

2. Модель системы управления
Схема системы управления показана на рис. В.2.1. Здесь Дх и Дт — датчики, с помощью которых измеряется состояние среды и объекта соответственно. Для обучающей системы объектом является ученик, управляющим устройством – педагог, алгоритм – программа обучения, Dx и Dy – средства контроля знаний учеников (проверка домашних заданий, контрольные работы, тестирования…)
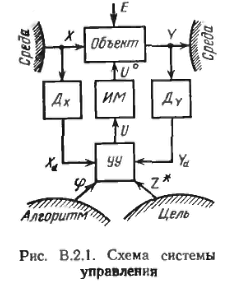
Результаты измерений
Xd=Dx(X); Yd=Dy(Y), (В.2.1)
где Dx и Dy — операторы этих датчиков, являются исходной информацией для управляющего устройства (УУ), которое на этой основе вырабатывает управляющее воздействие U.
Эти формулы выражают очевидную связь между состоянием (среды или объекта) и информацией об этом состоянии. А это далеко не одно и то же. Разницу легко увидит тот, кто попытается оценить навыки обучающегося практического применения полученных знаний по информации, содержащейся в контрольной работе по теоретическому материалу определенной темы. В этом случае X — действительные знания ученика практического выполнения задания, а Xd — оценка контрольной работы.
Таким образом, в основе процесса управления лежит информация о сложившейся ситуации:
I={ Xd ,Yd ) (B-2.2)
хотя она всегда является неполной. Эта неполнота, прежде всего, связана с ограниченными возможностями всякой системы сбора информации I и необходимостью «платы» за эту информацию. А при ограниченных ресурсах, выделяемых обычно на управление, указанное обстоятельство приводит к постоянному дефициту информации о поведения среды и объекта.
Сказанное заставляет образовать еще один вход объекта— ненаблюдаемое возмущение Е (см. рис. В.2.1), под которым подразумеваются все ненаблюдаемые внешние и внутренние факторы объекта, влияющие на его состояние У, т. е. Y=F°(Xt U, E), что уточняет (В.1.5). Относительно входа Е могут выдвигаться лишь определенные предположения, но непосредственно этот вход не измеряется. Вход Е образуют прежде всего неизменяемые параметры среды и всякого рода случайные изменения характеристик самого объекта.
Таким образом, объект управления имеет три входа: наблюдаемый (X), управляемый, а следовательно, и наблюдаемый (U0) и ненаблюдаемый (Е). Заметим, что управляющее воздействие (команда, вырабатываемая управляющим устройством) U представляет собой информацию о том, в какое положение должны быть приведены управляемые входы объекта U°. «Отработка» этой команды осуществляется исполнительными механизмами (ИМ), которые и изменяют состояние управляемого входа U0объекта. Будем для простоты предполагать, что исполнительные механизмы мгновенно выполняют команду U и поэтому U0= U.
Для целенаправленного функционирования управляющего устройства ему кроме информации (В.2.2) необходимо сообщить цель Z* управления, т. е. к чему ему следует стремиться в процессе управления, и алгоритм управления, т. е. указание, как добиться этой цели.
Под алгоритмом в данном случае мы понимаем четкое недвусмысленное правило, инструкцию, указание, что и как следует делать, чтобы добиться заданной цели Z* в сложившейся ситуации I
Теперь, располагая информацией о состояниях среды, объекта и цели, можно представить управление U как результат работы алгоритма:
U=φ(I,Z*), (В.2.3)
где φ — алгоритм управления. Он представляет собой оператор φ = φ (•, •), перерабатывающий информацию о среде, объекте и цели в управление U, реализация которого U° должна переводить объект в требуемое состояние Z*.
Таким образом, основными факторами всякого управления, которые присущи любой системе управления объектом, являются:
— цель управления (Z*);
— информация о состоянии объекта и среды (I);
— воздействие на объект, т. е. собственно управление
— алгоритм управления (φ).
Заметим, что слово «управление» обычно используют в двух смыслах. В широком смысле это процесс достижения поставленных целей (в этом смысле мы его применяли раньше), а в узком —всякое целенаправленное воздействие на объект (задание упражнений для домашней работы, проверка решений задач, контрольные работы по пройденным темам…).
Таким образом, управление в широком смысле определяется множеством целей {Z*}, которые поступают в систему управления извне. Эти цели ставит субъект, являющийся потребителем будущей системы управления объектом. Субъект выступает в качестве заказчика на создание системы управления. Созданием же этой системы управления занимается проектировщик.
Однако, прежде чем принять решение о создании системы управления, необходимо рассмотреть все этапы управления, независимо от того, с помощью каких материальных средств будут реализованы эти этапы. Такой алгоритмический анализ управления является основой для принятия решения о создании системы управления и степени ее автоматизации. При этом анализе следует учитывать фактор сложности объекта управления.