

tmech_RGR_PPR_MMI_2013
.pdfКінематичний аналіз плоского механізму з одним степенем вільності
|
C |
|
|
|
wобB |
wдцB |
|
q |
wобB |
|
|
|
|
|
|
B |
|
|
К |
wоб |
дц |
wдцB |
|
об |
AB |
wAB |
|
|
wAB |
y |
|
|
wA |
wB |
|
|
|
wдцAB |
B |
O |
60º |
A |
l |
|
|
wA |
|
x |
|
|
Рис.2,д |
|
|
Рис.2,е |
Виберемо систему координат Оxy з початком в точці O і запишемо
рівність (2) в проекціях на осі Ox і Oy (напрям wоб вибираємо заздалегідь): |
|
|||
|
|
|
AB |
|
wBx |
wA |
wобAB sin60 |
wдцAB cos60 , |
(3) |
wBy |
wобAB |
cos60 wдцAB |
sin60 . |
|
Кількість невідомих у цій системі перевищує кількість рівнянь. Для складання додаткових рівнянь запишемо прискорення точки В відносно полюса
С:
|
|
|
|
|
|
|
wB =wобB +wдцB , |
|
|
|
|
(4) |
||
де wоб = |
3 |
CB, wдц |
3 |
( |
3 |
CB) . |
3 |
, |
3 |
- кутове прискорення та кутова |
||||
B |
|
B |
|
|
|
|
|
|
|
|||||
швидкість |
ланки |
СВ. |
Величину кутової швидкісті |
3 |
ланки СВ беремо з |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
порівняльної таблиці |
3 |
20 рад/c. Тоді |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wдцB |
|
32 CB |
4000 см/с2 . |
|
|
|
||||
Вектор wдц має напрям від точки В до полюса С. |
|
|
|
|||||||||||
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор wоб |
перпендикулярний до |
ланки СВ, |
|
але обчислити |
його |
|||||||||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
величину неможливо, оскільки невідоме значення кутового прискорення |
3 . |
|||||||||||||
|
|
|
|
|
|
|
|
21 |
|
|
|
|
|
|
Кінематичний аналіз плоского механізму з одним степенем вільності
Вважаючи, що вектор |
wоб |
напрямлений так, як показано на рис.2,д, |
||
|
B |
|
|
|
спроектуємо рівність (4) на осі системи координат Оxy: |
|
|||
wBx |
wобB |
cos30 |
wдцB cos60 , |
(5) |
wBy |
wобB |
sin30 |
wдцB sin60 . |
|
Оскільки ліві частини рівнянь (3) та (5) рівні, то рівними будуть і праві частини:
wA wобAB sin60 |
wдцAB cos60 |
wобB cos30 |
wдцB cos60 , |
(6) |
|||||
wобAB cos60 |
wдцAB sin60 |
wобB sin30 |
wдцB |
sin60 . |
|
||||
Розв’язуємо систему рівняння (6) відносно wоб та wоб : |
|
|
|||||||
|
|
|
|
|
|
AB |
B |
|
|
|
|
|
|
|
|
|
|||
wобAB |
3600 3 см/с2 = − 6235,4 см/с2 . |
|
|||||||
|
|
|
|
|
|
||||
wобB |
1200 3 см/с2 |
= − 2078,4 см/с2 . |
|
||||||
Від’ємні знаки в отриманих виразах означають, що дійсний напрям векторів знайдених прискорень протилежний до вказаного на рисунку.
Підстановка отриманих значень у рівняння (3) або (5) дозволяє знайти
прискорення wB : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wBx |
|
wобB |
cos30 |
|
wдцB |
cos60 = 1800 + 2000= 3800 см/с2, |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
wBy |
wобB |
sin30 |
|
wдцB sin60 =−600 |
|
3 +2000 3 =2424,8 см/с2, |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
wB |
|
w2Bx |
w2By = 4507,8 см/с2. |
|
|
|
|
|
|
|
|
|||||||||
Зазначимо, |
що маючи значення wоб та |
wоб |
знаходимо також модулі |
|||||||||||||||||
|
|
|
|
|
|
|
|
AB |
|
B |
|
|
|
|
|
|||||
кутових прискореннь ланок механізму: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
wобAB |
72 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
2 |
AB |
3 рад/c , |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wобB |
120 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
3 |
|
CB |
|
3 рад/с . |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Напрям вектора кутового прискорення |
2 |
визначається на |
підставі |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
векторного добутку |
wоб = |
2 |
AB |
та дійсного напряму вектора |
wоб |
по |
||||||||||||||
|
|
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
|
||
|
|
|
|
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|

Кінематичний аналіз плоского механізму з одним степенем вільності
відношенню до полюса А і, в данному випадку, він напрямлений перпендикулярно до площини рисунка від читача.
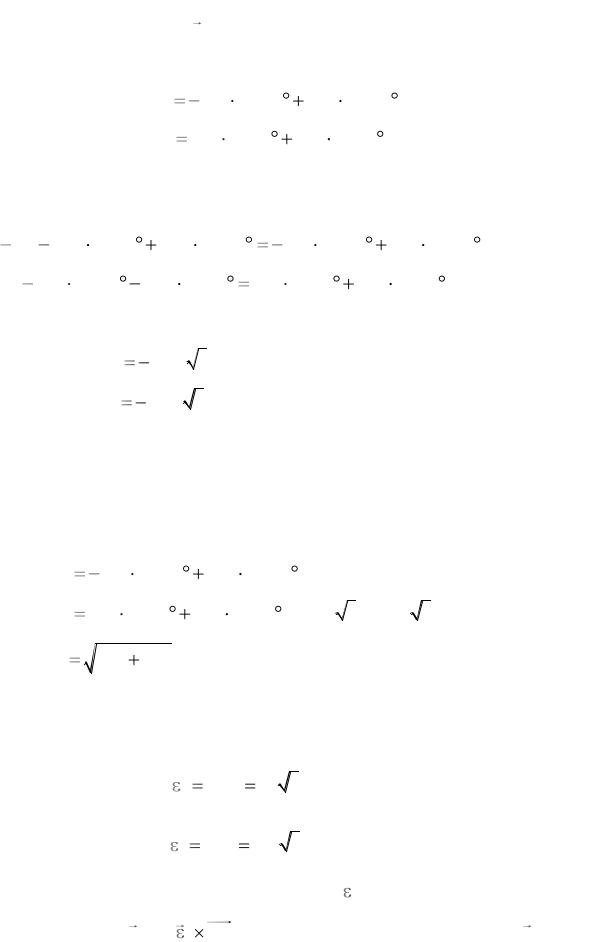
Розв’язати задачу про визначення прискорень можна також графічним методом, побудувавши план прискорень. Для цього, згідно вибраного масштабу прискорень ( 1 см побудови відповідає 800 см/с2 ), будуємо рівність (2), в якій
повністю відомі вектори wA і wдцAB , а також відома пряма вздовж якої напрямлений вектор wобAB (рис.2,е). Від точки В відкладаємо послідовно вектор wA і вектор wдцAB . Через кінець останнього проводимо пряму l
перпендикулярну до ланки AB (вона збігається з напрямком wобAB ). Далі будуємо рівність (4). Тут нам відомий вектор wдцB та пряма вздовж якої напрямлений вектор wобB . Починаючи також з точки В, відкладаємо спочатку вектор wдцB ,
а потім проводимо через його кінець пряму q перпендикулярну до ланки СВ.
Точка перетину К цієї прямої з прямою l визначає кінець вектора BK wB ,
який і є шуканим прискоренням точки В. На плані прискорень величину векторів wB , wобAB та wобB отримуємо у тому ж масштабі, що і векторів wA та wдцAB : wB = 4500 см/с2, wобAB = 6300 см/с2 та wобB = 2100 см/с2. Розбіжність між результатами аналітичних обчислень та планом прискорень не перевищує 5 % і
пояснюється похибками вимірювання.
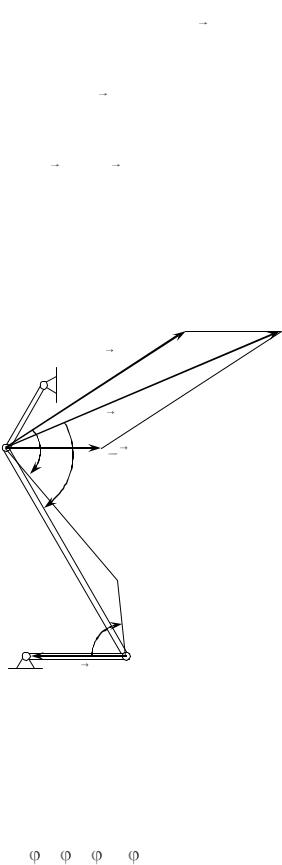
Визначимо миттєвий центр прискорень (МЦП) ланки АВ.
Скористаємось графічним методом. За теоремою про розподіл прискорень,
запишемо прискорення точки В відносно полюса А – wB =wA +wAB ,
та знайдемо вектор wAB :
wAB = wB -wA = wB + (-wA).
Побудова здійснюється у точці В (рис.2, є). У точку В треба перенести вектор протилежний до вектора wA і скласти його з вектором wB ,
23
Кінематичний аналіз плоского механізму з одним степенем вільності
використовуючи правило паралелограма. Вектор wAB утворює з відрізком ВА
кут α, який визначається вимірюванням α=81°, причому поворот по найкоротшому шляху від вектора wAB до ВА здійснюється за стрілкою годинника. Враховуючи це, проводимо через точки А та В дві прямі під кутом
α=81° до векторів прискорень wA та wB у напрямку за стрілкою годиннка.
Перетин цих прямих визначає МЦП тіла АВ – точку Q. Знаючи положення МЦП нескладно визначити графічно прискорення будь-якої точки тіла АВ. Це пропонується зробити читачєві самостійно.
wB
C
wAB
B
wА
α α
|
|
Q |
O |
α |
A |
wA
Рис.2,є
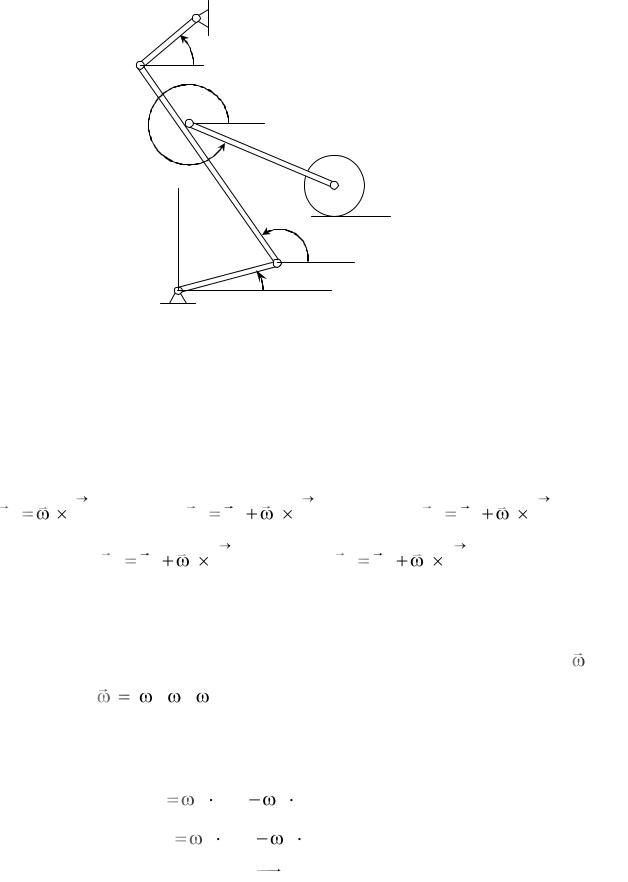
Аналіз роботи механізма за допомогою ПК полягає в складанні системи рівнянь для визначення кутових швидкостей ланок як функцій кутів і в розв'язанні цих рівнянь.
Додатні значення кутів 1 , 2 , 3 і 4 , що визначають положення ланок
OA, AB, BC, DE відповідно, визначають поворот цих ланок проти ходу годинникової стрілки від додатнього напряму осі Ox (рис.2, ж).
24
Кінематичний аналіз плоского механізму з одним степенем вільності
C
B |
φ3 |
|
|
|
|
|
D |
|
φ4 |
|
|
|
|
E |
y |
|
y |
|
|
|
|
A |
φ2 |
O |
φ1 |
x |
Рис.2,ж
Спочатку, за допомогою формул розподілу швидкостей точок тіла при плоскопаралельному русі, визначимо швидкості точок А, В, D, E з'єднання ланок:
vA 1 OA; |
|
vB |
vA |
2 |
AB; |
vC |
vB 3 BC ; |
|
vD |
vA |
2 |
AD; |
|
vE vD |
4 |
AD. |
(7) |
Беручи до уваги особливості в’язей, накладених на механізм, а саме те, |
||||||||
що точка C нерухома і вектор швидкості точки E напрямлений горизонтально, з |
||||||||
виразів (7) дістанемо рівняння для обчислення ωі . Зазначимо, що вектори |
i |
|||||||
можна подати так i |
{ ix , |
iy , iz}. |
|
|
|
|
|
|
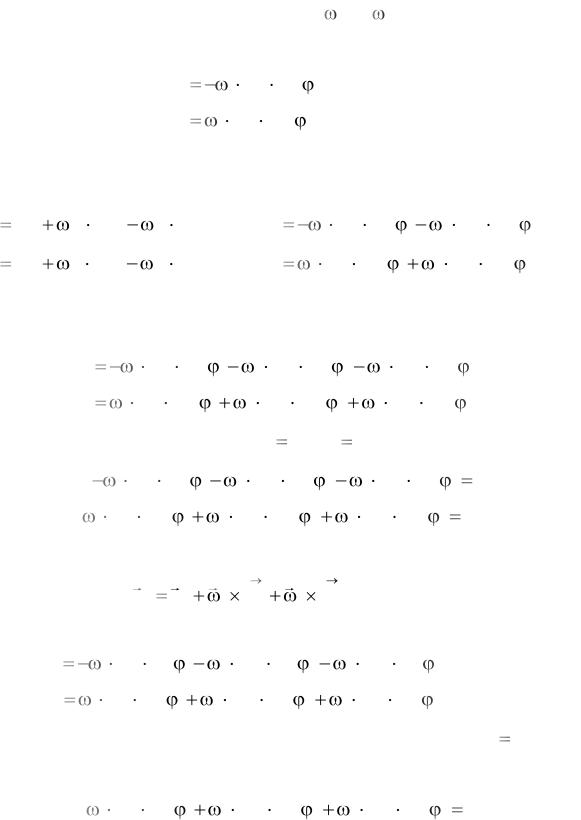
Проектуючи на координатні осі Ox і Oy рівності (7), з першої формули |
||||||||
дістанемо |
|
|
|
|
|
|
|
|
|
vAx |
1y OAz |
1z OAy ; |
|
|
|
||
|
vAy |
1z |
OAx |
1x |
OAz . |
|
|
(8) |
Тут OAx , OAy , OAz – проекції вектора OA на координатні осі Oxy.
25
Кінематичний аналіз плоского механізму з одним степенем вільності
Оскільки при плоскому русі складові |
ix |
і |
iy |
дорівнюють нулю, то |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
формули (8) спрощуються: |
|
|
|
|
|
|
|
|
||||
|
|
|
|
vAx |
1 OA sin |
1; |
|
|
|
|
|
|
|
|
|
|
vAy |
1 OA cos |
1. |
|
|
|
|
|
|
Тут і надалі індекс "z" біля ω опущено. |
|
|
|
|
|
|
|
|||||
З другої формули виразів (7) маємо |
|
|
|
|
|
|
|
|||||
vBx |
vAx |
2y |
ABz |
2z ABy ; |
vBx |
|
1 OA sin |
1 |
2 AB sin |
2 ; |
||
vBy |
vAy |
2z |
ABx |
2x ABz |
vBy |
1 |
OA cos |
1 |
2 |
AB cos |
2 . |
|
Враховуючи отримані співвідношення, з третьої формули виразів (7)
маємо
vCx |
1 OA sin |
1 |
2 |
AB sin |
2 |
3 |
BC sin |
3. |
|
|||
vCy |
1 OA cos 1 |
|
2 AB cos |
2 |
3 |
BC cos |
3 . |
|
||||
Але оскільки точка С нерухома vCx |
0, |
vCy |
|
0, запишемо рівняння |
|
|||||||
|
1 OA sin 1 |
|
2 AB sin |
2 |
|
3 BC sin |
3 |
0, |
(9) |
|||
1 |
OA cos |
1 |
2 |
AB cos |
2 |
3 |
BC cos |
3 |
0 . |
(10) |
||
За четвертим та останнім виразом (7) знаходимо |
|
|
|
|
||||||||
|
vE |
vA |
2 |
AD |
4 |
DE , |
|
|
|
|
|
|
і, проектуючи на осі Ox і Oy, дістанемо:
vEx |
1 OA sin |
1 |
2 |
AD sin |
2 |
4 DE sin 4 , |
|
(11) |
vEy |
1 OA cos |
1 |
2 |
AD cos |
2 |
4 DE cos 4 . |
|
(12) |
Але точка Е рухається тільки вздовж горизонталі, тобто |
vEy |
0. З цієї |
||||||
умови отримаємо рівняння: |
|
|
|
|
|
|
|
|
|
1 OA cos |
1 |
2 |
AD cos |
2 |
4 DE cos 4 |
0. |
(13) |
Система рівнянь (9), (10), (12) дозволяє визначити невідомі кутові швидкості ω2, ω3, ω4. Швидкість точки E визначають з рівняння (11).
26
Кінематичний аналіз плоского механізму з одним степенем вільності
Для визначення ω2 домножимо рівняння (9) на cos φ3, рівняння (10) sin φ3
та складемо їх. Для визначення ω3 домножимо рівняння (9) на cos φ2, рівняння
(10) на sin φ2 та складемо їх. Після нескладних перетворень отримаємо
|
|
|
OA sin( |
3 |
1) |
|
. |
|
|
|
|
|
|
(14) |
|||||||
2 |
1 |
AB sin( |
3 |
2 ) |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
OA sin( |
2 |
1) |
|
. |
|
|
|
|
|
|
(15) |
|||||||
3 |
1 |
BC sin( |
2 |
3) |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
1 |
|
|
|
( |
|
1 OA cos |
|
|
AD cos 2 ) |
(16) |
||||||||
4 |
|
|
|
|
|
|
|
1 |
2 |
||||||||||||
|
DE cos |
|
|
||||||||||||||||||
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Підставляючи числові |
|
значення у рівняння (11), (14), (15) |
та (16), дістанемо |
||||||||||||||||||
систему: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
sin( |
3 |
1) |
; |
|
|
|
|
|
|
(17) |
|||||||
|
2 |
sin( |
|
2 ) |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
20 |
|
sin( |
2 |
|
1) |
; |
|
|
|
|
|
(18) |
||||||
|
3 |
|
sin( |
|
|
3) |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
1 |
|
(5 cos |
|
|
|
|
|
7 |
2 cos |
2 ) ; |
|
(19) |
||||
|
4 |
|
|
|
|
|
1 |
|
|
||||||||||||
|
|
cos |
|
8 |
|
||||||||||||||||
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
vEx |
|
200 sin |
1 |
35 |
2 |
|
|
sin |
2 |
40 |
4 |
sin |
4 , |
(20) |
|||||||
яку доповнюємо рівностями |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
1 ; |
2 |
|
|
2 |
; |
|
3 |
|
3 ; |
|
4 |
4 . |
|
(21) |
||||||
Розв'язування рівнянь (17) - (21) виконується на ПК з використанням |
|||||||||||||||||||||
відомих прикладних програм, |
наприклад, МАТНСАD або MATHEMATICA. |
||||||||||||||||||||
Інтервал часу, на якому треба знайти розв’язок вказаних рівнянь, має дорівнювати часу повного оберту ланки ОА.
Значення кутів повороту, кутових швидкостей та швидкості точки Е отриманих за результатами розв’язання системи рівнянь (17) - (21) потрібно порівняти з результатами графічних методів розв’язання задачі для відповідного положення механізму.
27
Кінематичний аналіз плоского механізму з одним степенем вільності
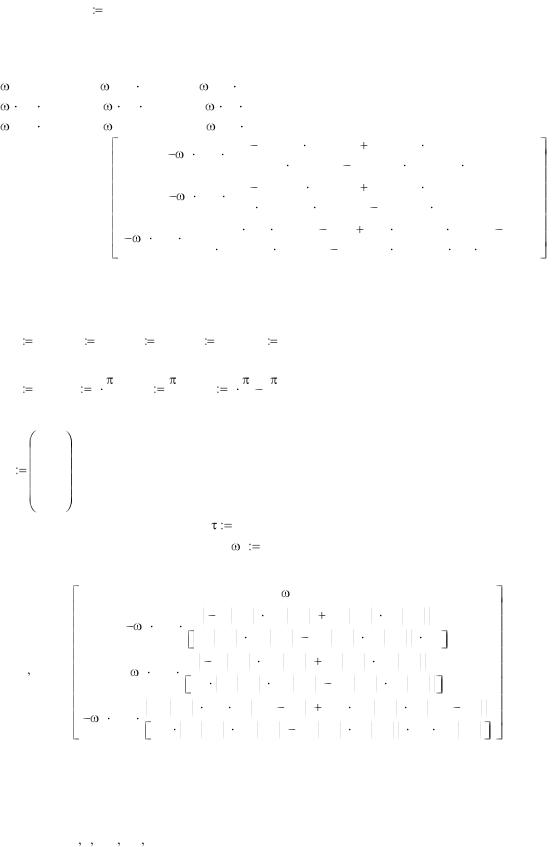
Один з варіантів розрахунку кутів повороту та кутових швидкостей
механізму подано далі у наведеному листингу.
ORIGIN 1
Блок символьного розв'язання алгебраїчних рівнянь
Given
1 OA
OA sin(Ff1)
sin(Ff1)  2
2 AB sin(Ff2)
AB sin(Ff2)  3
3 BCsin(Ff3)
BCsin(Ff3)  0 1 OA cos(Ff1)
0 1 OA cos(Ff1)  2 AB cos(Ff2)
2 AB cos(Ff2)  3 BCcos(Ff3)
3 BCcos(Ff3)  0 1
0 1 OA cos(Ff1)
OA cos(Ff1)  2
2 AD
AD cos(Ff2)
cos(Ff2)  4
4 DEcos(Ff4)
DEcos(Ff4)  0
0
|
|
|
|
|
|
|
|
|
|
|
1 |
OA |
|
( |
sin(Ff1) |
cos(Ff3) |
cos(Ff1) sin(Ff3)) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
[(sin(Ff3) |
cos(Ff2) |
cos(Ff3) |
sin(Ff2)) AB] |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 OA |
|
( |
cos(Ff1) |
sin(Ff2) |
cos(Ff2) sin(Ff1)) |
|||||||||||||||||||
Find(ω2,ω3,ω4) |
→ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
[BC |
(sin(Ff3) |
cos(Ff2) |
cos(Ff3) sin(Ff2))] |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
1 |
OA |
|
|
(cos(Ff1) |
|
|
AB |
sin(Ff3 |
Ff2) |
|
AD |
cos(Ff2) |
sin(Ff1 Ff3)) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
[ AB |
(sin(Ff3) |
|
cos(Ff2) |
cos(Ff3) |
sin(Ff2)) |
DE cos(Ff4) ] |
|||||||||||||||||||||
Блок вхідних даних |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Довжини ланок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
OA |
0.2 |
AB |
0.5 |
BC |
0.1 |
|
|
DE |
0.4 |
|
AD |
0.35 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Початкові значення кутів повороту |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
F10 |
0 |
F20 |
2 |
|
|
F30 |
|
|
|
|
|
|
F40 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
3 |
|
3 |
|
|
|
|
1 |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Вектор стовпчик початкових значень кутів повороту |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
F10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ff |
F20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
F40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Час руху механічної системи |
|
0.06 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Кутова швидкість першої ланки |
|
|
1 |
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Формування правих частин диференціальних рівнянь |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 OA |
|
|
|
sin Ff1 |
|
cos Ff3 |
|
cos Ff1 sin Ff3 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
sin Ff3 |
|
|
cos Ff2 |
cos Ff3 |
|
sin Ff2 |
AB |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
D(t |
Ff) := |
|
|
|
1 OA |
|
|
|
sin Ff1 |
cos Ff2 |
|
sin Ff2 |
cos Ff1 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
BC |
sin Ff3 |
cos Ff2 |
cos Ff3 |
sin Ff2 |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
1 OA |
cos Ff1 |
AB |
sin Ff3 |
|
|
Ff2 |
|
AD |
cos Ff2 |
sin Ff1 |
Ff3 |
|
||||||||||||||||||||
|
|
|
|
AB |
|
sin Ff3 |
cos Ff2 |
cos Ff3 |
sin Ff2 |
DE cos Ff4 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Інтегрування диференціальних рівнянь методом Рунге-Кутта
Z  rkfixed(Ff 0 0.06 100 D)
rkfixed(Ff 0 0.06 100 D)
28
Кінематичний аналіз плоского механізму з одним степенем вільності |
|||||||||
n |
1 |
100 |
|
|
|
|
|
|
|
tn |
Zn 1 |
|
|
|
|
|
|
|
|
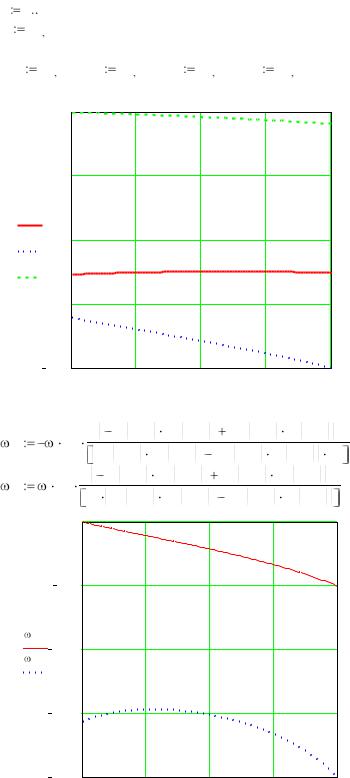
Кути повороту ланок |
|
|
|
|
|
||||
Fi1n |
|
Zn 2 |
Fi2n |
Zn 3 |
Fi3n |
Zn 4 |
Fi4n |
Zn 5 |
|
|
|
6.02 |
|
|
|
|
|
|
|
|
|
4.47 |
|
|
|
|
|
|
|
Fi2n |
|
|
|
|
|
|
|
|
|
Fi3n |
2.93 |
|
|
|
|
|
|
|
|
Fi4n |
|
|
|
|
|
|
|
|
|
|
|
1.38 |
|
|
|
|
|
|
|
|
|
0.17 0 |
|
0.015 |
0.03 |
0.045 |
0.059 |
||
|
|
|
|
|
|
tn |
|
|
|
Кутові швидкості ланок |
|
|
|
|
|||||
2n |
|
1 OA |
sin Fi1n |
cos Fi3n |
cos Fi1n sin Fi3n |
||||
|
|
|
cos Fi3n |
sin Fi2n |
|
||||
|
|
|
sin Fi3n cos Fi2n |
AB |
|||||
3n |
|
1 OA |
|
sin Fi1n |
cos Fi2n |
sin Fi2n |
cos Fi1n |
|
|
|
BC sin Fi3n |
cos Fi2n |
cos Fi3n sin Fi2n |
||||||
|
|
|
|||||||
|
|
4 |
|
|
|
|
|
|
|
|
|
3.68 |
|
|
|
|
|
|
|
|
2n |
|
|
|
|
|
|
|
|
|
|
11.35 |
|
|
|
|
|
|
|
|
3n |
|
|
|
|
|
|
|
|
|
|
19.03 |
|
|
|
|
|
|
|
|
|
26.71 0 |
0.015 |
0.03 |
0.045 |
0.059 |
|||
|
|
|
|
|
|
tn |
|
|
|
|
|
|
|
|
|
|
|
29 |
|
Кінематичний аналіз плоского механізму з одним степенем вільності
Список літератури:
1.Павловський М. А. Теоретична механіка: Підручник. К.: Техніка,
2004. – 512 c.
2.Теоретична механіка: збірник задач: навч. посібник для студ. вищих навч. закл./ за ред. М. А. Павловського. К.: Техніка, 2007. – 400 c. 3.Теоретична механіка. Плоскопаралельний рух твердого тіла. Методичні вказівки до розв’язання задач та самостійної роботи студентів напряму підготовки 6.050502 «Інженерна механіка»/ Укл.: В. Ф. Кришталь – К. НТУУ
“КПІ”, 2011. – 33 с.
30