

tmech_RGR_PPR_MMI_2013
.pdfКінематичний аналіз плоского механізму з одним степенем вільності |
|
|
|
||||||||||
25 |
|
|
|
|
|
26 |
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
D φ4 |
|
|
3 |
|
|
|
φ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
Е |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
4 |
||
|
|
|
D |
|
|
A |
|
|
|
|
|
||
|
2 |
φ3 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
φ2 |
φ4 |
|
|
1 |
О |
φ1 |
|
В |
φ3 |
3 |
С |
|
A |
|
|
|
|
|
|
|
|
||||
1 |
Е |
|
|
|
|
|
|
|
|
|
|||
|
φ1 |
4 |
|
С |
|
|
|
|
|
|
|
|
|
О |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BD=2ВE |
|
||
|
|
|
BD=2DE |
|
|
|
|
|
|
|
|
|
|
27 |
|
|
|
|
|
28 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
φ2A |
|
|
|
С |
|
φ2A |
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
В |
|
|
|||
|
|
|
|
3 |
|
4 |
|
|
|
|
|
3 |
|
1О |
φ1 |
φ3 |
φ4 |
1 О |
|
φ |
φ4 |
|
φ3 |
||||
|
|
|
|
1 |
|
|
|||||||
|
|
|
В |
|
|
|
|
|
|
Е |
4 |
|
|
|
|
|
|
Е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
СD=2DE |
|
|
|
|
|
|
|
|
|
|
29 |
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
φ4 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
φ3 |
|
|
|
|
С |
φ4 |
|
|
|
|
4 |
|
С |
|
|
|
|
|
|
|
|
|
D |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В φ3 |
|
1 |
A |
|
|
φ2 |
В |
|
|
|
|
|
|
|
|
|
2 |
|
||||
|
1 |
A |
φ2 |
|
|
|
|
|
|
φ1 |
|
|
|
|
|
|
|
|
О |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
φ1 |
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
R4=CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BD=ВE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
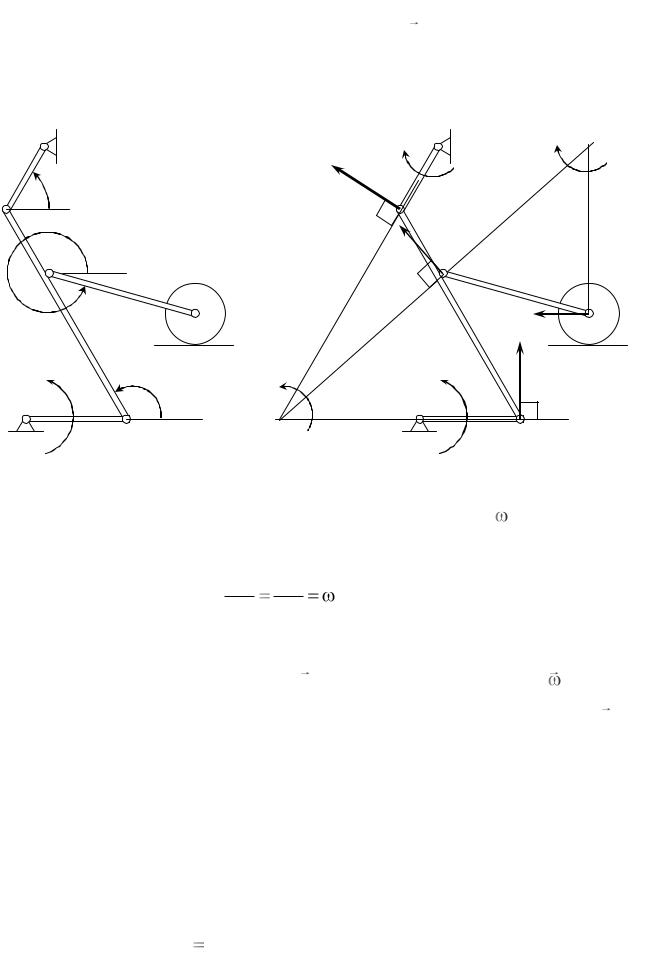
Рис.1, д |
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|

Кінематичний аналіз плоского механізму з одним степенем вільності
Вимоги до змісту розрахункової роботи.
Розрахункова робота повинна включати: зміст; умову задачі з рисунком,
який відповідає заданим параметрам системи; частину 1 в якій визначаються швидкості точок та кутові швидкості ланок (тіл) двома способами (за допомогою миттєвих центрів швидкостей та плану швидкостей) з відповідними рисунками та висновками; частину 2, в якій визначаються прискорення заданих точок двома способами (аналітичним та графічним); частину 3, в якій визначається миттєвий центр прискорень заданого тіла; висновки; список використаної літератури:
Зміст |
|
Умова........................................................................................................................ |
3 |
Частина 1. Визначення швидкостей точок та кутових швидкостей ланок |
|
За допомогою МЦШ............................................................................ |
4 |
За допомогою плану швидкостей....................................................... |
5 |
Частина 2. Визначення прискорень точок та кутових прискорень ланок |
|
Аналітичний спосіб............................................................................. |
7 |
План прискорень................................................................................. |
9 |
Частина 3. Визначення миттєвого центра прискорень........................................ |
10 |
Висновки................................................................................................................... |
11 |
Список використаної літератури............................................................................ |
12 |
Вимоги до оформлення розрахункової роботи.
Розрахункова робота оформлюється на листах формату А4 (210 297 мм)
з рамкою. Перший аркуш – титульний оформлюється згідно зразка, наступний аркуш – зміст роботи, потім подається умова задачі. Усі аркуші нумеруються наскрізно. Текстова частина може бути рукописною або друкованою. Рисунки оформлюються з використанням креслярського інструменту олівцем (або друкуються). Кожна частина, висновки та список використаної літератури подаються з початку сторінки.
12
Кінематичний аналіз плоского механізму з одним степенем вільності
Зразок оформлення титульного аркуша:
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ “КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ”
Кафедра теоретичної механіки
РОЗРАХУНКОВО-ГРАФІЧНА РОБОТА з дисципліни ТЕОРЕТИЧНА МЕХАНІКА на тему:
КІНЕМАТИЧНИЙ АНАЛІЗ ПЛОСКОГО МЕХАНІЗМУ З ОДНИМ СТЕПЕНЕМ ВІЛЬНОСТІ
Студента (ки) _____ курсу механікомашинобудівного інституту групи_______
напряму підготовки:_____________
________________________________
________________________________
(прізвище та ініціали)
Прийняв доцент, к.т.н._ Кришталь В.Ф.
Національна шкала 100 балів Кількість балів: _____
Оцінка: ECTS _____
м. Київ – 201_ рік
13

Кінематичний аналіз плоского механізму з одним степенем вільності
Критеріїї оцінювання.
А) Якість пояснювальної записки. Ваговий бал – 10. Критерії оцінювання:
-своєчасне якісне виконання пояснювальної записки, але є недоліки в оформленні – 9…10;
-пояснення викладені недостатньо повно – 7…8;
-є помилки в пояснювальній записці – 5…6;
-є суттєві недоліки в оформленні пояснювальної записки – 3…4;
-записка не оформлена належним чином або не оформлена – 0.
Б) Якість захисту роботи. Ваговий бал – 10. Критерії оцінювання:
-повне володіння матеріалом, є несуттєві недоліки – 9…10;
-неповне володіння матеріалом, є помилки при викладанні – 7…8;
-суттєві недоліки в викладенні матеріалу – 5…6.
-матеріал викладено невірно – 0-4.
Максимальна кількість балів за виконання РГР складає 20.
Приклад виконання завдання. Розв’язати завдання для багатоланкового механізму у положенні, яке зображено на рис.2,а. Кутова швидкість кривошипа
ОА ω1=10 рад/сек, ΟA = 20 см, AB = 50 см, BС = 10 см, BD = 15 см, DE = 40 см, φ1 = 0°, φ2 = 120°, φ3 = 60°, φ4 = 345°.
Р о з в ' я з а н н я : Швидкість точки А знайдемо, розглядаючи обертальний рух ланки OA:
vA 1 OA 200 см/c.
Вектор vA напрямлений перпендикулярно до ланки ОА в сторону, що відповідає напрямку її повороту (проти стрілки годинника).
Визначимо швидкості точок за допомогою миттєвих центрів швидкостей.
Для визначення швидкості точки В і кутової швидкості ланки АВ
знайдемо миттєвий центр швидкостей цієї ланки графічним способом: в точках
14
Кінематичний аналіз плоского механізму з одним степенем вільності
А і В проводимо прямі, перпендикулярні до векторів vA і напряму руху точки В
відповідно (рис.2,б). Точка P2 |
перетину цих |
прямих – |
миттєвий центр |
|||||
швидкостей ланки AB. |
|
|
|
|
|
|
||
|
C |
|
|
|
|
C |
|
Р4 |
|
|
|
|
vB |
|
|
|
|
B |
φ3 |
|
|
|
B |
ω3 |
|
ω4 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
vD |
D |
|
|
|
φ4 |
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
vE |
|
|
y |
|
|
|
|
vA |
|
|
|
|
|
|
|
|
|
|
|
ω1 |
φ2 |
|
|
|
|
|
|
|
|
|
|
|
ω1 |
|
|
|
|
O |
|
P2 |
ω2 |
O |
|
|
|
|
|
|
|
|
||||
|
A |
|
|
|
|
|
|
A |
|
Рис.2,а |
|
|
|
Рис.2,б |
|
|
|
|
Величину швидкості точки В і кутової швидкості ланки |
2 |
знаходимо з |
|||||
|
|
|
|
|
|
|
|
|
співвідношення |
|
|
|
|
|
|
|
|
|
|
vA |
vB |
2 . |
|
|
|
(1) |
|
|
P2 A |
P2B |
|
|
|
||
|
|
|
|
|
|
|
||
Напрям повороту ланки АВ навколо миттєвого центра швидкостей відповідає напряму вектора швидкості vA , вектор кутової швидкості 2 ланки
AB напрямлений перпендикулярно до площини рисунка до читача. Вектор vB
перпендикулярний до прямої Р2В і узгоджується за напрямком з поворотом шатуна АВ.
Відстані від точок А та В до Р2 можна визначити шляхом вимірювання на схемі (схема будується за масштабом) або на підставі аналізу трикутника АВР2.
Оскільки кути при вершині А та В у цьому трикутнику дорівнюють 60°,
трикутник АВР2 – рівносторонній, тобто AP2 =AB =BP2 =50 см. Тоді з (1): vB 200 см/ c;
15

Кінематичний аналіз плоского механізму з одним степенем вільності
|
vA |
|
4 рад/c. |
|
2 |
P2 A |
|||
|
||||
|
|
|||
Для визначення швидкості точки D сполучаємо її з точкою Р2. Вектор швидкості точки D буде напрямлений перпендикулярно до прямої Р2D у бік обертання ланки АВ навколо МЦШ. Величина швидкості vD визначається так
vD = ω2∙Р2D,
де відстань Р2D визначається вимірюванням з рисунка, або з трикутника АDР2.
В останньому випадку, на підставі теореми косинусів отримаємо:
Р2D2 = Р2А2 + АD2−2∙Р2А∙АD∙cos60°.
Після підстановки числових даних Р2D=44,44 см, vD = 177,76 см/с.
Наступним кроком знайдемо швидкість точки Е. Для цього визначимо МЦШ ланки DЕ графічним способом: проведемо перпендикуляр до вектора швидкості vD (пряма Р2D) та перпендикуляр до напряму руху точки Е (рис.2,б).
Перетин вказаних перпендикулярів, точка Р4, є МЦШ ланки DЕ. Напрям повороту ланки DЕ навколо миттєвого центра швидкостей Р4 узгоджується з напрямом вектора швидкості vD і здійснюється за стрілкою годинника,
відповідно до цього, вектор кутової швидкості |
4 |
ланки DЕ напрямлений |
ab . |
|
|
|
Вектор vE перпендикулярний до прямої Р4Е і узгоджується за напрямом з поворотом ланки DЕ.
Відстані Р4D та Р4Е можна визначити шляхом вимірювання на схемі та перерахуванням згідно масштабу або на підставі аналізу трикутника DEР4. За
теоремою синусів можна записати: |
|
|
|
|||
|
P4E P4D |
|
DE |
|||
|
|
|
|
|
|
. |
|
sin D sin E |
sin P4 |
||||
Тут D , E , P4 - кути при відповідних вершинах у трикутнику DEР4.
Застосовуючи теорему синусів до трикутника АDР2 (або вимірюючи на рисунку) можна знайти кут при вершині Р2: P2 =43°. Тоді маємо D =58°,
16
Кінематичний аналіз плоского механізму з одним степенем вільності
E =75°, P4 =47°, що дозволяє знайти шукані відстані Р4D = 52,85 см, Р4Е =46,38
см.
Кутова швидкість ланки DЕ та величина швидкості точки Е знаходиться на підставі співвідношення
vD |
|
vE |
|
, |
P4D |
|
P4E |
4 |
|
|
|
|
з якого отримаємо ω4 =3,36 рад/с, vЕ = 155,91 см/с.
Оскільки точка С нерухома, кутова швидкість ланки ВС визначається за
відомою швидкістю точки В
3 vB ,
CB
звідки знайдемо ω3 =20 рад/с.
Визначимо швидкості точок за допомогою плана швидкостей.
Побудова плана швидкостей грунтується на теоремі про розподіл
швидкостей точок тіла, яке здійснює плоскопаралельний рух. Для визначення
швидкості точки В обираємо за полюс точку А, |
швидкість якої відома. Тоді |
||
можна записати vB = vA vAB , де vAB |
2 AB |
- швидкість |
точки В при |
обертанні навколо полюса А. Від довільної точки площини S |
відкладаємо у |
||
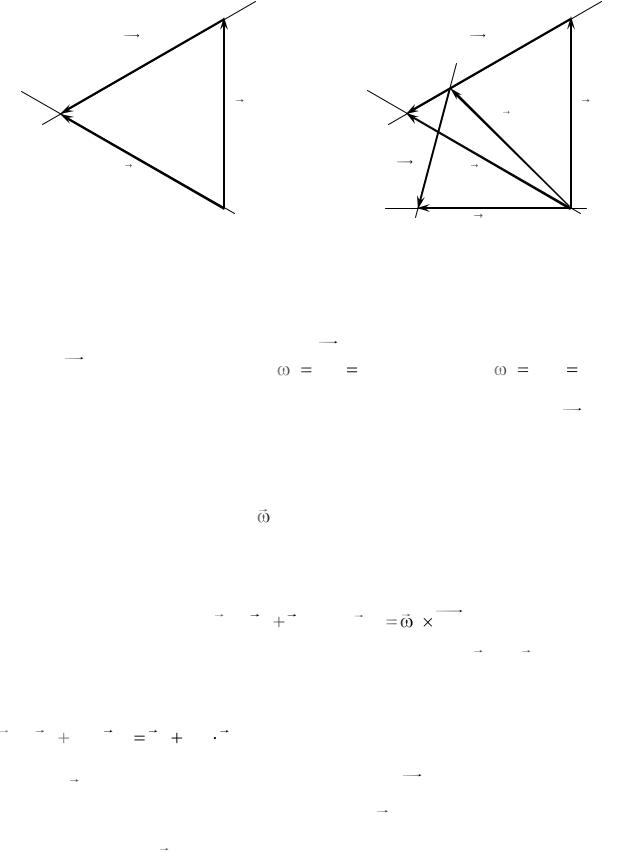
вибраному масштабі ( 1 см відповідає 40 см/с ) вектор a , який відповідає вектору швидкості vA (рис.2,в). Через кінець цього вектора проводимо пряму l1
перпендикулярну до відрізка АВ (на цій прямій лежить вектор ab , який відповідає швидкості vAB ). З точки S проводимо пряму l2, яка паралельна до напряму швидкості точки В. Перетин вказаних прямих визначає кінець векторів ab та b, де останній відповідає шуканому вектору швидкості vB .
Перераховуючи за масштабом, отримаємо а=200 см/с, b=200 см/с.
17
Кінематичний аналіз плоского механізму з одним степенем вільності
l1 |
|
l1 |
ab |
|
ab |
|
|
l3 |
l2 |
l2 |
|
a |
|
a |
|
|
d |
b |
de |
b |
|
l4 |
|
S
e
S
Рис.2,в |
Рис.2,г |
З плану швидкостей визначимо кутову швидкість ланки АВ. Величину
вектора ab підставимо у формулу |
|
|
ab |
vAB , отримаємо |
|
200 |
4 рад/с. |
|
|
|
|
||||
2 |
|
|
2 |
50 |
|||
|
|
||||||
|
|
АВ |
AB |
|
|||
|
|
|
|
|
Для визначення напряму кутової швидкості перенесемо вектор ab , який
знайдений на плані швидкостей, у точку В. Напрям цього вектора узгоджується
з поворотом точки В навколо вибраного полюса А – проти стрілки годинника,
отже, вектор кутової швидкості |
2 |
напрямлений перпендикулярно до площини |
|
|
|
|
|
рисунка у бік читача. |
|
|
|
При визначенні швидкості точки D, яка належить ланці АВ, |
|||
скористаємось формулою vD = vA |
|
vAD , де vAD |
2 AD - швидкість точки D |
при обертанні навколо полюса А. Зауважимо, що вектори vAD і vAB збігаються
за напрямом, а |
їх величини задовольняють умові: |
vAD:vAB = AD:AB. Отже |
|
vD = vA |
AD vAB |
vA 0,7 vAB . На плані швидкостей (рис.2,г), від кінця |
|
|
AB |
|
|
вектора |
a відкладемо вектор, який дорівнює 0,7 ab , |
та сполучаємо точку S з |
|
кінцем цього вектора – отримаємо вектор d , який у обраному масштабі відповідає вектору vD . Враховуючи масштаб, отримаємо величину швидкості точки D – d=176 см/с.
18
Кінематичний аналіз плоского механізму з одним степенем вільності
Для визначення швидкості точки Е обираємо за полюс точку D,
швидкість якої відома. Тоді можна записати vE = vD vDE , де vDE 4 DE -
швидкість точки Е при обертанні навколо полюса D.
Через кінець вектора d проводимо пряму l3 перпендикулярну до відрізка
DE (на прямій l3 лежить вектор de , який відповідає швидкості vDE ). З точки S
проводимо пряму l4, яка паралельна до напряму швидкості точки Е. Перетин вказаних прямих визначає кінець векторів de та e , де останній відповідає шуканому вектору швидкості vE . Перераховуючи за масштабом, отримаємо
е=160 см/с.
З плану швидкостей визначимо кутову швидкість ланки DE. Величину
вектора de |
підставимо у формулу |
|
|
de |
|
vDE , отримаємо |
|
128 |
3,2 |
|
|
|
|
|
|||||
4 |
|
|
|
4 |
40 |
||||
|
|
DE |
DE |
|
|||||
|
|
|
|
|
|||||
рад/с. Для знаходження напряму кутової швидкості вектор de , який визначений на плані швидкостей, перенесемо у точку Е. Напрям цього вектора відповідає повороту точки Е навколо вибраного полюса D – за стрілкою годинника,
відповідно, вектор кутової швидкості 4 напрямлений перпендикулярно до площини рисунка від читача.
Використовуючи план швидкостей можна знайти кутову швидкість ω3
ланки ВС. Враховуючи, що точка С нерухома, одержимо |
|
|
b |
|
|
vB |
або |
|||
|
|
|
|
|
||||||
3 |
CB |
|
CB |
|||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
|
200 |
20 |
рад/с. |
|
|
|
|
|
|
|
3 |
10 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Складемо порівняльну таблицю величин швидкостей точок та кутових швидкостей ланок.
|
|
Швидкості точок, см/с |
Кутові швидкості ланок, рад/с |
||||
|
|
|
|
|
|
|
|
|
|
B |
D |
E |
АВ (ω2) |
ВC (ω3) |
DE (ω4) |
|
|
|
|
|
|
|
|
За допомогою МЦШ |
200 |
177,76 |
155,91 |
4 |
20 |
3,36 |
|
За |
планом |
200 |
176 |
160 |
4 |
20 |
3,2 |
швидкостей |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
19 |
|
|
|

Кінематичний аналіз плоского механізму з одним степенем вільності
Розбіжності між значеннями наведених фізичних величин складає менше
5 %, що можна вважати прийнятним для використання у подальших розрахунках.
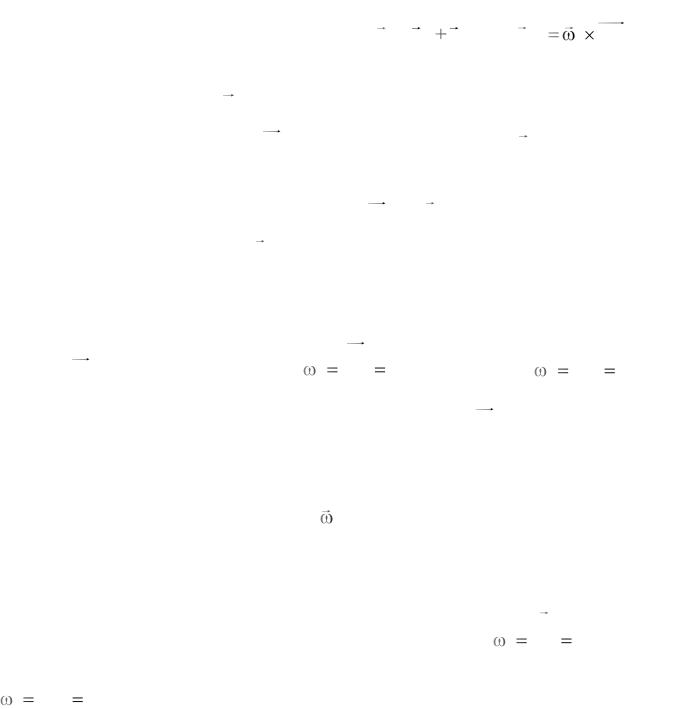
Визначимо прискорення точки В аналітичним методом.
Виберемо полюс в точці А і за теоремою про розподіл прискорень запишемо
|
|
|
wB =wA +wобAB +wдцAB . |
|
(2) |
||
Оскільки ланка ОА обертається рівномірно, то wобA =0 і прискорення |
|||||||
точки А визначиться так: |
|
|
|
|
|||
|
|
|
wA =wобA +wдцA =wдцA ; |
|
|
||
|
|
|
wдцА |
12 OA |
2000 см/ c2 . |
|
|
Вектор wA напрямлений від точки А до точки O (рис.2,д). |
|
||||||
Вектор wдц |
має напрям від точки В до полюса А і дорівнює |
|
|||||
AB |
|
|
|
|
|
|
|
|
|
|
wдцAB |
22 AB |
800 см/с2 . |
|
|
Вектор wоб |
= |
2 |
AB перпендикулярний до ланки АВ, але обчислити його |
||||
AB |
|
|
|
|
|
|
|
величину неможливо, тому що наразі |
невідоме |
значення 2 . Дійсно, |
за |
||||
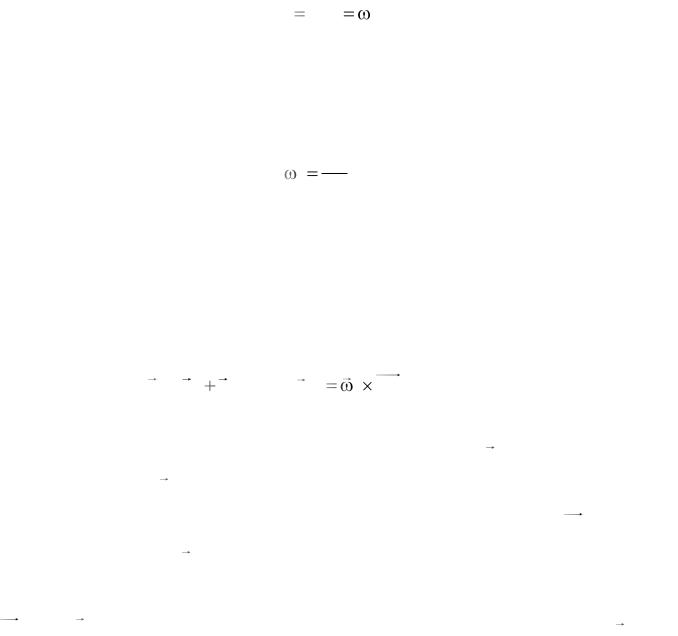
означенням кутового прискорення маємо |
2 2 . |
Але кутову швидкість |
2 |
||||
визначено тільки для даного моменту часу і як функція часу вона невідома,
оскільки у виразі
|
d |
|
d |
|
vA |
vA |
d |
1 |
, |
|
2 |
dt |
2 |
dt |
|
AP |
dt |
|
AP |
||
|
|
|
|
|
|
|||||
|
|
|
|
2 |
|
|
2 |
|
||
відстань AP2 до миттєвого центра швидкостей під час руху механізма змінюється за невідомим законом.
20