев колеса с внешними зубьями.
–
число зубьев колеса с внешними зубьями.
Условие соосностидля нашего редуктора заключается в том, что валы колес 1 и 4, а также водилаН,должны лежать на одной прямой. Это условие будет выполняться, если будут справедливы следующие равенства:
 ,
(3)
,
(3)
и
 .
(4)
.
(4)
Условие соседствазаключается в том, чтобы два соседних сателлита механизма при своем движении не соприкасались друг с другом выступами головок зубьев.
Как видно из рисунка 11, для этого необходимо, чтобы межосевое расстояние асбыло больше суммы радиусов соседних сателлитов, и между ними существовал бы некоторый зазор, то есть
 .
(5)
.
(5)
Из треугольника О'1ОО''1следует
 ,
,
где
 – радиусы сателлитов.
– радиусы сателлитов.


r2
O'1

асr1


γО










O''1O'''1
Рисунок 11 Центральное колесо с сателлитами
Очевидно, что
 ,
гдеКс─ число сателлитов
(рисунок 11). Тогда
,
гдеКс─ число сателлитов
(рисунок 11). Тогда
 .
.
Подставим это значение асв (5)
 или
или
 .
.
Выразим условие
соседства для нашего планетарного
механизма через числа зубьев центрального
колеса
 и сателлита
и сателлита ,
с учетом высоты зуба каждого из колес,
(для обеспечения зазора между сателлитамив
числитель принято добавлять двойку)
,
с учетом высоты зуба каждого из колес,
(для обеспечения зазора между сателлитамив
числитель принято добавлять двойку)
 .
(6)
.
(6)
Если неравенство
не выполняется, то допускается либо
уменьшение числа сателлитов, (до трех),
либо изменение количества зубьев первого
колеса
 (без изменения передаточного отношения
редуктора).
(без изменения передаточного отношения
редуктора).
Условие сборкипри синтезе планетарного механизма предусматривает подбор чисел зубьев колес таким образом, чтобы зубья всех сателлитов (колес 6) точно входили во впадины центрального колеса 5 и опорного колеса 7 при строго симметричном расположении сателлитов. Это условие выполняется при существовании равенства
 (7)
(7)
где: Е ─ любое натуральное число;Кс─ число сателлитов;Р─ целое неотрицательное число (0, 1, 2, 3).
Если равенство не
выполняется, то допускается либо
изменение числа сателлитов в сторону
их уменьшения, (до трех), либо изменение
числа зубьев колеса
 (без изменения передаточного отношения
редуктора).
(без изменения передаточного отношения
редуктора).