

§9. Линейные преобразования векторных пространств.
Основное определение. Ранее рассматривали функции, т.е.
 ставится в соответствие число. Теперь
– обобщение.
ставится в соответствие число. Теперь
– обобщение.
Определение 1.
Пусть
![]() -n-мерному
векторному пространству поставлен в
соответствие
-n-мерному
векторному пространству поставлен в
соответствие
![]() (тому же пространству). Соответствие
(тому же пространству). Соответствие![]() назовём преобразованием пространства
назовём преобразованием пространства![]() .
.
Преобразование
![]() называется линейным, если
называется линейным, если
Примеры:
Пусть L2 – подпространство в трехмерном пространстве L3.
 соответствующемуL3
поставим в соответствие его проекцию
на L2
:
соответствующемуL3
поставим в соответствие его проекцию
на L2
:
 .
Это линейное преобразование, свойства
1, 2 – легко проверяются.
.
Это линейное преобразование, свойства
1, 2 – легко проверяются.Пусть
 - матрица
- матрица ,L
– пространство n
– чисел
,L
– пространство n
– чисел
 .
. .
Это линейное преобразование.
.
Это линейное преобразование.Ln – пространство многочленов степени
 .
Пусть
.
Пусть - т.е. производная многочлена. Линейность
– очевидна.
- т.е. производная многочлена. Линейность
– очевидна.L=C[a,b],
 -
линейность
-
линейность из
свойств интеграла.
из
свойств интеграла.
Это пример преобразования в бесконечномерном пространстве. Далее – лишь конечномерные.
Матрица линейного преобразования.
Пусть
![]() -
базис в
-
базис в![]() и
и![]() -
линейное преобразование. Каждый
-
линейное преобразование. Каждый![]()
![]() .
Векторы
.
Векторы![]() не зависят отx
и
не зависят отx
и
![]() они м. б. разложены по базису
они м. б. разложены по базису![]() :
:![]() ,
т.е. если
,
т.е. если![]() ,
где
,
где
 (1)
(1)
Определение 2.
Матрицей линейного преобразования
![]() в базисе
в базисе![]() называется матрица (1), столбцы которой
– координаты образов векторов
называется матрица (1), столбцы которой
– координаты образов векторов![]() в базисе
в базисе![]() .
.
Предположение
1. Выбор
базиса в
![]() устанавливает взаимно однозначное
соответствие между линейными
преобразованиями этого пространства
и квадратными матрицами порядкаn.
устанавливает взаимно однозначное
соответствие между линейными
преобразованиями этого пространства
и квадратными матрицами порядкаn.
Док-во:
Итак, показано, что если выбран базис,
то любому преобразованию соответствует
матрица (1). В соответствии с примером 2
из пункта 1, любой матрице соответствует
линейное преобразование. Осталось
проверить, что разным матрицам
соответствуют разные преобразования.
Пусть
![]() и
и![]() - разные преобразования, т.е.
- разные преобразования, т.е.![]() .
Если они имеют одну и туже матрицуA,
то для x
имеем:
.
Если они имеют одну и туже матрицуA,
то для x
имеем:
![]() ,то
противоречит.
,то
противоречит.
При изменении базиса матрица линейного преобразования вообще говоря изменяется.
Примеры:
Пусть L – трёхмерное пространство с базисом
 ,
а
,
а -
оператор проектирования на плоскость
-
оператор проектирования на плоскость .
Тогда
.
Тогда

 матрица
матрица .
.Если
 -тождественное
преобразование, то
-тождественное
преобразование, то
Ln –многочлены степени
 .
. .
.
Базис Ln
:
![]() .
.
Тогда
![]() .
.
Т.о. матрица
 .
.
Рассмотрим формулы
преобразования A
при переходе к другому базису. Пусть
![]() .
Пусть
.
Пусть![]()
![]()
![]() .
.
Свойства:
Ранг матрицы линейного оператора при переходе от одного базиса к другому является инвариантом.
Определитель матрицы линейного оператора инвариантен.
Док-во: Следует из свойств ранга и определителя.
3.Сложение и умножение линейных преобразований.
Определение 3.
Произведением
линейных преобразований
![]() и
и![]() называется
называется![]() .
.
Очевидно, что
![]() -линейное
преобразование:
-линейное
преобразование: ![]()
![]() .
.
Если
![]() -
единичное преобразование, то
-
единичное преобразование, то![]() .
.
Можно определить
степени преобразований:
![]() .
.
Тогда
![]() .
.
Пусть в базисе
![]() преобразованию
преобразованию![]() соответствует матрица
соответствует матрица![]() ,
,![]() ,
,![]() .
ВыразимC
через A
и B.
.
ВыразимC
через A
и B.
По определению
![]()
![]()
Далее
![]() ,
т.е.
,
т.е.![]() есть сумма произведений элементовi-ой
строки A
на j-ый
столбец B
есть сумма произведений элементовi-ой
строки A
на j-ый
столбец B
![]() C=AB
– произведение матриц
C=AB
– произведение матриц
![]() все свойства произведения матриц
переносятся на преобразования
(ассоциативность, не коммутативность).
все свойства произведения матриц
переносятся на преобразования
(ассоциативность, не коммутативность).
Определение 4.
Суммой преобразований
![]() и
и![]() называется
называется![]() .
Легко показать, что матрица С=A+B.
.
Легко показать, что матрица С=A+B.
Операции сложения и умножения удовлетворяют обычным свойствам сложения и умножения матриц. Это следует из того, что между матрицами и преобразованиями есть взаимно однозначное соответствие. Нулевое преобразование – нулевая матрица.
Предложение 2. Множество преобразований линейного пространства образует кольцо, называемое кольцом эндоморфизмов.
Определение 5.
Произведением линейного преобразования
![]() на
число
на
число![]() называется преобразование
называется преобразование![]() .
.
Свойства: очевидны.
Предложение 3.
множество линейных преобразований
образует линейное пространство
размерности
![]() .
.
Следствие.
Матрицы
![]() –
линейно зависимы
–
линейно зависимы![]() множеств степени
множеств степени![]()
4.Обратное преобразование. Ядро и образ преобразования.
Определение 6.
Преобразование
![]() называется
обратным к
называется
обратным к![]() ,
если
,
если![]() ,
где
,
где![]() -
единичное преобразование.
-
единичное преобразование.
Обратное
преобразование обозначается
![]() .
.
Обратное
преобразование
![]() не у всех. Известно, что если у матрицыA
не у всех. Известно, что если у матрицыA
![]()
![]() ,
т. и т.т., к.
,
т. и т.т., к.![]()
Предложение
4. Преобразование
![]() имеет обратное
имеет обратное![]() его матрица в некотором базисе имеет
его матрица в некотором базисе имеет![]() .
Такое преобразование называется
невырожденным.
.
Такое преобразование называется
невырожденным.
Очевидно, что невырожденные преобразования являются взаимнооднозначными.
Определение 7. Взаимнооднозначное преобразование Ln называется автоморфизмом.
Предложение 5. Множество автоморфизмов линейного пространства образует группу, изоморфную группе невырожденных матриц.
Далее – ядро и образ линейного преобразования.
Определение 8.
Совокупность M
всех векторов вида
![]() ,
где
,
где![]() ,
называют образом пространстваLn
при преобразовании A.
,
называют образом пространстваLn
при преобразовании A.
Предложение 6. M – подпространство в Ln.
Док-во: Пусть
![]()
![]() Аналогично, из
Аналогично, из
![]()
![]()
Определение 9. Размерность M называется рангом A.
Пример: Ранг преобразования проектирования из V3 в V2 имеет ранг 2.
Определение 10.
Совокупность N
векторов
![]() ,
называется ядром преобразованияA.
,
называется ядром преобразованияA.
Предложение 7. N – подпространство в Ln.
Док-во: Если
![]()
Очевидно, что если A не вырожденное преобразование, то его ядро состоит лишь из нуля.
Теорема 1.
Пусть A
– произвольное линейное преобразование
в Ln.
Тогда
![]()
Док-во: Пусть
![]() .
Тогда
.
Тогда![]() -
базис в ядреN,
который может быть дополнен до базиса
-
базис в ядреN,
который может быть дополнен до базиса
![]() .
Рассмотрим
.
Рассмотрим![]() .
Множество этих векторов образует
подпространство, совпадающее с М.
Действительно, еслиy
- произвольный вектор из M,
то
.
Множество этих векторов образует
подпространство, совпадающее с М.
Действительно, еслиy
- произвольный вектор из M,
то
![]()
![]()
![]() ,
ч.т.д.
,
ч.т.д.
Покажем, что вектора
![]() -
линейно независимы. От противного.
-
линейно независимы. От противного.
Пусть
![]() .
Рассмотрим
.
Рассмотрим![]() .
Тогда
.
Тогда![]() ,
т.е.
,
т.е.![]() .
Противоречие, т.к. с одной стороныx
представим как линейная комбинация
базисных векторов ядра, т.е.
.
Противоречие, т.к. с одной стороныx
представим как линейная комбинация
базисных векторов ядра, т.е.
![]() ,
с другой стороны
,
с другой стороны![]() .
Это противоречит единственности
представления вектора в базисе
.
Это противоречит единственности
представления вектора в базисе![]()
![]() - линейно независимы
- линейно независимы![]()
5.Инвариантные подпространства линейного оператора.
Определение 11.
Пусть
![]() - линейное преобразование в
- линейное преобразование в![]() .
Линейное подпространство
.
Линейное подпространство![]() называется инвариантным относительно
называется инвариантным относительно![]() ,
если
,
если![]() .
.
Тривиальные
инвариантные подпространства – это
нулевое подпространство и всё
![]() .
.
Примеры:
1)
![]() ,
,![]() - вращение относительно некоторой
прямой, проходящей через нуль. Инвариантные
подпространства – ось вращения и любая
плоскость, перпендикулярная оси вращения.
- вращение относительно некоторой
прямой, проходящей через нуль. Инвариантные
подпространства – ось вращения и любая
плоскость, перпендикулярная оси вращения.
2)
![]() ‑ плоскость,
‑ плоскость,![]() .
.![]()
![]() инвариантные подпространства – прямые,
проходящие через начало координат.
инвариантные подпространства – прямые,
проходящие через начало координат.
3)
![]() - многочлены степени
- многочлены степени![]() .
Множество многочленов степени
.
Множество многочленов степени![]() ,
,![]() - инвариантное подпространство
относительно дифференцирования.
- инвариантное подпространство
относительно дифференцирования.
4) Пусть в
![]() матрица линейного преобразования
матрица линейного преобразования![]() имеет вид
имеет вид
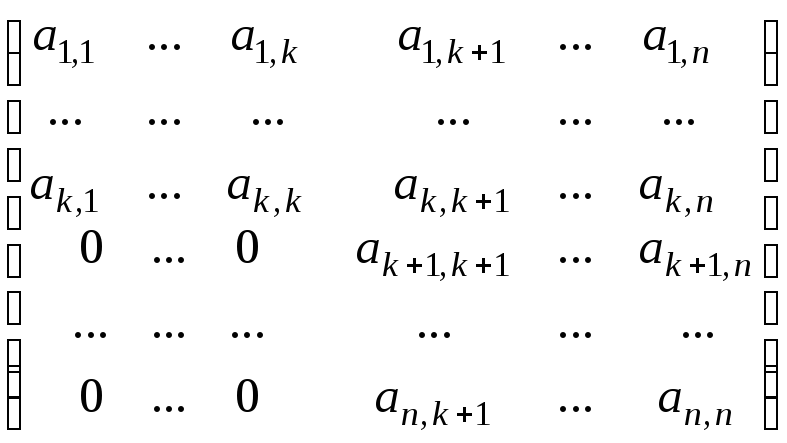 в базисе
в базисе
![]() .
Тогда
.
Тогда![]() - инвариантное подпространство. Если
- инвариантное подпространство. Если![]() ,
то
,
то![]() - тоже инвариантное подпространство.
- тоже инвариантное подпространство.
Теорема 2.
Сумма и пересечение инвариантных
подпространств относительно оператора
![]() являются инвариантными подпространствами.
являются инвариантными подпространствами.
Доказательство.
Пусть
![]() и
и![]() - инвариантные подпространства
- инвариантные подпространства![]() относительно
относительно![]() ,
т.е. если
,
т.е. если![]()
![]()
![]()
![]() и
и![]()
![]()
![]() .
Рассмотрим
.
Рассмотрим![]() .
Пусть
.
Пусть![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() если
если![]() пересечению, то и
пересечению, то и![]() принадлежит пересечению.
принадлежит пересечению.
Рассмотрим теперь
![]()
![]()
![]() ,
имеем
,
имеем![]() ,
где
,
где![]() и
и![]()
![]()
![]() ,
,![]()
![]()
![]()
![]() сумма инвариантных подпространств –
инвариантное подпространство.
сумма инвариантных подпространств –
инвариантное подпространство.
Выясним, какой вид
принимает матрица линейного оператора
в
![]() ,
если
,
если![]() и базис в
и базис в![]() состоит из базиса
состоит из базиса![]() в
в![]() и базиса
и базиса![]() в
в![]() .
Т.к.
.
Т.к.![]() и
и![]() - инвариантные подпространства, то
- инвариантные подпространства, то
![]()

![]()
 .
.
Получилась
квазидиагональная матрица, т.е. состоит
из клеток, стоящих на главной диагонали,
![]() и
и![]() - матрицы оператора
- матрицы оператора![]() в подпространствах
в подпространствах![]() и
и![]() соответственно. ■
соответственно. ■